Файл: Анализ и диагностирование работы однорежимного регулятора частоты вращения вала дизеля р11М.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.12.2023
Просмотров: 87
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
и 5 он может удерживаться здесь только при большем значении центробежной силы, а, следовательно, и частоты вращения.
Таким образом, рассмотренный регулятор является статическим, поддерживая заданную частоту вращения со статической неравномерностью.
Степень неравномерности АСР с этим регулятором можно устанавливать в пределах 2-6% изменением приведенной жесткости пружин при изменении действия дополнительной пружины 5. С уменьшением действия пружины 5 (смещение опоры 4 ближе к оси рычага 6) неравномерность уменьшается.
Снижение статической неравномерности АСР приводит к уменьшению ее динамической устойчивости.
Для повышения динамической устойчивости АСР прикрывают иглу 9 катаракта (увеличивают время Тк катаракта). Полное закрытие иглы катаракта или заклинивание его поршня в цилиндре приводит к значительному росту статической неравномерности АСР вследствие непрерывной работы пружины 7 при различных нагрузках. Раскачивание АСР в динамике может возникнуть вследствие заедания тяги ТНВД. Признаком заедания является движение тяги рывками, а также непрерывное появление и исчезновение зазора a t между опорной гайкой тяги 10 и рычагом 6,
Для настройки регулятора на заданную частоту вращения изменяют предварительное натяжение пружины 3 вращением маховика 1, по резьбовому штоку которого перемещается опорная гайка 2.
Для остановки двигателя разворачивают рычаг 11, который, выбрав зазор α2 через упор воздействует непосредственно на тягу ТНВД. Наличие опорной пружины 12 позволяет отводить тягу в нулевое положение, не оказывая влияние на элементы регулятора.
На κ (орган управления двигателем) можно воздействовать с помощью автоматического регулятора, измеряющего различные параметры, характеризующие неустановившиеся режимы его работы.
Прежде всего, можно измерить изменение самого регулируемого параметра, т. е. φ, и в зависимости от его значения воздействовать на κ. Такой принцип регулирования получил наименование принципа Ползунова—Уатта. Уравнения этих регуляторов, связывающих φ и κ, в самом простейшем случае можно представить в виде
δz η=φ
где δz - коэффициент пропорциональности; η = ∆z/z0- безразмерное перемещение муфты 3 регулятора
Принцип Ползунова—Уатта. Уравнение такого регулятора в упрощенном представлении можно записать в виде:
 δz η=φ;
δz η=φ; 
Координаты η и κ в данной системе являются внутренними и могут быть исключены. Это приводит к дифференциальному уравнению:
Общий интеграл этого уравнения при единичном ступенчатом возмущении, когда θ∂ = 1,0 и α∂ = -1,0 (при сбросе нагрузки), имеет вид:
Сопоставление полученного общего интеграла САР с общим интегралом двигателя показывает, что
двигателя показывает, что
(1 + κдδz)/Tдδz > κд/Тд.
Следовательно, принцип Ползунова- Уатта обеспечивает повышение устойчивости и качества работы системы. При установке на двигателе автоматического регулятора, действующего на основе принципа Ползунова- Уатта, переходный процесс может быть сходящимся, т.е.:
при t→ + ∞ величина
φ → δz/(1 + κдδz)
а система автоматического регулирования - устойчивой (даже при κд <0), когда сам двигатель неустойчив, если при этом 1 + κдδz> 0.
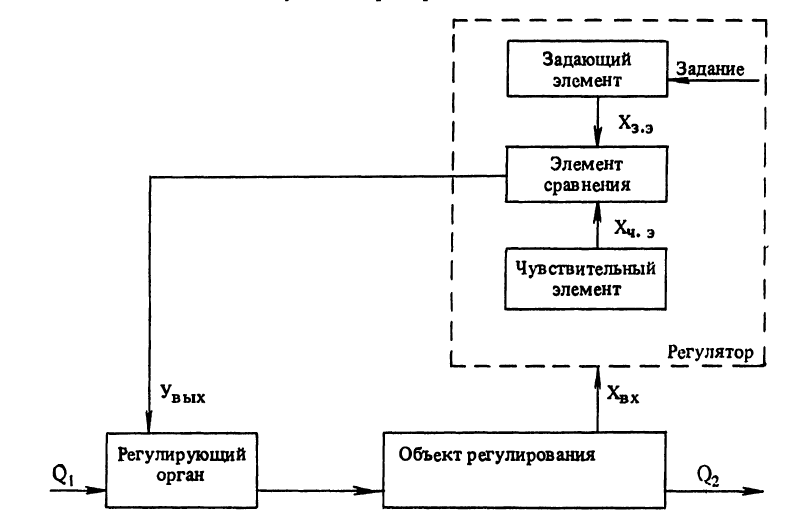
Структурная схема системы прямого автоматического регулирования система прямого автоматического регулирования состоит из объекта регулирования и регулятора прямого действия. Регулятор частоты вращения включает три основных элемента: чувствительный элемент, элемент сравнения и задающий элемент.
Как видно из рисунка, регулятор получает входной сигнал Хвх (частота вращения коленчатого вала двигателя) и в зависимости от него вырабатывает выходной сигнал Увых (перемещение регулирующего органа -рейки топливных насосов).
Чувствительный элемент регулятора непрерывно замеряет параметр объекта регулирования - частоту вращения коленчатого вала и преобразует величину замеряемого параметра в выходной сигнал чувствительного элемента X ч. э. В регуляторах частоты вращения прямого действия выходной сигнал является механическим, он получается в виде перемещения. Зависимость между входным и выходным сигналами чувствительного элемента, как правило, пропорциональна.
Задающий элемент регулятора подает постоянный сигнал Хз.э на элемент сравнения. Величина этого сигнала соответствует величине выходного сигнала чувствительного элемента Хч. э, при которой регулируемый параметр (частота вращения) является заданным. Этот сигнал задающего элемента служит как бы эталоном, который позволяет учесть величину и знак отклонения регулируемого параметра от заданных значений. Обычно задающий элемент имеет устройство для изменения задания, позволяющее изменять величину сигнала задающего элемента X3.э в ту или иную сторону.
Элемент сравнения сравнивает поданные на него встречные сигналы чувствительного элемента Хч. 3 и задающего элемента Хзэ и вырабатывает общий сигнал Увых, который передается на регулирующий орган. При равенстве подаваемых на элемент сравнения сигналов общий сигнал рассогласования равен нулю, т. е. на регулирующий орган команды не подается, и последний не перемещается.
Регулирующий орган получает от элемента сравнения сигнал рассогласования и в зависимости от его значения и знака изменяет количество энергии или вещества, подводимого к объекту регулирования (количество подводимого топлива к ДВС).
Как видно из рассмотренной схемы системы прямого автоматического регулирования, для перемещения регулирующего органа (рейки топливных насосов) энергия отбирается от самого объекта регулирования в виде энергии входного сигнала Хвх, которую чувствительный элемент преобразует в какое-то усилие ЛГЧ. э Таким образом, мощность сигнала Увых зависит от мощности сигнала чувствительного элемента (Увых<Хч.э)- Поэтому для получения Увых значительной величины необходимы большие габариты чувствительного элемента и регулятора прямого действия в целом. В связи с этим регуляторы прямого действия применяют для регулирования частоты вращения ДВС небольшой или средней мощности.
Рассмотрим принцип действия автоматической системы прямого регулирования применительно к ДВС, снабженному регулятором частоты вращения прямого действия. При изменении нагрузки на двигатель изменяется и параметр, характеризующий эту нагрузку, т. е. частота вращения. В результате изменяется величина выходного сигнала чувствительного элемента Х ч.э элемент сравнения вырабатывает сигнал рассогласования Увых, который воздействует на регулирующий орган, и количество подаваемого в цилиндры двигателя топлива начинает изменяться. При увеличении нагрузки на двигатель его частота вращения уменьшается, и рейка топливных насосов перемещается в сторону увеличения подачи топлива; при уменьшении нагрузки на двигатель регулятор перемещает рейку топливных насосов в сторону уменьшения подачи. При изменении подачи топлива частота вращения коленчатого вала двигателя начнет изменяться в сторону приближения к заданному значению. Автоматическая система вновь придет в равновесие, когда частота вращения станет равна заданному значению, сигнал рассогласования на элементе сравнения будет равен нулю и регулирующий орган зафиксируется в каком-то положении.
Статические характеристики системы автоматического регулирования
В этот момент нагрузка на двигатель будет соответствовать количеству подаваемого топлива, а частота вращения станет постоянной.
Автоматическую систему можно вывести из равновесного состояния и путем изменения задания задающему элементу регулятора, т. е. путем изменения сигнала задающего элемента X з. э. В этом случае создается сигнал рассогласования на элементе сравнения, и последний подает сигнал Увых на рейку топливных насосов, вызывая ее перестановку и изменение подачи топлива. В результате частота вращения коленчатого вала двигателя изменяется и начинает приближаться к такому значению, при котором сигнал чувствительного элемента вновь уравняется с новым, заданным значением сигнала задающего элемента. Автоматическая система вновь придет в равновесное состояние, когда новый параметр объекта — частота вращения коленчатого вала двигателя — будет соответствовать новому значению сигнала задающего элемента.
Как всякая материальная система, система прямого автоматического регулирования может находиться в двух состояниях: статическом, т. е. равновесном, когда все ее звенья находятся в относительном покое и величина регулируемого параметра не изменяется, и динамическом, когда все звенья системы находятся в движении и величина регулируемого параметра изменяется. Примером статического состояния является такое состояние системы, при котором количество подаваемого в цилиндры двигателя топлива соответствует внешней нагрузке; рейка топливных насосов в это время не перемещается, и частота вращения не изменяется. При переходе системы в динамическое состояние внешняя нагрузка на двигатель не соответствует количеству подаваемого в цилиндры топлива, при этом частота вращения коленчатого вала двигателя изменяется, и рейка топливных насосов перемещается, изменяя подачу топлива.
Рассматривая равновесное состояние автоматической системы, можно определить величину входного сигнала, соответствующую каждому значению выходного сигнала, т. е. частоту вращения, соответствующую каждому положению рейки топливных насосов. Очевидно, что при каждой установившейся нагрузке будет поддерживаться определенная частота вращения. Построенный по этим значениям график называется статической характеристикой системы автоматического регулирования.
Виды переходных процессов при автоматическом регулировании частоты вращения дизелей
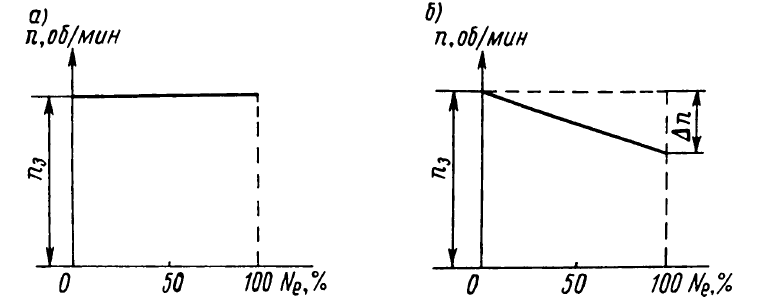
Эта характеристика может быть двух видов — астатическая ( а) и статическая (, б). В первом случае любому значению нагрузки на двигатель (мощности Ne) в установившемся режиме соответствует одно и то же значение частоты вращения; во втором случае разным значениям нагрузки на двигатель в установившемся режиме соответствуют разные значения частоты вращения.
Разность значений частоты вращения при установившемся режиме, замеренная при нулевой (холостой ход) и полной (100%-ной) нагрузках, называется статической ошибкой или зоной неравномерности автоматической системы. Для качественной оценки этой величины вводят понятие степень неравномерности, которая определяется отношением величины зоны неравномерности к величине заданного параметра n3 Степень неравномерности
к величине заданного параметра n3 Степень неравномерности  δ обычно определяется в процентах
δ обычно определяется в процентах

В астатических системах эта величина равна нулю, а в статических имеет значение, отличное от нуля. При регулировании частоты вращения дизелей она может достигать 15-20%.
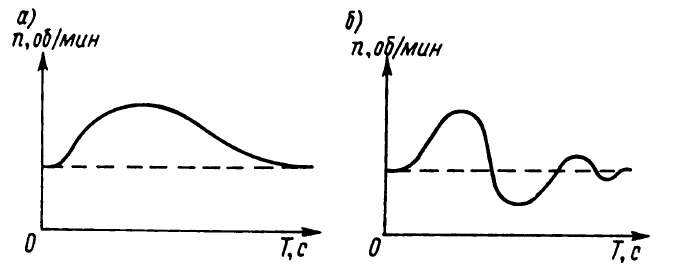
Динамическое состояние системы аналитически выражается дифференциальным уравнением, а графически — в виде графика, где по оси абсцисс откладывается время Т, с, а по оси ординат - значения параметра. При регулировании частоты вращения ДВС могут встретиться апериодический затухающий переходный процесс (а) и колебательный затухающий переходный процесс (б).
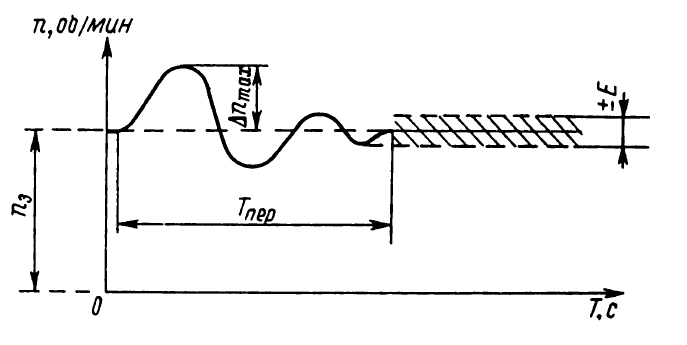
Качественные показатели переходного процесса
По графику переходного процесса можно судить о качестве и показателях переходного процесса автоматической системы регулирования, руководствуясь следующими положениями:
Таким образом, рассмотренный регулятор является статическим, поддерживая заданную частоту вращения со статической неравномерностью.
Степень неравномерности АСР с этим регулятором можно устанавливать в пределах 2-6% изменением приведенной жесткости пружин при изменении действия дополнительной пружины 5. С уменьшением действия пружины 5 (смещение опоры 4 ближе к оси рычага 6) неравномерность уменьшается.
Снижение статической неравномерности АСР приводит к уменьшению ее динамической устойчивости.
Для повышения динамической устойчивости АСР прикрывают иглу 9 катаракта (увеличивают время Тк катаракта). Полное закрытие иглы катаракта или заклинивание его поршня в цилиндре приводит к значительному росту статической неравномерности АСР вследствие непрерывной работы пружины 7 при различных нагрузках. Раскачивание АСР в динамике может возникнуть вследствие заедания тяги ТНВД. Признаком заедания является движение тяги рывками, а также непрерывное появление и исчезновение зазора a t между опорной гайкой тяги 10 и рычагом 6,
Для настройки регулятора на заданную частоту вращения изменяют предварительное натяжение пружины 3 вращением маховика 1, по резьбовому штоку которого перемещается опорная гайка 2.
Для остановки двигателя разворачивают рычаг 11, который, выбрав зазор α2 через упор воздействует непосредственно на тягу ТНВД. Наличие опорной пружины 12 позволяет отводить тягу в нулевое положение, не оказывая влияние на элементы регулятора.
-
Расчеты
На κ (орган управления двигателем) можно воздействовать с помощью автоматического регулятора, измеряющего различные параметры, характеризующие неустановившиеся режимы его работы.
Прежде всего, можно измерить изменение самого регулируемого параметра, т. е. φ, и в зависимости от его значения воздействовать на κ. Такой принцип регулирования получил наименование принципа Ползунова—Уатта. Уравнения этих регуляторов, связывающих φ и κ, в самом простейшем случае можно представить в виде
δz η=φ
где δz - коэффициент пропорциональности; η = ∆z/z0- безразмерное перемещение муфты 3 регулятора
Принцип Ползунова—Уатта. Уравнение такого регулятора в упрощенном представлении можно записать в виде:
δz η=φ; Координаты η и κ в данной системе являются внутренними и могут быть исключены. Это приводит к дифференциальному уравнению:
Общий интеграл этого уравнения при единичном ступенчатом возмущении, когда θ∂ = 1,0 и α∂ = -1,0 (при сбросе нагрузки), имеет вид:
Сопоставление полученного общего интеграла САР с общим интегралом
двигателя показывает, что (1 + κдδz)/Tдδz > κд/Тд.
Следовательно, принцип Ползунова- Уатта обеспечивает повышение устойчивости и качества работы системы. При установке на двигателе автоматического регулятора, действующего на основе принципа Ползунова- Уатта, переходный процесс может быть сходящимся, т.е.:
при t→ + ∞ величина
φ → δz/(1 + κдδz)
а система автоматического регулирования - устойчивой (даже при κд <0), когда сам двигатель неустойчив, если при этом 1 + κдδz> 0.
-
Схема автоматизации
Структурная схема системы прямого автоматического регулирования система прямого автоматического регулирования состоит из объекта регулирования и регулятора прямого действия. Регулятор частоты вращения включает три основных элемента: чувствительный элемент, элемент сравнения и задающий элемент.
Как видно из рисунка, регулятор получает входной сигнал Хвх (частота вращения коленчатого вала двигателя) и в зависимости от него вырабатывает выходной сигнал Увых (перемещение регулирующего органа -рейки топливных насосов).
Чувствительный элемент регулятора непрерывно замеряет параметр объекта регулирования - частоту вращения коленчатого вала и преобразует величину замеряемого параметра в выходной сигнал чувствительного элемента X ч. э. В регуляторах частоты вращения прямого действия выходной сигнал является механическим, он получается в виде перемещения. Зависимость между входным и выходным сигналами чувствительного элемента, как правило, пропорциональна.
Задающий элемент регулятора подает постоянный сигнал Хз.э на элемент сравнения. Величина этого сигнала соответствует величине выходного сигнала чувствительного элемента Хч. э, при которой регулируемый параметр (частота вращения) является заданным. Этот сигнал задающего элемента служит как бы эталоном, который позволяет учесть величину и знак отклонения регулируемого параметра от заданных значений. Обычно задающий элемент имеет устройство для изменения задания, позволяющее изменять величину сигнала задающего элемента X3.э в ту или иную сторону.
Элемент сравнения сравнивает поданные на него встречные сигналы чувствительного элемента Хч. 3 и задающего элемента Хзэ и вырабатывает общий сигнал Увых, который передается на регулирующий орган. При равенстве подаваемых на элемент сравнения сигналов общий сигнал рассогласования равен нулю, т. е. на регулирующий орган команды не подается, и последний не перемещается.
Регулирующий орган получает от элемента сравнения сигнал рассогласования и в зависимости от его значения и знака изменяет количество энергии или вещества, подводимого к объекту регулирования (количество подводимого топлива к ДВС).
Как видно из рассмотренной схемы системы прямого автоматического регулирования, для перемещения регулирующего органа (рейки топливных насосов) энергия отбирается от самого объекта регулирования в виде энергии входного сигнала Хвх, которую чувствительный элемент преобразует в какое-то усилие ЛГЧ. э Таким образом, мощность сигнала Увых зависит от мощности сигнала чувствительного элемента (Увых<Хч.э)- Поэтому для получения Увых значительной величины необходимы большие габариты чувствительного элемента и регулятора прямого действия в целом. В связи с этим регуляторы прямого действия применяют для регулирования частоты вращения ДВС небольшой или средней мощности.
Рассмотрим принцип действия автоматической системы прямого регулирования применительно к ДВС, снабженному регулятором частоты вращения прямого действия. При изменении нагрузки на двигатель изменяется и параметр, характеризующий эту нагрузку, т. е. частота вращения. В результате изменяется величина выходного сигнала чувствительного элемента Х ч.э элемент сравнения вырабатывает сигнал рассогласования Увых, который воздействует на регулирующий орган, и количество подаваемого в цилиндры двигателя топлива начинает изменяться. При увеличении нагрузки на двигатель его частота вращения уменьшается, и рейка топливных насосов перемещается в сторону увеличения подачи топлива; при уменьшении нагрузки на двигатель регулятор перемещает рейку топливных насосов в сторону уменьшения подачи. При изменении подачи топлива частота вращения коленчатого вала двигателя начнет изменяться в сторону приближения к заданному значению. Автоматическая система вновь придет в равновесие, когда частота вращения станет равна заданному значению, сигнал рассогласования на элементе сравнения будет равен нулю и регулирующий орган зафиксируется в каком-то положении.
Статические характеристики системы автоматического регулирования
В этот момент нагрузка на двигатель будет соответствовать количеству подаваемого топлива, а частота вращения станет постоянной.
Автоматическую систему можно вывести из равновесного состояния и путем изменения задания задающему элементу регулятора, т. е. путем изменения сигнала задающего элемента X з. э. В этом случае создается сигнал рассогласования на элементе сравнения, и последний подает сигнал Увых на рейку топливных насосов, вызывая ее перестановку и изменение подачи топлива. В результате частота вращения коленчатого вала двигателя изменяется и начинает приближаться к такому значению, при котором сигнал чувствительного элемента вновь уравняется с новым, заданным значением сигнала задающего элемента. Автоматическая система вновь придет в равновесное состояние, когда новый параметр объекта — частота вращения коленчатого вала двигателя — будет соответствовать новому значению сигнала задающего элемента.
Как всякая материальная система, система прямого автоматического регулирования может находиться в двух состояниях: статическом, т. е. равновесном, когда все ее звенья находятся в относительном покое и величина регулируемого параметра не изменяется, и динамическом, когда все звенья системы находятся в движении и величина регулируемого параметра изменяется. Примером статического состояния является такое состояние системы, при котором количество подаваемого в цилиндры двигателя топлива соответствует внешней нагрузке; рейка топливных насосов в это время не перемещается, и частота вращения не изменяется. При переходе системы в динамическое состояние внешняя нагрузка на двигатель не соответствует количеству подаваемого в цилиндры топлива, при этом частота вращения коленчатого вала двигателя изменяется, и рейка топливных насосов перемещается, изменяя подачу топлива.
Рассматривая равновесное состояние автоматической системы, можно определить величину входного сигнала, соответствующую каждому значению выходного сигнала, т. е. частоту вращения, соответствующую каждому положению рейки топливных насосов. Очевидно, что при каждой установившейся нагрузке будет поддерживаться определенная частота вращения. Построенный по этим значениям график называется статической характеристикой системы автоматического регулирования.
Виды переходных процессов при автоматическом регулировании частоты вращения дизелей
Эта характеристика может быть двух видов — астатическая ( а) и статическая (, б). В первом случае любому значению нагрузки на двигатель (мощности Ne) в установившемся режиме соответствует одно и то же значение частоты вращения; во втором случае разным значениям нагрузки на двигатель в установившемся режиме соответствуют разные значения частоты вращения.
Разность значений частоты вращения при установившемся режиме, замеренная при нулевой (холостой ход) и полной (100%-ной) нагрузках, называется статической ошибкой или зоной неравномерности автоматической системы. Для качественной оценки этой величины вводят понятие степень неравномерности, которая определяется отношением величины зоны неравномерности
к величине заданного параметра n3 Степень неравномерности δ обычно определяется в процентах В астатических системах эта величина равна нулю, а в статических имеет значение, отличное от нуля. При регулировании частоты вращения дизелей она может достигать 15-20%.
Динамическое состояние системы аналитически выражается дифференциальным уравнением, а графически — в виде графика, где по оси абсцисс откладывается время Т, с, а по оси ординат - значения параметра. При регулировании частоты вращения ДВС могут встретиться апериодический затухающий переходный процесс (а) и колебательный затухающий переходный процесс (б).
Качественные показатели переходного процесса
По графику переходного процесса можно судить о качестве и показателях переходного процесса автоматической системы регулирования, руководствуясь следующими положениями:
-
при установившемся (равновесном) режиме отклонение частоты вращения от заданного значения не должно превышать определенного предела ±Е, который называется зоной нечувствительности. Зона нечувствительности, отнесенная к величине заданного параметра (частота вращения) и выраженная в процентах, называется степенью нечувствительности ϵ: