Файл: Учебное пособие для выполнения курсового проекта по дисциплине Детали машин и основы конструирования.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.11.2023
Просмотров: 77
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
4. Проверка подшипников на долговечность
4.1. Определение реакций в опорах
Вектор силы полного давления зуба шестерни на зуб ведомого колеса Fnнаправлен по нормали к образующей поверхности зуба [7, с. 306]. Длякосозубой передачи этот вектор (рис.11)представляет собой диагональ параллелепипеда, сторонами которого являются три составляющие силы по трем взаимно перпендикулярным направлениям: Fa, FrиFt.В прямозубой передаче осевая сила отсутствует, и сила давления на колесо – это диагональ параллелограмма со сторонамиFrи Ft.
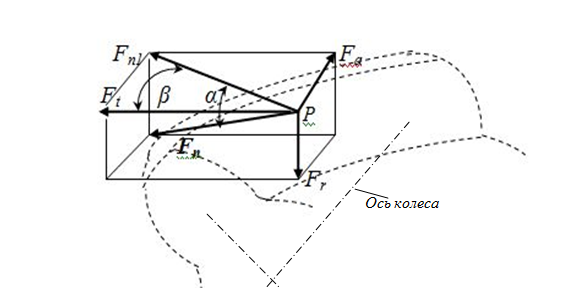
Рис. 11. Силы, действующие в зацеплении косозубой передачи.
Окружная сила: Ft= 2Т/d,
где Т – крутящий момент, d – диаметр делительной окружности
зубчатого колеса.
Осевая сила Fa = Ft·tgβ.
Радиальная сила Fr=Ft·tgα /cosβ.
Определение реакций опор цилиндрической косозубой передачи рассмотрим на примере быстроходного вала. Для этого необходимо построить расчетную схему, как показано на рис. 12.
Реакции находим, пользуясь обычными уравнениями статического равновесия, известными из курса теоретической механики. Изобразив систему координат, реакции раскладываем на составляющие в горизонтальной плоскости XOZив вертикальной плоскости УOZ.
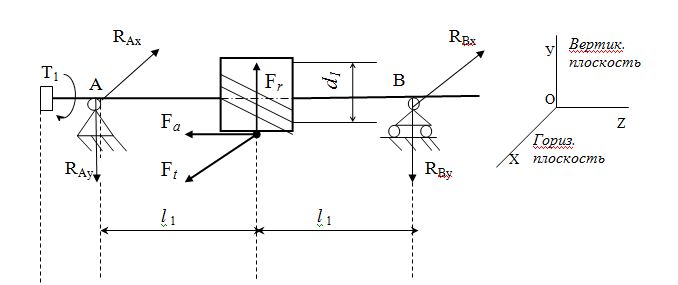
Рис. 12.Расчетная схема для определения реакций в опорах
Уравнения равновесия в горизонтальной плоскости
ΣMB = -RAX∙2l1 +Ft∙l1 = 0; RAX = Ft/2.
ΣX = -RAX - RBX + Ft= 0; RBX = Ft - RAX = Ft /2.
Уравнения равновесия в вертикальной плоскости
ΣMB = RАу∙2l1 -Fа∙d1/2 - Fr∙l1 = 0; RАу=Fr/2 + Fа∙d1 / 4
l1.
ΣMА = - RВу∙2l1 -Fа∙d1/2 + Fr∙l1 = 0; RВу=Fr/2 - Fа∙d1 / 4l1 .
Равнодействующие реакции находим, как геометрическую сумму:
В нашем примере (опоры расположены симметрично) реакциив горизонтальной плоскости равны, а в вертикальной – более нагружена опораА, в сторону которой направлена осевая сила. При несимметричном расположении опор от полюса зацепления могут быть другие соотношения.
4.2. Расчетная долговечность подшипников
Расчет производим по быстроходному валу. Требуемая долговечность подшипника в часах Lhопределяется по эквивалентной нагрузке Рэкв и должна находиться в пределах [Lh]min≤Lh≤[Lh]max. Для подшипниковых опор зубчатых передач эти пределы соответствуют 10000…36000 часов работы.
1) . Определяем эквивалентную нагрузку Рэквпо формуле [2, с.212]
Рэкв= (V∙X∙Rr+Y∙Ra)∙KБ∙КТ ,
где V – коэффициент, учитывающий вращение колец: при вращении внутреннего кольца V = 1, при вращении наружного V = 1,2.
X ,Y – коэффициенты радиальной и осевой нагрузки.
- для прямозубой передачи: X= 1; Y = 0;
- для косозубой передачи: X=0,56. Для того чтобы найти значение Y следует вычислить соотношение между осевой и радиальной силой по формуле
 , после чего принять Y из таблицы [3, с.195 - 201]
, после чего принять Y из таблицы [3, с.195 - 201]| е | 0,19 | 0,22 | 0,26 | 0,28 | 0,30 | 0,34 | 0,38 | 0,42 | 0,44 |
| Y | 2,30 | 1,99 | 1,71 | 1,55 | 1,45 | 1,31 | 1,15 | 1,04 | 1,00 |
KБ – коэффициент динамичности[1,с.115-116].
Для зубчатых передач, редукторов, механизмов поворота и передвижения крановых тележек и т.п. (умеренные толчки, кратковременные перегрузки до 150% от номинальных, вибрации) KБ = 1,3…1,5.
КТ – температурный коэффициент [1,с.115]. Принимается в зависимости от рабочей температуры подшипника. Если tраб ≤ 100о,то КТ = 1,0.
Rr - радиальная нагрузка, кН; принимается равной наибольшей величине реакции в опорах (RAилиRBв зависимости от того, какой из подшипников нагружен больше).
Если передача прямозубая и опоры расположены симметрично, тоRr = RA=RB.
Ra – осевая нагрузка на подшипники, кН. В прямозубых передачах Ra = 0;
в косозубых передачах Ra = Fa.
2). Определяем долговечность подшипника в миллионах оборотов
 , гдеС–динамическая грузоподъемность по каталогу, кН;
, гдеС–динамическая грузоподъемность по каталогу, кН;р – показатель степени: для шарикоподшипников р= 3;
для роликоподшипников р = 10/3.
3). Номинальная долговечность в часах
 , где n – частота вращения кольца подшипника
, где n – частота вращения кольца подшипника (число оборотов вала-шестерни).
Если расчетная долговечность подшипника меньше допустимого значения, то следует перейти к более тяжелой серии (например, от легкой к средней). Если долговечность больше максимального значения, то подшипник недогружен; рекомендуется по возможности перейти к более легкой серии.
Если вычисленный ресурс (долговечность) подшипников шариковых и радиальных с цилиндрическими роликами значительно выше, чем каталожное значение, даже для легкой серии, то диаметр вала не следует уменьшать, т.к. он определен из расчета на прочность.
Расчетная долговечность в этом случае будет превышать регламентированную.
5. Проверочный расчет валов и соединений
5.1.Построение эпюр изгибающих и крутящих моментов. Определение эквивалентного момента.
Под действием внешних сил, реакций в опорах и моментах в сечениях вала возникают внутренние крутящие и изгибающие моменты. Таким образом, вал испытывает сложную деформацию – изгиб с кручением. Как известно из курса «Сопротивление материалов» расчет вала на прочность можно выполнять на основании принципа независимости действия сил. В этом случае необходимо определить напряжения от каждой силы или момента, после чего рассчитать эквивалентный момент, согласно третьей теории прочности [6, с.275-276].

;
Мx – изгибающий момент в горизонтальной плоскости;
Мy - изгибающий момент в вертикальной плоскости;
Т – крутящий момент.
Далее можно вычислить эквивалентное напряжение для круглых валов
Ϭэкв= Мэкв/ W ≤ [Ϭ],
где W – осевой момент сопротивления изгибу.
[Ϭ] – допускаемое напряжение на изгиб.
При этом расчет ведут как для изгиба (без кручения), но не по изгибающему,
а по эквивалентному моменту.
Для определения эквивалентного момента строим эпюры внутренних крутящих моментов, а также эпюры изгибающих моментов в горизонтальной и вертикальной плоскости(рис.13). Пример дан для косозубой передачи; если в Вашем индивидуальном задании передача прямозубая, то обратите внимание на то, какие силы действуют в зацеплении, есть ли там осевая сила.
При построении эпюр следует использовать свои расчетные значения, а не копировать рисунок, приведенный в методических указаниях !!!
1). Вал-шестерня.
На входном участке вала от полумуфты до полюса зацепления действует постоянный вращающий момент
Т1. При зацеплении шестерни с зубчатым колесом крутящий момент передается на колесо, и далее посредством шпоночного соединения – на тихоходный вал. Поэтому внутренний крутящий момент на участке от полюса зацепления до опорыВравен нулю.
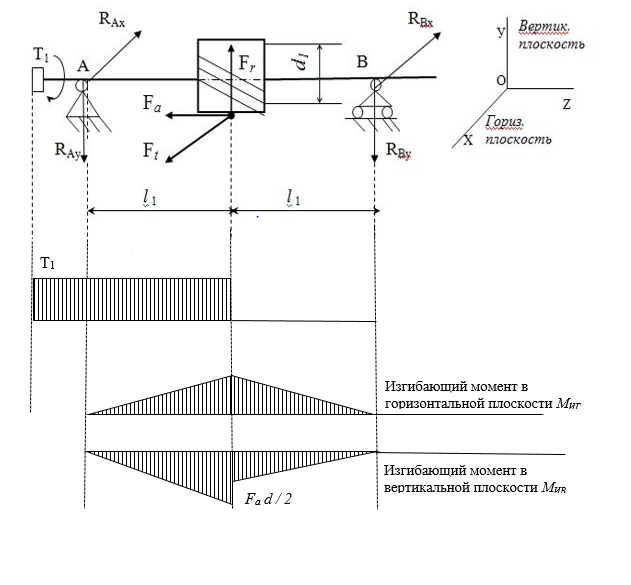
Рис.13. Построение эпюр крутящего и изгибающих моментов на быстроходном валу
Изгибающий момент в горизонтальной плоскости:
- на участке от опорыА до точки зацепления (слева от сечения) эпюра изгибающего момента строится по уравнению:
МИГ =RAх ∙ z ; где 0 ≤ z≤ l1
Приz = 0 МИГ =0;приz = l1МИГ= Ft∙l1 / 2.
-на участке от опорыВ до точки зацепления (справа от сечения):
МИГ=RВх∙ z ; где 0 ≤ z ≤ l1
Приz = 0 МИГ =0;приz = l1МИГ= Ft∙l1 / 2.
Изгибающий момент в вертикальной плоскости:
- на участке от опоры А до точки зацепления (слева от сечения)
МИВ = RAу ∙ z ;где 0 ≤ z ≤ l1
Приz = 0 МИВ =0; при z = l1МИВ= Fr∙l1/2 +Fа∙ d1 / 4 .
-на участке от опорыВ до точки зацепления (справа от сечения):
МИВ = RВу∙ z;где 0 ≤ z ≤ l1
Приz = 0 МИВ =0; при z = l1МИВ= Fr∙l1/2 - Fа∙ d1 / 4 .
2). Тихоходный вал
Внутренний крутящий момент на участке от опоры А до полюса зацепления равен нулю. В точке зацепления момент с шестерни передается на колесо, и далее на вал действует постоянный крутящий момент Т2 до опоры В.
Определяем реакции в опорах:
Уравнения равновесия в горизонтальной плоскости
ΣMB = RAX∙2l- Ft∙l = 0; RAX = Ft/2.
ΣX = -RAX - RBX + Ft= 0; RBX = Ft - RAX = Ft /2.
Уравнения равновесия в вертикальной плоскости