Файл: Развитие общества невозможно без использования энергии. Масштабы энергопотребления за несколько тысячелетий возросли до громадных величин. Потребность в энергии резко повышается с техническим и культурным прогрессом.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.11.2023
Просмотров: 82
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
.
 2 КОНСТРУКТОРСКАЯ ЧАСТЬ
2 КОНСТРУКТОРСКАЯ ЧАСТЬ
2.1 Обоснование выбора двигателя для поперечно-строгального станка
Основными конструкциями линейных асинхронных двигателей являются плоская и цилиндрическая. В свою очередь, плоский линейный асинхронный двигатель может быть одно- и двухсторонним.
Линейный асинхронный двигатель можно получить, если мысленно разрезать по образующим обычный асинхронный двигатель и развернуть в плоскости его пакеты статора и ротора. Статор линейного асинхронного двигателя называется индуктором, ротор - бегуном. Во всех линейных асинхронных двигателях длина вторичного элемента, или бегуна, превышает длину сердечника индуктора. Превышение определяется задаваемым перемещением (ходом) бегуна.
В линейных асинхронных двигателях вместо вращающегося с частотой n1=f1p образуется бегущее со скоростью ν1=2f1τ магнитное поле, которое создаётся трёхфазной обмоткой при подключении её к трёхфазной сети. Бегущее поле наводит в короткозамкнутой обмотке бегуна ЭДС, имеющую частоту f2=sf1 и вызывающую появление токов. Эти токи совместно с бегущим магнитным полем образуют силу, приводящую бегун в движение со скоростью ν=(1-s)ν1.
Из-за разомкнутости сердечников индуктора и бегуна в линейных асинхронных двигателях появляются дополнительные магнитные поля на концах сердечника индуктора (продольный краевой эффект).
Продольный краевой эффект приводит к появлению паразитных тормозных усилий, обусловленных наличием наряду с бегущей пульсирующей составляющей магнитного поля, к неравномерному распределению токов в фазах обмотки, к появлению дополнительных потерь в обмотке статора и во вторичном элементе. Для ослабления продольного краевого эффекта в линейных асинхронных двигателях применяются трёхфазные обмотки с дополнительными катушечными сторонами и компенсированными элементами в виде короткозамкнутых витков.
 Если в качестве бегуна используется сплошная твердая электропроводящая полоса или жидкий металл, в них возникают токи, текущие на краях и вдоль бегуна и приводящие к появлению поперечного краевого эффекта.
Если в качестве бегуна используется сплошная твердая электропроводящая полоса или жидкий металл, в них возникают токи, текущие на краях и вдоль бегуна и приводящие к появлению поперечного краевого эффекта.
Поперечный краевой эффект выражается в неравномерном распределении токов по ширине вторичного элемента, что
приводит к появлению поперечных сил, действующих параллельно плоскости индуктора и стремящихся сдвинуть вторичный элемент относительно индуктора в направлении, перпендикулярном направлению движения, если продольные оси первичного и вторичного элементов смещены друг относительно друга. Кроме того, возникают поперечные силы, стремящиеся притянуть плоский вторичный элемент к индуктору. При применении цилиндрической конструкции поперечный краевой эффект исключается благодаря осевой симметрии. В тихоходных линейных асинхронных двигателях (скорость меньше 3 м/с), а так же при больших значениях 2р влияние продольного краевого эффекта на рабочие характеристики можно не учитывать.
Разомкнутость и конечная ширина магнитопроводов и возникающие из-за этого продольные и поперечные краевые эффекты вносят особенности в теорию и методику расчёта линейных асинхронных двигателей. В качестве исходных данных задаются циклограмма и график изменения силы, значение пусковой силы и пределы целесообразного изменения частоты на выходе преобразователя частоты. Исходные конструктивные параметры – это длина хода бегуна и максимально-допустимые размеры.
В основе всех разработанных моделей и методик лежит решение задачи определения магнитного поля в области расположения вторичного элемента при конечных размерах индуктора. Магнитное поле определяется в режимах холостого хода и нагрузки. Последовательно определяются магнитные индукции, ЭДС и токи, учитывающие краевые эффекты, а затем силы, зависящие от скольжения, КПД и коэффициент мощности. Расчёт при учёте конструктивных особенностей и краевых эффектов в общем случае является невозможным без упрощающих допущений. Количество и характер принимаемых допущений обуславливают вид расчётной модели линейных асинхронных двигателей.
 В одномерных расчётных моделях учитывается изменение магнитного поля по одной координате, параллельной продольной или поперечной оси двигателя. В результате учитываются либо продольный, либо поперечный краевой эффект. Двухмерные модели позволяют учитывать один из краевых эффектов и изменение магнитного поля по высоте рабочего зазора. В трёхмерных моделях, когда одновременно учитываются два вида краевых эффектов, рассчитывается изменение индукции по трём координатам.
В одномерных расчётных моделях учитывается изменение магнитного поля по одной координате, параллельной продольной или поперечной оси двигателя. В результате учитываются либо продольный, либо поперечный краевой эффект. Двухмерные модели позволяют учитывать один из краевых эффектов и изменение магнитного поля по высоте рабочего зазора. В трёхмерных моделях, когда одновременно учитываются два вида краевых эффектов, рассчитывается изменение индукции по трём координатам.
Обычными для одномерных моделей являются следующие допущения: индукторы не имеют пазов, что учитывается введением эквивалентного магнитного зазора δэ=kμkδδ; магнитная проницаемость стали сердечников индуктора и бегуна μст=∞, электропроводность σст=0, имеющее место в реальных линейных асинхронных двигателях магнитное насыщение учитывается увеличением δэ через коэффициент насыщения kμ; поперечный краевой эффект не учитывается; вторичный элемент в виде твёрдой электропроводящей полосы имеет толщину δс, и находится внутри зазора δэ; обмотки индуктора заменяются эквивалентными тонкими токовыми слоями, расположенными на внутренних поверхностях индуктора и имеющими линейную поверхностную плотность тока j1. Влияние продольного краевого эффекта зависит от свойств активных материалов и скорости вторичного элемента. В общем случае индуктивное сопротивление зависит от режима работы, что необходимо учитывать при разработке преобразователя частоты и средств автоматического управления для линейных асинхронных двигателей. Уравнения, соответствующие двух- и трёхмерным моделям, позволяют получать более точные числовые значения рассматриваемых физических величин. Однако одномерным моделям соответствуют более простые аналитические выражения с чётко выраженными параметрическими связями. Расчёты с помощью одномерных моделей являются достаточно точными для многих практических случаев.
 В асинхронном двигателе регулирование скорости движения бегуна обеспечивается либо за счёт повышения скольжения, либо при использовании статического преобразователя частоты.
В асинхронном двигателе регулирование скорости движения бегуна обеспечивается либо за счёт повышения скольжения, либо при использовании статического преобразователя частоты.
Линейный асинхронный двигатель предназначен для повторно-кратковременных режимов работы с заданной пусковой силой. Рабочие циклы включают разгон, движение с максимальной скоростью и торможение. Рабочие циклы определённой продолжительности повторяются через заданные промежутки времени (паузы). Предполагается, что двигатель управляется с помощью преобразователя частоты, обеспечивающего как разгон при повышении частоты от fmin до fmax, так и генераторное торможение. Напряжение на выходе преобразователя частоты может регулироваться необходимым образом (закон определяется из расчёта, а затем уточняется и обеспечивается системой автоматического управления) при изменении частоты.
Цилиндрический линейных асинхронный двигатель относится к одной из двух основных конструкций линейных асинхронных двигателей и имеет предпочтение перед плоским, так как в нём исключается поперечный краевой эффект.
Бегун может иметь различные исполнения. Аналогом короткозамкнутого ротора асинхронного двигателя является бегун плоского линейного асинхронного двигателя в виде ферромагнитной полосы с пазами, в которые уложены электропроводимые стержни, замкнутые накоротко с обеих сторон шинами.
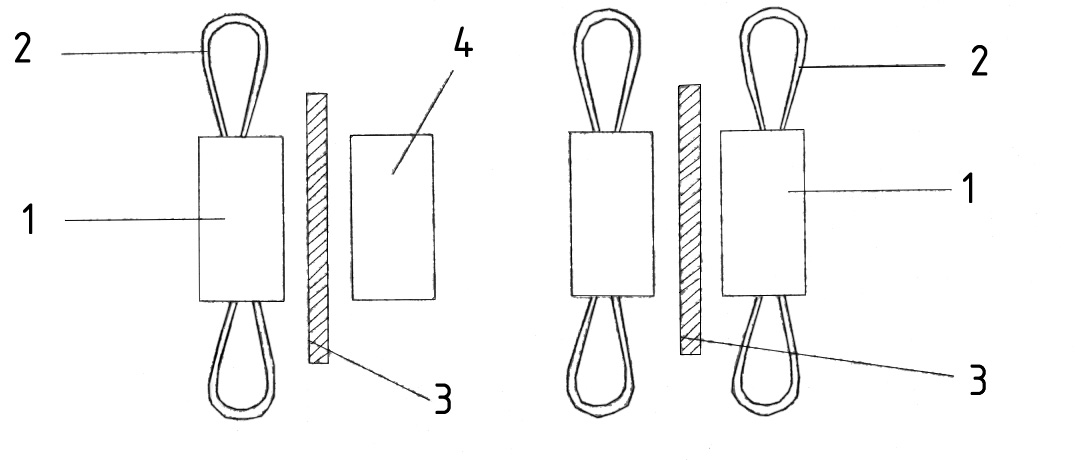
1 – сердечник индуктора (статора), 2 – обмотка индуктора, 3 – бегун (ротор), 4 – неактивная часть индуктора.
Рисунок 2.1 – Схемы плоских линейных асинхронных двигателей
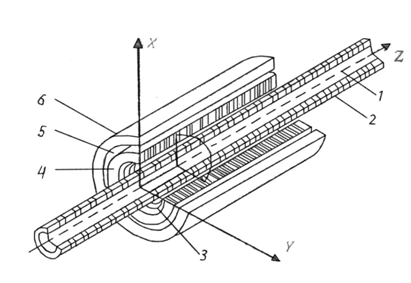
1 – спинка бегуна, 2 - чередующиеся медные и стальные кольца, 3 – воздушный зазор (между индуктором и бегуном), 4 – обмотка индуктора, 5 – технологический зазор, 6 – стальной сердечник.
Рисунок 2.2 – Схема цилиндрического линейного асинхронного двигателя
 В качестве бегуна плоского линейного двигателя может использоваться электропроводящая неферромагнитная шина. Двухслойных бегун состоит из стальной полосы (спинки бегуна) и электропроводящей шины. Спинка бегуна может быть выполнена сплошной или шихтованной.
В качестве бегуна плоского линейного двигателя может использоваться электропроводящая неферромагнитная шина. Двухслойных бегун состоит из стальной полосы (спинки бегуна) и электропроводящей шины. Спинка бегуна может быть выполнена сплошной или шихтованной.
Цилиндрический линейный асинхронный двигатель может иметь аналогичные конструкции бегуна, например, одним из является стальная труба, на которую напрессованы вперемежку стальные кольца (зубцы) и медные кольца (пазы).
Однослойная концентрическая обмотка с расположением лобовых частей в трех плоскостях наиболее удобна в изготовлении, так как при её выполнении не возникает трудностей с размещением крайних катушечных сторон. Для его компенсации применяется компенсационная катушка с числом витков Wк. Ток Iк этой катушки должен изменятся в фазе с током фазы С обмотки, и поэтому она соединяется последовательно с данной фазой. Применение компенсационных катушек приводит к увеличению полного сопротивления фазы С и вызывает нежелательную асимметрию токов фаз.
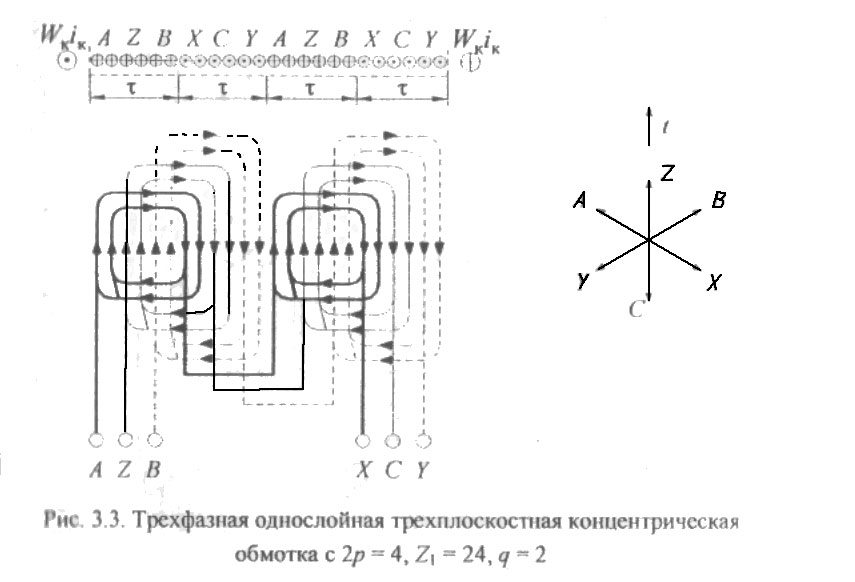
Рисунок 2.3 – Трехфазная однослойная трехплоскостная концентрическая обмотка с 2р=4, Z1=24, q=2
Двухслойные обмотки более предпочтительны для использования в линейных двигателях, чем однослойные, по своим электромагнитным свойствам. Прежде всего это связано с тем, что токи в их лобовых частях направлены встречно и поэтому создают более слабый пульсирующий поток. Однако при укладке катушек, соединяемых по правилам образования двухслойных обмоток обычных асинхронных двигателей, в статоре линейных асинхронных двигателей остаются полупустые пазы. В результате в двигателях с обмоткой, выполненной по указанной схеме, поле на концах индуктора будет ослаблено, что приведёт к уменьшению силы, развиваемой в активной зоне.
Для ликвидации этого недостатка полупустые пазы заполняют дополнительными катушечными сторонами с токами, равными токам фаз.
Обмотки цилиндрических линейных асинхронных двигателей состоят из кольцевых катушек, каждая из которых соответствует одной катушечной стороне обмотки. Обмотки можно выполнять с сокращённым шагом, если в каждый паз уложить две катушки и сместить электрически фазные зоны двух слоев катушек друг относительно друга, однако применение таких обмоток серьёзно усложняет конструкцию двигателя и процедуру изготовления. В результате выигрыш от улучшения кривой поля в зазоре не компенсирует повышенных затрат на производство.
Полюсное деление выбирается минимально возможным по конструктивным соображениям: не может быть взята ширина зубцов меньше, чем 1-2мм, пазов – менее 3 мм. При этом τmin=m1qt1min=12мм.
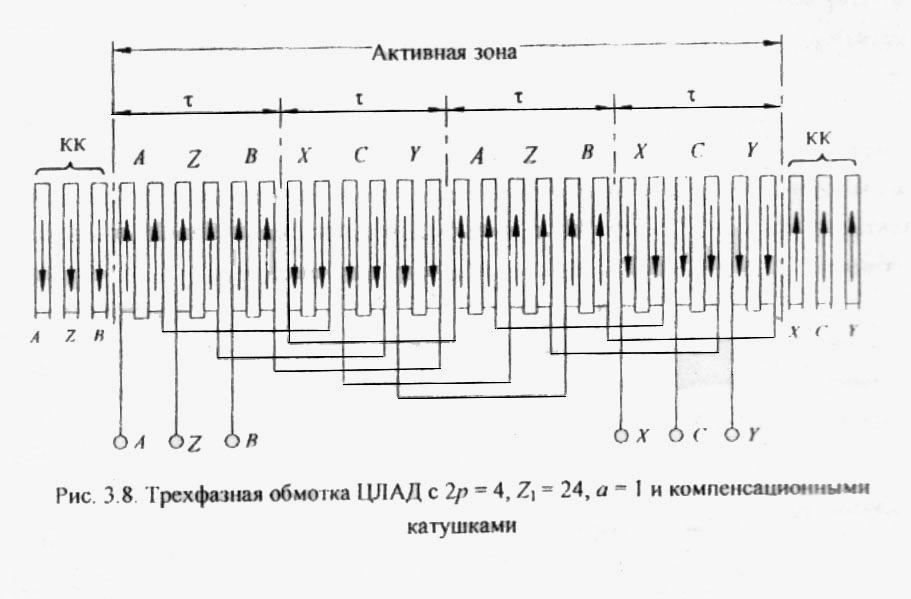
Рисунок 2.4 – Трехфазная обмотка цилиндрического линейного асинхронного двигателя с 2р=4, Z1 = 24, a=1 и компенсационными катушками
Для строгального станка наиболее предпочтителен вариант цилиндрического линейного асинхронного двигателя с однослойной трёхфазной обмоткой с обычным шагом из-за отсутствия краевых эффектов (за счёт конструктивных особенностей и скорости хода двигателя), относительной простоты расчёта и изготовления.
2 КОНСТРУКТОРСКАЯ ЧАСТЬ2.1 Обоснование выбора двигателя для поперечно-строгального станка
Основными конструкциями линейных асинхронных двигателей являются плоская и цилиндрическая. В свою очередь, плоский линейный асинхронный двигатель может быть одно- и двухсторонним.
Линейный асинхронный двигатель можно получить, если мысленно разрезать по образующим обычный асинхронный двигатель и развернуть в плоскости его пакеты статора и ротора. Статор линейного асинхронного двигателя называется индуктором, ротор - бегуном. Во всех линейных асинхронных двигателях длина вторичного элемента, или бегуна, превышает длину сердечника индуктора. Превышение определяется задаваемым перемещением (ходом) бегуна.
В линейных асинхронных двигателях вместо вращающегося с частотой n1=f1p образуется бегущее со скоростью ν1=2f1τ магнитное поле, которое создаётся трёхфазной обмоткой при подключении её к трёхфазной сети. Бегущее поле наводит в короткозамкнутой обмотке бегуна ЭДС, имеющую частоту f2=sf1 и вызывающую появление токов. Эти токи совместно с бегущим магнитным полем образуют силу, приводящую бегун в движение со скоростью ν=(1-s)ν1.
Из-за разомкнутости сердечников индуктора и бегуна в линейных асинхронных двигателях появляются дополнительные магнитные поля на концах сердечника индуктора (продольный краевой эффект).
Продольный краевой эффект приводит к появлению паразитных тормозных усилий, обусловленных наличием наряду с бегущей пульсирующей составляющей магнитного поля, к неравномерному распределению токов в фазах обмотки, к появлению дополнительных потерь в обмотке статора и во вторичном элементе. Для ослабления продольного краевого эффекта в линейных асинхронных двигателях применяются трёхфазные обмотки с дополнительными катушечными сторонами и компенсированными элементами в виде короткозамкнутых витков.
Если в качестве бегуна используется сплошная твердая электропроводящая полоса или жидкий металл, в них возникают токи, текущие на краях и вдоль бегуна и приводящие к появлению поперечного краевого эффекта.Поперечный краевой эффект выражается в неравномерном распределении токов по ширине вторичного элемента, что
приводит к появлению поперечных сил, действующих параллельно плоскости индуктора и стремящихся сдвинуть вторичный элемент относительно индуктора в направлении, перпендикулярном направлению движения, если продольные оси первичного и вторичного элементов смещены друг относительно друга. Кроме того, возникают поперечные силы, стремящиеся притянуть плоский вторичный элемент к индуктору. При применении цилиндрической конструкции поперечный краевой эффект исключается благодаря осевой симметрии. В тихоходных линейных асинхронных двигателях (скорость меньше 3 м/с), а так же при больших значениях 2р влияние продольного краевого эффекта на рабочие характеристики можно не учитывать.
Разомкнутость и конечная ширина магнитопроводов и возникающие из-за этого продольные и поперечные краевые эффекты вносят особенности в теорию и методику расчёта линейных асинхронных двигателей. В качестве исходных данных задаются циклограмма и график изменения силы, значение пусковой силы и пределы целесообразного изменения частоты на выходе преобразователя частоты. Исходные конструктивные параметры – это длина хода бегуна и максимально-допустимые размеры.
В основе всех разработанных моделей и методик лежит решение задачи определения магнитного поля в области расположения вторичного элемента при конечных размерах индуктора. Магнитное поле определяется в режимах холостого хода и нагрузки. Последовательно определяются магнитные индукции, ЭДС и токи, учитывающие краевые эффекты, а затем силы, зависящие от скольжения, КПД и коэффициент мощности. Расчёт при учёте конструктивных особенностей и краевых эффектов в общем случае является невозможным без упрощающих допущений. Количество и характер принимаемых допущений обуславливают вид расчётной модели линейных асинхронных двигателей.
В одномерных расчётных моделях учитывается изменение магнитного поля по одной координате, параллельной продольной или поперечной оси двигателя. В результате учитываются либо продольный, либо поперечный краевой эффект. Двухмерные модели позволяют учитывать один из краевых эффектов и изменение магнитного поля по высоте рабочего зазора. В трёхмерных моделях, когда одновременно учитываются два вида краевых эффектов, рассчитывается изменение индукции по трём координатам.
Обычными для одномерных моделей являются следующие допущения: индукторы не имеют пазов, что учитывается введением эквивалентного магнитного зазора δэ=kμkδδ; магнитная проницаемость стали сердечников индуктора и бегуна μст=∞, электропроводность σст=0, имеющее место в реальных линейных асинхронных двигателях магнитное насыщение учитывается увеличением δэ через коэффициент насыщения kμ; поперечный краевой эффект не учитывается; вторичный элемент в виде твёрдой электропроводящей полосы имеет толщину δс, и находится внутри зазора δэ; обмотки индуктора заменяются эквивалентными тонкими токовыми слоями, расположенными на внутренних поверхностях индуктора и имеющими линейную поверхностную плотность тока j1. Влияние продольного краевого эффекта зависит от свойств активных материалов и скорости вторичного элемента. В общем случае индуктивное сопротивление зависит от режима работы, что необходимо учитывать при разработке преобразователя частоты и средств автоматического управления для линейных асинхронных двигателей. Уравнения, соответствующие двух- и трёхмерным моделям, позволяют получать более точные числовые значения рассматриваемых физических величин. Однако одномерным моделям соответствуют более простые аналитические выражения с чётко выраженными параметрическими связями. Расчёты с помощью одномерных моделей являются достаточно точными для многих практических случаев.
В асинхронном двигателе регулирование скорости движения бегуна обеспечивается либо за счёт повышения скольжения, либо при использовании статического преобразователя частоты. Линейный асинхронный двигатель предназначен для повторно-кратковременных режимов работы с заданной пусковой силой. Рабочие циклы включают разгон, движение с максимальной скоростью и торможение. Рабочие циклы определённой продолжительности повторяются через заданные промежутки времени (паузы). Предполагается, что двигатель управляется с помощью преобразователя частоты, обеспечивающего как разгон при повышении частоты от fmin до fmax, так и генераторное торможение. Напряжение на выходе преобразователя частоты может регулироваться необходимым образом (закон определяется из расчёта, а затем уточняется и обеспечивается системой автоматического управления) при изменении частоты.
Цилиндрический линейных асинхронный двигатель относится к одной из двух основных конструкций линейных асинхронных двигателей и имеет предпочтение перед плоским, так как в нём исключается поперечный краевой эффект.
Бегун может иметь различные исполнения. Аналогом короткозамкнутого ротора асинхронного двигателя является бегун плоского линейного асинхронного двигателя в виде ферромагнитной полосы с пазами, в которые уложены электропроводимые стержни, замкнутые накоротко с обеих сторон шинами.
1 – сердечник индуктора (статора), 2 – обмотка индуктора, 3 – бегун (ротор), 4 – неактивная часть индуктора.
Рисунок 2.1 – Схемы плоских линейных асинхронных двигателей
1 – спинка бегуна, 2 - чередующиеся медные и стальные кольца, 3 – воздушный зазор (между индуктором и бегуном), 4 – обмотка индуктора, 5 – технологический зазор, 6 – стальной сердечник.
Рисунок 2.2 – Схема цилиндрического линейного асинхронного двигателя
В качестве бегуна плоского линейного двигателя может использоваться электропроводящая неферромагнитная шина. Двухслойных бегун состоит из стальной полосы (спинки бегуна) и электропроводящей шины. Спинка бегуна может быть выполнена сплошной или шихтованной.Цилиндрический линейный асинхронный двигатель может иметь аналогичные конструкции бегуна, например, одним из является стальная труба, на которую напрессованы вперемежку стальные кольца (зубцы) и медные кольца (пазы).
Однослойная концентрическая обмотка с расположением лобовых частей в трех плоскостях наиболее удобна в изготовлении, так как при её выполнении не возникает трудностей с размещением крайних катушечных сторон. Для его компенсации применяется компенсационная катушка с числом витков Wк. Ток Iк этой катушки должен изменятся в фазе с током фазы С обмотки, и поэтому она соединяется последовательно с данной фазой. Применение компенсационных катушек приводит к увеличению полного сопротивления фазы С и вызывает нежелательную асимметрию токов фаз.
Рисунок 2.3 – Трехфазная однослойная трехплоскостная концентрическая обмотка с 2р=4, Z1=24, q=2
Двухслойные обмотки более предпочтительны для использования в линейных двигателях, чем однослойные, по своим электромагнитным свойствам. Прежде всего это связано с тем, что токи в их лобовых частях направлены встречно и поэтому создают более слабый пульсирующий поток. Однако при укладке катушек, соединяемых по правилам образования двухслойных обмоток обычных асинхронных двигателей, в статоре линейных асинхронных двигателей остаются полупустые пазы. В результате в двигателях с обмоткой, выполненной по указанной схеме, поле на концах индуктора будет ослаблено, что приведёт к уменьшению силы, развиваемой в активной зоне.
Для ликвидации этого недостатка полупустые пазы заполняют дополнительными катушечными сторонами с токами, равными токам фаз.
Обмотки цилиндрических линейных асинхронных двигателей состоят из кольцевых катушек, каждая из которых соответствует одной катушечной стороне обмотки. Обмотки можно выполнять с сокращённым шагом, если в каждый паз уложить две катушки и сместить электрически фазные зоны двух слоев катушек друг относительно друга, однако применение таких обмоток серьёзно усложняет конструкцию двигателя и процедуру изготовления. В результате выигрыш от улучшения кривой поля в зазоре не компенсирует повышенных затрат на производство.
Полюсное деление выбирается минимально возможным по конструктивным соображениям: не может быть взята ширина зубцов меньше, чем 1-2мм, пазов – менее 3 мм. При этом τmin=m1qt1min=12мм.
Рисунок 2.4 – Трехфазная обмотка цилиндрического линейного асинхронного двигателя с 2р=4, Z1 = 24, a=1 и компенсационными катушками
Для строгального станка наиболее предпочтителен вариант цилиндрического линейного асинхронного двигателя с однослойной трёхфазной обмоткой с обычным шагом из-за отсутствия краевых эффектов (за счёт конструктивных особенностей и скорости хода двигателя), относительной простоты расчёта и изготовления.