Файл: Моделирование, кинематическое и динамическое исследование и симуляция манипулятора с 5 степенями свободы.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.11.2023
Просмотров: 65
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Таким образом, уравнения динамики движения реального манипулятора могут быть получены методами Лагранжа-Эйлера или Ньютона-Эйлера. Уравнения Лагранжа-Эйлера обеспечивают строгое описание динамики манипулятора. Их можно использовать для решения прямой и обратной задачи динамики.
Прямая задача состоит в том, чтобы по заданным силам и моментам определить обобщённые ускорения, интегрирование которых позволит получить значения обобщённых координат и скоростей.
Обратная задача динамики заключается в том, чтобы по заданным обобщённым координатам, скоростям и ускорениям определить действующие в сочленениях манипулятора силы и моменты.
Для решения обеих задач, как правило, необходимо вычислить динамические коэффициенты
 и
и  . Вычисление этих коэффициентов требует выполнения очень большого числа арифметических операций. В связи с этим уравнения Лагранжа-Эйлера без дополнительных упрощений практически неприменимы для управления манипулятором в реальном времени.
. Вычисление этих коэффициентов требует выполнения очень большого числа арифметических операций. В связи с этим уравнения Лагранжа-Эйлера без дополнительных упрощений практически неприменимы для управления манипулятором в реальном времени.5.1 Метод Лагранжа-Эйлера
Полное описание движения манипулятора можно получить, применяя метод Лагранжа-Эйлера для неконсервативных систем. Описав кинематику манипулятора с помощью матричного представления Денавита-Хартенберга, можно получить уравнение динамики. Такое совместное использование Д-Х-представления и метода Лагранжа приводит к компактной векторно-математической форме уравнений движения, удобной для аналитического исследования и допускающей реализацию на ЭВМ.
Вывод уравнений динамики движения манипулятора основан на следующем:
1. На описании взаимного пространственного расположения систем координат i-го и (i-1)-го звеньев с помощью матрицы преобразования однородных координат
 . Эта матрица преобразует координаты произвольной точки относительно i-й системы координаты этой же точки относительно (i-1)-й системы координат.
. Эта матрица преобразует координаты произвольной точки относительно i-й системы координаты этой же точки относительно (i-1)-й системы координат.2. На использовании уравнения Лагранжа-Эйлера:
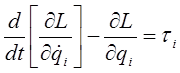
(37)
где L-функция Лагранжа


полная кинетическая энергии манипулятора;
 полная потенциальна энергия манипулятора;
полная потенциальна энергия манипулятора; обобщённые координаты манипулятора;
обобщённые координаты манипулятора; первая производная по времени обобщённых координат;
первая производная по времени обобщённых координат; обобщённые силы (или моменты), создаваемые в i-м сочленении для реализации заданного движения i-го звена.
обобщённые силы (или моменты), создаваемые в i-м сочленении для реализации заданного движения i-го звена.Для того, чтобы воспользоваться уравнением Лагранжа-Эйлера, необходимо выбрать систему обобщённых координат. Обобщённые координаты представляют собой набор координат, обеспечивающий, полное описание положения рассматриваемой физической системы в абсолютной системе координат. Существуют различные системы обобщенных координат, пригодные для описания простого манипулятора с вращательными и поступательными сочленениями. Однако, поскольку углы поворотов в сочленениях непосредственно доступны измерению с помощью потенциометров или других датчиков, то они составляют наиболее естественную систему обобщенных координат. В этом случае обобщённые координаты совпадают с присоединенными переменными манипулятора. В частности, если i-е сочленение вращательное, то
 , если же i-е сочленение поступательное, то
, если же i-е сочленение поступательное, то  .
.5.2 Обратная динамика
Обратная задача динамики заключается в том, чтобы определить крутящий момент, необходимый для каждого из приводов робота, с учетом текущего положения и скорости, и желаемого ускорения. Эта информация важна на этапах моделирования проекта для определения требуемых характеристик привода, которые будут использоваться на физическом прототипе. Кроме того, расчет обратной динамики можно использовать в алгоритме управления крутящим моментом. Чтобы вычислить обратную динамику всей руки, мы сначала считаем связи робота между рукой и рабочим органом жесткими. Используя кинематику, описанную в предыдущем разделе, мы вычисляем положение центра масс и значение матрицы инерции рабочего органа с прикрепленным к нему остатком робота. Затем вычисляется обратная динамика для манипулятора. Вектор крутящих моментов, приложенных к шарнирам, отмечен
 , который обобщает уравнения обратной динамики движения робота-манипулятора в виде вектора, записывается следующим образом:
, который обобщает уравнения обратной динамики движения робота-манипулятора в виде вектора, записывается следующим образом:
(38)
где
– обобщённые силы в i -м сочленении для реализации движения i -го звена,  определяется формулой (39), устанавливает связь сил и моментов которые действуют в сочленениях с ускорениями присоединённых переменных,
определяется формулой (39), устанавливает связь сил и моментов которые действуют в сочленениях с ускорениями присоединённых переменных,  – определяется равенством (40) и (41), устанавливает связь сил и моментов, которые действуют в сочленениях со скоростями изменения присоединенных переменных,
– определяется равенством (40) и (41), устанавливает связь сил и моментов, которые действуют в сочленениях со скоростями изменения присоединенных переменных,  определяется равенством (42), вычисляет силу тяжести, воздействующую на звенья манипулятора,
определяется равенством (42), вычисляет силу тяжести, воздействующую на звенья манипулятора,  – обобщённое ускорение,
– обобщённое ускорение,  – обобщённая скорость,
– обобщённая скорость,  – количество звеньев робота-манипулятора.
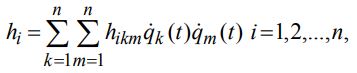
– количество звеньев робота-манипулятора. Коэффициенты определяются равенством
Коэффициенты определяются равенством(39)
Коэффициенты
 определяются равенством
определяются равенством
(40)
(41)
Где
 – матрица, описывает изменения положения i-го звена, возникающие при движении в j -м сочленении манипулятора;
– матрица, описывает изменения положения i-го звена, возникающие при движении в j -м сочленении манипулятора;  – матрица моментов инерции j-го звена;
– матрица моментов инерции j-го звена;  – след полученной матрицы. Коэффициенты определяются равенством
– след полученной матрицы. Коэффициенты определяются равенством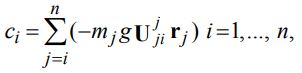
(42)
где
 – масса j -го звена;
– масса j -го звена;  – матрица описывает изменения положения i звена, возникающие при движении в j сочленении манипулятора;
– матрица описывает изменения положения i звена, возникающие при движении в j сочленении манипулятора;  – вектор центра масс i звена в собственной системе отсчёта,
– вектор центра масс i звена в собственной системе отсчёта,  – сила тяжести.
– сила тяжести.5.3 Формулировка обратной динамики в MatLab
В этой части речь идет о численном решении уравнений руки манипулятора, составляющих вектор крутящих моментов приводов в зависимости от того, является ли соединение ротоидным или призматическим через интерфейс MatLab.
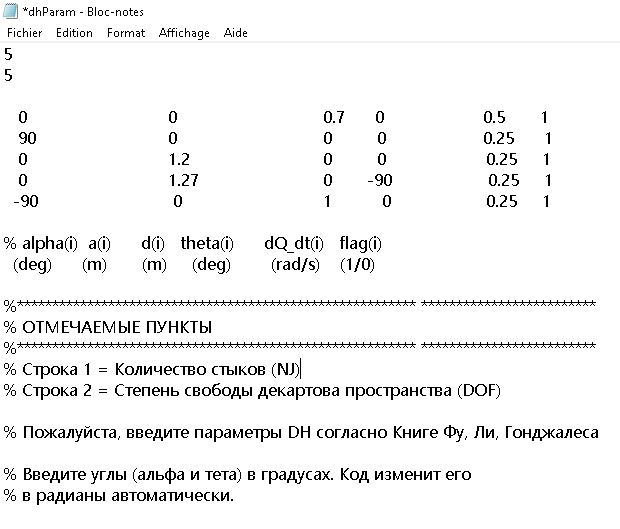
Обратная динамика робота-манипулятора любой степени свободы с использованием динамической формулировки Лагранжа-Эйлера (J. J. Uicker, "On the dynamic analysis of spatial linkages using 4 x 4 matrices," Ph.D. dissertation, Northwestern Univ., Aug. 1965). Входными данными являются переменные суставного пространства (положение сустава, скорость и ускорения), а выходными данными являются крутящие моменты/силы в суставах. Код использует дистальные параметры DH манипулятора. Существует только один входной файл: текстовый файл (dhParam.txt), который получает от пользователя дистальные параметры DH манипулятора, а также необходимо ввести скорости и ускорения суставов.
Структура кода приведена ниже:
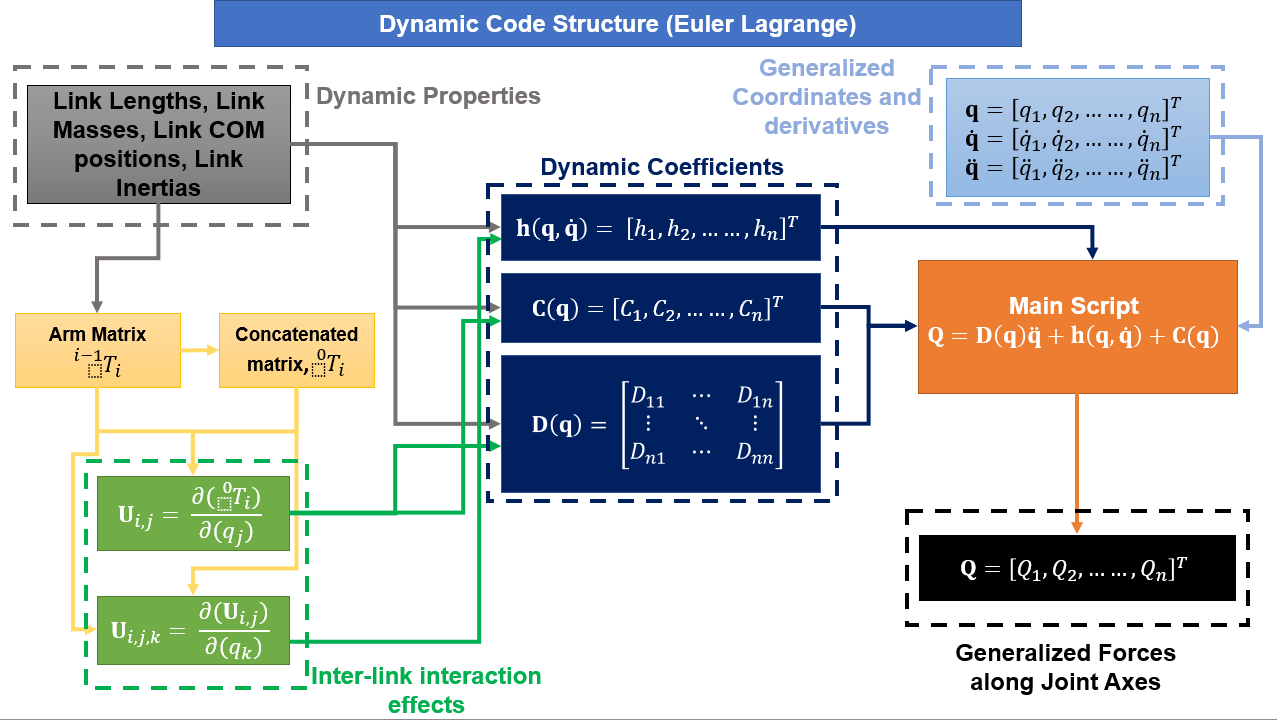
Рис. 11. Динамическая структура кода (Эйлер Лагранж)
Объяснение скриптов, включенных в репозиторий:
1). ArmMatrix.m вычисляет однородные матрицы преобразования от одного кадра к соседнему кадру, в то время как T_Concat.m вычисляет конкатенированную матрицу от начального кадра к конечному кадру.
2). inv_dynamics_Euler_Lagrange.m — это основной скрипт, который необходимо выполнить для вычисления крутящих моментов в суставах. Поскольку это код обратной динамики, выходными данными будут крутящие моменты (в случае вращательных шарниров) и силы (в случае призматических шарниров) вдоль осей шарнира. Формулировка Эйлера-Лагранжа выполняется в матричной форме, где нам нужно вычислить матрицу инерционного ускорения, матрицу центробежной силы и силы Кориолиса, а также матрицу гравитационной нагрузки.
3). inertia_acceleration_matrix.m — это функция, которая вычисляет матрицу инерционного ускорения. Каждый член этой матрицы в основном означает реактивный крутящий момент/силу, воздействующую на конкретное соединение/звено из-за ускорения другого соединения/звена. Эта матрица всегда симметрична и положительно определена.
4). centri_cor_force_matrix.m — это функция, которая вычисляет матрицу центробежной силы и силы Кориолиса. Каждый член этой матрицы вычисляет центробежную силу и силу Кориолиса, создаваемую одним шарниром/звеном из-за скорости двух других шарниров/звеньев. Эта матрица является самой затратной в вычислительном отношении, и для приложений с низкими скоростями ею можно пренебречь.
5). gravity_loading_matrix.m — это функция, которая вычисляет матрицу гравитационной нагрузки, каждый член которой соответствует рассмотрению потенциальной энергии каждого звена из-за гравитации.
6). U1_matrix.m — это функция, которая вычисляет влияние на положение и ориентацию конкретного звена из-за движения двух других звеньев. По сути, это матрица. Функция в основном вычисляет все такие возможные матрицы (например, движение 2-го и 3-го суставов в манипуляторе не окажет никакого влияния на положение и ориентацию базового сустава, вместо этого будет наоборот) и группирует их в тензор (матрицу ячеек) и возвращает матрицу ячеек при вызове в основном скрипте.
7). U_matrix.m — это функция, которая вычисляет влияние движения одного звена/соединения на положение и ориентацию другого звена. Он вычисляет матрицу так же, как U1_matrix.m.
8). inertia_matrix.m — это функция, которая вычисляет матрицу/тензор псевдоинерции каждой ссылки в манипуляторе. Момент инерции массы звена рассчитывается по отношению к раме дистального шарнира звена.
Эта формулировка имеет вычислительную сложность
 , что делает ее вычислительно неэффективной и непригодной для таких приложений, как тестирование конструкции контроллера в реальном времени, хотя это высокоструктурированный алгоритм.
, что делает ее вычислительно неэффективной и непригодной для таких приложений, как тестирование конструкции контроллера в реальном времени, хотя это высокоструктурированный алгоритм.Для выполнения сценария inv_dynamics_Euler_Lagrange.m на нашем манипуляторе с 5 степенями свободы мы должны произвольно выбрать положение манипулятора, определить параметры DH, скорости и тип рычажного соединения (0/1) каждого сустава через файл dhParam.txt. Затем в основном скрипте вводим геометрические характеристики тел нашего робота-манипулятора (Табл. 1).