ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 03.12.2023
Просмотров: 197
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Робототехническую систему, особенно учитывая необходимость междисциплинарных решений в ее разработке, в одиночку качественно сделать почти невозможно. Это, безусловно, командная работа, которая является важным условием развития широкого комплекса личностных качеств, объединенных в две большие группы – «hard skills» и «soft skills».
Робототехника в школе является эффективным средством п р о -е к т н о - о р и е н т и р о в а н н о г о о б у ч е н и я , которое оказывает влияние на развитие всего комплекса личностных качеств учащихся. Проектная деятельность по робототехнике при обучении физике рассматривается в п. 2.4.
Степень вовлечённости школьников в процесс освоения робототехники определяется уровнем обучения (базовый, расширенный, углубленный) (см. п. 1.4). Данная степень определяет образовательный эффект занятий робото-техникой при обучении физике.
2.4. Применение робототехники в учебной, исследовательской и проектной деятельности учащихся по физике
Как отмечалось ранее, образовательная робототехника как средство обучения существенно расширяет предметную основу формирования технических знаний учащихся, организации их учебной технической деятельности и освоения технических умений. В настоящем исследовании мы выделяем четыре вида технической деятельности учащихся в области образовательной робототехники: учебную, исследовательскую, проектную и проектно-исследовательскую.
Учебная деятельность связывается в настоящем исследовании с выполнением школьниками лабораторных заданий на готовых роботизированных установках (установках для РТ-экспериментов, РТ-объектов техники различного назначения). Учащимся для выполнения заданий предлагаются инструктивные материалы (см. подробнее п. 2.5).
Исследовательская деятельность соотносится с применением роботизированных установок в учебно-исследовательском физическом эксперименте. В этом случае школьники тоже работают на готовых роботизированных установках. Перед учащимися ставятся задачи изучения устройства и функционала РТ-установки, а также планирование и проведение физического исследовательского эксперимента с ее применением.
Проектная деятельность – это деятельность по созданию конкретной модели робота. Заранее известный результат - это главный критерий отличия проектной деятельности от исследовательской, для которой конечный результат не очевиден. Проектное задание формулирует учитель. В задании определяется назначение модели робота и формулируются требования к его функционалу. Назначение модели должно быть связано, так или иначе, с демонстрацией технических приложений физики как области научного знания. Про
ект в частности может быть связан с разработкой установки для физическо-
го РТ-эксперимента. Учащиеся могут воспользоваться предложенным им руководством к выполнению проекта. В другом случае им могут быть даны лишь общие рекомендации к работе. Это зависит от уровня готовности школьников к самостоятельной проектной деятельности. Если перед учащимися формулируется лишь общая идея проекта (разработка модели робота заданного назначения) и конечный его результат не вполне очевиден, то в этом случае их деятельность должна быть определена как проектно-исследовательская. В этом случае учащиеся самостоятельно решают весь комплекс задач по созданию модели робота,
Каждый из видов деятельности должен быть обеспечен соответствующим дидактическим сопровождением (подробнее см. п. 2.4.). Рассмотрим особенности проектной и проектно-исследовательской деятельности учащихся с применением робототехники в учебном процессе по физике.
Теоретико-методологическую основу применения метода проектов в настоящем исследовании составили труды по организации проектной деятельности учащихся (Дж. Дьюи, В. X. Килпатрик, А. В. Леонтовича, А. Ю. Пентина, Е.С. Полат, С. Т. Шацкого и др.). При применении метода проектов в настоящем исследовании использовались результаты диссертационных работ В.Б. Гундырева [33], О.Ю. Дергуновой [36], Н.В. Матяш [91], Н.Ю. Пахомо-вой [122], И.Д. Чечель [172], и др.
Проектная деятельность по робототехнике обладает особым комплексным образовательным воздействием, обеспечивающим в равной степени и обучение, и развитие, и воспитание личности учащегося. Работа над проектами по робототехнике может быть организована как в рамках учебного процесса по предмету, так и во внеурочное время. Проектную деятельность целесообразно связывать с проведением школьных, городских региональных и всероссийских робототехнических конкурсов и олимпиад, в которых школьники участвуют в массовом порядке и с большим энтузиазмом. Участие и победы в конкурсном и соревновательном движениях являются серьезными
стимулами к организации робототехнического творчества учащихся.
Проектная деятельность по образовательной робототехнике в учебном процессе по физике может быть направлена:
1) на создание нового робота или модернизацию имеющегося (конструктивные, элементные и программные обновления) для решения исследовательской или прикладной учебной задачи на базе наборов по робототехнике от конкретного производителя;
2) создание нового робота или модернизацию имеющегося для решения исследовательской или прикладной учебной задачи на основе: а) самостоятельной разработки новых датчиков и других систем робота, расширяющих возможности его практического применения; б) использования робота совместно с другими техническими системами, в том числе оборудования школьного кабинета физики.
Фактически это три вида учебных проектов, основанием для выделения которых являются цель проекта и особенности технического обеспечения его выполнения.
Примеры проектов первого и второго видов. Одним из таких примеров является модель роботизированного физического эксперимента по исследованию закономерностей падения тел, созданная учащимися на базе робототехнического конструктора Lego Mindstorms EV3. Экспериментальная установка показана на рисунке 8, а. С ее помощью можно определить ускорение падения тела, доказать, что это движение является равноускоренным, показать влияние на процесс различных факторов или таковых закономерностей. Эксперимент по времени длится не более минуты. При выполнении эксперимента роботом фиксируются: 1) значения ускорений падения нескольких одинаковых шариков и среднее значение ускорения; 2) время прохождения шариками расстояний, относящихся по величине как ряд нечетных чисел (1:3:5). Как только все шарики будут сброшены, робот подает сигнал о необходимости пополнения числа исследуемых объектов, запроса об изменении условий проведений эксперимента или его завершении. В ходе исследования можно менять условия постановки опыта: высоту падения, характеристики падающих тел (объем, массу и даже форму). Результаты эксперимента выводятся на экран микропроцессора.
После создания учащимися первой версии данного роботизированного эксперимента (рис.8, а) им могут быть предложены задания по модернизации конструкции робота-экспериментатора, например: 1) замена в экспериментальной установке трех стационарных датчиков одним подвижным; 2) обеспечение автоматической доставки падающих шариков в устройство для их сброса; 3) реализация супервизорного управления с целью автоматический замены объектов исследования – падающих тел. Вариант выполнения первого задания представлен на рисунке 8, б.


а б
Рис. 8. Модель роботизированной экспериментальной установки для исследования явления свободного падения: а) с тремя стационарными датчиками, б) с одним подвижным датчиком (М.Г. Ершов [195])
Рассмотрим еще один из учебных проектов, связанный с разработкой РТ-установки на основе набора LEGO Mindstorms EV3 для изучения законов сухого трения. На рисунке 9 представлена установка для проведения данного эксперимента. Отметим, что это роботизированный эксперимент с автономным управлением.
Для проведения эксперимента на столе размещается дорожка из комбинации поверхностей различного рода и сани с грузами. Сани приводятся в движение с помощью нити, прикрепленной к электродвигателю через датчик силы. На санях установлен датчик света, контролирующий смену участков движения. Имеются устройства (преграды) для последовательного сбрасывания грузов с саней (в ходе эксперимента технологически проще уменьшать массу тележки, а не увеличивать). В перемещении саней по комбинированной поверхности выделены четыре этапа. Это движения: 1) по поверхности первого вида с прорезью для обеспечения малой площади соприкосновения, 2) по сплошной поверхности этого же вида, 3) по сплошным поверхностям второго и третьего видов; 4) по поверхности третьего вида с последовательным уменьшением нагрузки (силы нормального давления).
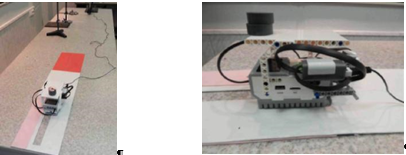
Рис. 9. Установка для изучения законов сухого трения (М.Г. Ершов [130])
Программа управления экспериментом настроена так, что на первом этапе эксперимента измеряется сила трения скольжения по трем различным поверхностям (при этом осуществляется автоматическое усреднение силы трения на каждом из этапов движения). На втором этапе измеряются значения силы трения при последовательном сбрасывании грузов с тележки (т.е. при уменьшении силы нормального давления). Датчик света фиксирует переход тележки на каждый новый этап движения и запускает необходимые обновления программы управления экспериментом. В конце пути сани автоматически оста
навливаются. На экран микропроцессора в реальном времени выводятся данные, демонстрирующие значения силы трения на каждом этапе движения. Их анализ позволяет установить следующие факты: 1) независимость силы трения скольжения от площади поверхности, 2) зависимость силы трения скольжения от рода поверхности, 3) зависимость силы трения скольжения от силы нормального давления.
Модернизация эксперимента может быть связана с выполнением следующих заданий: 1) обновление программы управления экспериментом с целью фиксации датчиком силы в начале движения (в момент сдвига) значения силы трения покоя для доказательства превышения силы трения покоя над силой трения скольжения для одной и той же поверхности при одинаковой силе нормального давления; 2) возвращение системы в исходное состояние для проведения повторного эксперимента, 3) поиск нового (более надежного) способа изменения силы нормального давления.
Как видно, для выполнения этих проектов не используется специальное дополнительное оборудование. Необходимы лишь простейшие вспомогательные средства и материалы (штативы, подставки, грузы, шарики, шнуры и т.п.).
Проекты третьего вида. Эти проекты принципиально отличаются от предыдущих. При их выполнении может понадобиться оборудование школьного кабинета физики, кабинета технологии, а также домашняя бытовая техника, а в ряде случаев специальные инструменты. Благодаря применению этих дополнительных средств могут быть решены более сложные, в том числе оригинальные технические задачи. Рассмотрим примеры проектов этого вида.
М о д е л ь м а г н и т н о й п е р е д а ч и: магнитная муфта (одна из конструкций этого проекта была представлена в п. 2.2, рис. 7). Как отмечалось ранее, работа магнитной муфты обеспечивается взаимодействием двух магнитных шестерёнок. При их сближении возникает «магнитное сцепление», в результате чего вращение одной шестеренки передается другой. Учащиеся не просто разработали данный проект. На его основе была создана лабораторная работа по изучению магнитного взаимодействия. В лабораторной установке ведомая шестерёнка была закреплена на валу, вращающемся в магнитных подшипниках (рис. 7, п. 2.2). Вал свободно извлекался из конструкции, что облегчало ее сборку и демонтаж. В качестве крепёжных узлов использовались детали из пластика, которые были самостоятельно изготовлены учащимся. Ведущая шестерня устанавливалась на подвижную подставку, которая обеспечивала ее приближение и удаление от ведомой магнитной шестерни. Перемещение подставки осуществилось с помощью электродвигателя, который управлялся компьютерной программой. Программно регулировалась скорость вращения ведущей шестерёнки. Увеличение и уменьшение скорости вращения могло обеспечиваться либо по времени, либо с помощью ручного управления (за счет срабатывания датчика расстояния при приближении к нему руки). Следует отметить, что при увеличении скорости вра
Робототехника в школе является эффективным средством п р о -е к т н о - о р и е н т и р о в а н н о г о о б у ч е н и я , которое оказывает влияние на развитие всего комплекса личностных качеств учащихся. Проектная деятельность по робототехнике при обучении физике рассматривается в п. 2.4.
Степень вовлечённости школьников в процесс освоения робототехники определяется уровнем обучения (базовый, расширенный, углубленный) (см. п. 1.4). Данная степень определяет образовательный эффект занятий робото-техникой при обучении физике.
2.4. Применение робототехники в учебной, исследовательской и проектной деятельности учащихся по физике
Как отмечалось ранее, образовательная робототехника как средство обучения существенно расширяет предметную основу формирования технических знаний учащихся, организации их учебной технической деятельности и освоения технических умений. В настоящем исследовании мы выделяем четыре вида технической деятельности учащихся в области образовательной робототехники: учебную, исследовательскую, проектную и проектно-исследовательскую.
Учебная деятельность связывается в настоящем исследовании с выполнением школьниками лабораторных заданий на готовых роботизированных установках (установках для РТ-экспериментов, РТ-объектов техники различного назначения). Учащимся для выполнения заданий предлагаются инструктивные материалы (см. подробнее п. 2.5).
Исследовательская деятельность соотносится с применением роботизированных установок в учебно-исследовательском физическом эксперименте. В этом случае школьники тоже работают на готовых роботизированных установках. Перед учащимися ставятся задачи изучения устройства и функционала РТ-установки, а также планирование и проведение физического исследовательского эксперимента с ее применением.
Проектная деятельность – это деятельность по созданию конкретной модели робота. Заранее известный результат - это главный критерий отличия проектной деятельности от исследовательской, для которой конечный результат не очевиден. Проектное задание формулирует учитель. В задании определяется назначение модели робота и формулируются требования к его функционалу. Назначение модели должно быть связано, так или иначе, с демонстрацией технических приложений физики как области научного знания. Про
ект в частности может быть связан с разработкой установки для физическо-
го РТ-эксперимента. Учащиеся могут воспользоваться предложенным им руководством к выполнению проекта. В другом случае им могут быть даны лишь общие рекомендации к работе. Это зависит от уровня готовности школьников к самостоятельной проектной деятельности. Если перед учащимися формулируется лишь общая идея проекта (разработка модели робота заданного назначения) и конечный его результат не вполне очевиден, то в этом случае их деятельность должна быть определена как проектно-исследовательская. В этом случае учащиеся самостоятельно решают весь комплекс задач по созданию модели робота,
Каждый из видов деятельности должен быть обеспечен соответствующим дидактическим сопровождением (подробнее см. п. 2.4.). Рассмотрим особенности проектной и проектно-исследовательской деятельности учащихся с применением робототехники в учебном процессе по физике.
Теоретико-методологическую основу применения метода проектов в настоящем исследовании составили труды по организации проектной деятельности учащихся (Дж. Дьюи, В. X. Килпатрик, А. В. Леонтовича, А. Ю. Пентина, Е.С. Полат, С. Т. Шацкого и др.). При применении метода проектов в настоящем исследовании использовались результаты диссертационных работ В.Б. Гундырева [33], О.Ю. Дергуновой [36], Н.В. Матяш [91], Н.Ю. Пахомо-вой [122], И.Д. Чечель [172], и др.
Проектная деятельность по робототехнике обладает особым комплексным образовательным воздействием, обеспечивающим в равной степени и обучение, и развитие, и воспитание личности учащегося. Работа над проектами по робототехнике может быть организована как в рамках учебного процесса по предмету, так и во внеурочное время. Проектную деятельность целесообразно связывать с проведением школьных, городских региональных и всероссийских робототехнических конкурсов и олимпиад, в которых школьники участвуют в массовом порядке и с большим энтузиазмом. Участие и победы в конкурсном и соревновательном движениях являются серьезными
стимулами к организации робототехнического творчества учащихся.
Проектная деятельность по образовательной робототехнике в учебном процессе по физике может быть направлена:
1) на создание нового робота или модернизацию имеющегося (конструктивные, элементные и программные обновления) для решения исследовательской или прикладной учебной задачи на базе наборов по робототехнике от конкретного производителя;
2) создание нового робота или модернизацию имеющегося для решения исследовательской или прикладной учебной задачи на основе: а) самостоятельной разработки новых датчиков и других систем робота, расширяющих возможности его практического применения; б) использования робота совместно с другими техническими системами, в том числе оборудования школьного кабинета физики.
Фактически это три вида учебных проектов, основанием для выделения которых являются цель проекта и особенности технического обеспечения его выполнения.
Примеры проектов первого и второго видов. Одним из таких примеров является модель роботизированного физического эксперимента по исследованию закономерностей падения тел, созданная учащимися на базе робототехнического конструктора Lego Mindstorms EV3. Экспериментальная установка показана на рисунке 8, а. С ее помощью можно определить ускорение падения тела, доказать, что это движение является равноускоренным, показать влияние на процесс различных факторов или таковых закономерностей. Эксперимент по времени длится не более минуты. При выполнении эксперимента роботом фиксируются: 1) значения ускорений падения нескольких одинаковых шариков и среднее значение ускорения; 2) время прохождения шариками расстояний, относящихся по величине как ряд нечетных чисел (1:3:5). Как только все шарики будут сброшены, робот подает сигнал о необходимости пополнения числа исследуемых объектов, запроса об изменении условий проведений эксперимента или его завершении. В ходе исследования можно менять условия постановки опыта: высоту падения, характеристики падающих тел (объем, массу и даже форму). Результаты эксперимента выводятся на экран микропроцессора.
После создания учащимися первой версии данного роботизированного эксперимента (рис.8, а) им могут быть предложены задания по модернизации конструкции робота-экспериментатора, например: 1) замена в экспериментальной установке трех стационарных датчиков одним подвижным; 2) обеспечение автоматической доставки падающих шариков в устройство для их сброса; 3) реализация супервизорного управления с целью автоматический замены объектов исследования – падающих тел. Вариант выполнения первого задания представлен на рисунке 8, б.
а б
Рис. 8. Модель роботизированной экспериментальной установки для исследования явления свободного падения: а) с тремя стационарными датчиками, б) с одним подвижным датчиком (М.Г. Ершов [195])
Рассмотрим еще один из учебных проектов, связанный с разработкой РТ-установки на основе набора LEGO Mindstorms EV3 для изучения законов сухого трения. На рисунке 9 представлена установка для проведения данного эксперимента. Отметим, что это роботизированный эксперимент с автономным управлением.
Для проведения эксперимента на столе размещается дорожка из комбинации поверхностей различного рода и сани с грузами. Сани приводятся в движение с помощью нити, прикрепленной к электродвигателю через датчик силы. На санях установлен датчик света, контролирующий смену участков движения. Имеются устройства (преграды) для последовательного сбрасывания грузов с саней (в ходе эксперимента технологически проще уменьшать массу тележки, а не увеличивать). В перемещении саней по комбинированной поверхности выделены четыре этапа. Это движения: 1) по поверхности первого вида с прорезью для обеспечения малой площади соприкосновения, 2) по сплошной поверхности этого же вида, 3) по сплошным поверхностям второго и третьего видов; 4) по поверхности третьего вида с последовательным уменьшением нагрузки (силы нормального давления).
Рис. 9. Установка для изучения законов сухого трения (М.Г. Ершов [130])
Программа управления экспериментом настроена так, что на первом этапе эксперимента измеряется сила трения скольжения по трем различным поверхностям (при этом осуществляется автоматическое усреднение силы трения на каждом из этапов движения). На втором этапе измеряются значения силы трения при последовательном сбрасывании грузов с тележки (т.е. при уменьшении силы нормального давления). Датчик света фиксирует переход тележки на каждый новый этап движения и запускает необходимые обновления программы управления экспериментом. В конце пути сани автоматически оста
навливаются. На экран микропроцессора в реальном времени выводятся данные, демонстрирующие значения силы трения на каждом этапе движения. Их анализ позволяет установить следующие факты: 1) независимость силы трения скольжения от площади поверхности, 2) зависимость силы трения скольжения от рода поверхности, 3) зависимость силы трения скольжения от силы нормального давления.
Модернизация эксперимента может быть связана с выполнением следующих заданий: 1) обновление программы управления экспериментом с целью фиксации датчиком силы в начале движения (в момент сдвига) значения силы трения покоя для доказательства превышения силы трения покоя над силой трения скольжения для одной и той же поверхности при одинаковой силе нормального давления; 2) возвращение системы в исходное состояние для проведения повторного эксперимента, 3) поиск нового (более надежного) способа изменения силы нормального давления.
Как видно, для выполнения этих проектов не используется специальное дополнительное оборудование. Необходимы лишь простейшие вспомогательные средства и материалы (штативы, подставки, грузы, шарики, шнуры и т.п.).
Проекты третьего вида. Эти проекты принципиально отличаются от предыдущих. При их выполнении может понадобиться оборудование школьного кабинета физики, кабинета технологии, а также домашняя бытовая техника, а в ряде случаев специальные инструменты. Благодаря применению этих дополнительных средств могут быть решены более сложные, в том числе оригинальные технические задачи. Рассмотрим примеры проектов этого вида.
М о д е л ь м а г н и т н о й п е р е д а ч и: магнитная муфта (одна из конструкций этого проекта была представлена в п. 2.2, рис. 7). Как отмечалось ранее, работа магнитной муфты обеспечивается взаимодействием двух магнитных шестерёнок. При их сближении возникает «магнитное сцепление», в результате чего вращение одной шестеренки передается другой. Учащиеся не просто разработали данный проект. На его основе была создана лабораторная работа по изучению магнитного взаимодействия. В лабораторной установке ведомая шестерёнка была закреплена на валу, вращающемся в магнитных подшипниках (рис. 7, п. 2.2). Вал свободно извлекался из конструкции, что облегчало ее сборку и демонтаж. В качестве крепёжных узлов использовались детали из пластика, которые были самостоятельно изготовлены учащимся. Ведущая шестерня устанавливалась на подвижную подставку, которая обеспечивала ее приближение и удаление от ведомой магнитной шестерни. Перемещение подставки осуществилось с помощью электродвигателя, который управлялся компьютерной программой. Программно регулировалась скорость вращения ведущей шестерёнки. Увеличение и уменьшение скорости вращения могло обеспечиваться либо по времени, либо с помощью ручного управления (за счет срабатывания датчика расстояния при приближении к нему руки). Следует отметить, что при увеличении скорости вра