Файл: Филиал государственного образовательного учреждения высшего образования.docx
Добавлен: 04.12.2023
Просмотров: 20
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
/МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
____________________
______________________________________
Филиал ГОСУДАРСТВЕННОГО ОБРАЗОВАТЕЛЬНОГО УЧРЕЖДЕНИЯ
ВЫСШЕГО ОБРАЗОВАНИЯ
«МОСКОВСКИЙ ЭНЕРГЕТИЧЕСКИЙ ИНСТИТУТ
(ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ)»
в г. Смоленске
Кафедра: Электромеханические системы
К У Р С О В А Я Р А Б О Т А
ПОЯСНИТЕЛЬНАЯЗАПИСКА
ТЕМА: ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПЕРЕДВЕЖЕНИЯ ТЕЛЕЖКИ МОСТОВОГО КРАНА
________________________
(условное обозначение)
Группа ЭП-19
СтудентСавельев А.Е.
(подпись) (Фамилия И. О.)
Руководитель проекта_________________________________________Барышников В.А.
(уч. звание, должность) (подпись) (Фамилия И. О.)
“________” _____________________ 2022 год
Смоленск 2022 г
АННОТАЦИЯ
Савельев А.Е. Электропривод механизма передвижения тележки мостового крана./ Курсовая работа – 2022г. – стр.38, рис.15.
Произведены расчеты и построены нагрузочные диаграммы производственного механизма и выбранного двигателя; рассчитаны и выбраны силовые элементы. Исследованы статические и динамические свойства системы и рассчитаны энергетические показатели за цикл работы привода. Приведены модели контуров регулирования привода (контур тока и контур скорости).
СОДЕРЖАНИЕ
АННОТАЦИЯ 2
ВВЕДЕНИЕ 4
1. Расчет и построение нагрузочной диаграммы производственного механизма, предварительный выбор электродвигателя 6
2. Расчет и построение нагрузочной диаграммы двигателя, проверка двигателя по условиям нагрева и допустимой перегрузки 8
3. Выбор схемы и расчет параметров силового преобразователя 11
4. Расчет и построение статических характеристик электропривода в разомкнутой системе 17
5. Расчет и построение статических характеристик электропривода при автоматическом регулировании координат с учетом предъявляемых требований
20
6. Расчет переходных процессов и построение уточненной нагрузочной диаграммы электропривода за цикл работы путем математического моделирования. Анализ результатов 26
7. Окончательная проверка двигателя по уточненной нагрузочной диаграмме и определение интегральных энергетических показателей электропривода за цикл работы 28
ЗАКЛЮЧЕНИЕ 31
Список используемой литературы: 32
ВВЕДЕНИЕ
Электрическим приводом (в дальнейшем – ЭП) называется электромеханическое устройство, предназначенное для приведения в движение рабочих органов машин и управления их технологическими процессами, состоящее из передаточного устройства, электродвигательного устройства, преобразовательного устройства и управляющего устройства.
Передаточное устройство содержит механические передачи и соединительные муфты, необходимые для передачи вырабатываемой двигателем механической энергии исполнительному механизму.
Преобразовательное устройство предназначается для управления потоком электрической энергии, поступающим из сети с целью регулирования режимов работы двигателя и механизма. Оно представляет собой энергетическую исполнительную часть системы управления электроприводом.
Управляющее устройство представляет собой информационную слаботочную часть системы управления, предназначенную для фиксации и обработки поступающей информации о задающих воздействиях и состоянии системы и выработки на ее основе сигналов управления преобразовательным, электродвигательным и другими устройствами.
Автоматизированный электропривод в настоящее время получил широчайшее применение во всех сферах жизни и деятельности. Такое распространение электропривод получил благодаря таким его особенностям, как экономичность, низкая стоимость, широкий диапазон мощностей, компактность, сравнительная простота реализации, относительная простота управления и контроля над технологическим процессом и др., совершенствование технических показателей. Соответственно, совершенствование технических показателей электроприводов во всех областях применения является основой технического прогресса.
В настоящее время существует множество различных систем управления приводами. Это система электропривода с асинхронными фазными двигателями и торможением противовключением, электроприводы с импульсно-ключевыми коммутаторами в цепи ротора асинхронных фазных электродвигателей, крановые электроприводы с тиристорными преобразователями напряжения в цепи статора асинхронного двигателя, системы управления двигателями постоянного тока, реализованные на основе управляемых выпрямителей, либо импульсных модуляторов и т. д.
Управление электроприводами реализуется, как правило, на основе преобразовательного устройства.
Целью данного курсового проекта является разработка электропривода повторно-кратковременного режима по системе «тиристорный преобразователь – двигатель постоянного тока». В выпускной работе охватываются такие вопросы, как выбор схемы электропривода, разработка системы управления электроприводом, анализ динамических свойств замкнутой и разомкнутой системы, расчет энергетических показателей электропривода.
-
Расчет и построение нагрузочной диаграммы производственного механизма, предварительный выбор электродвигателя
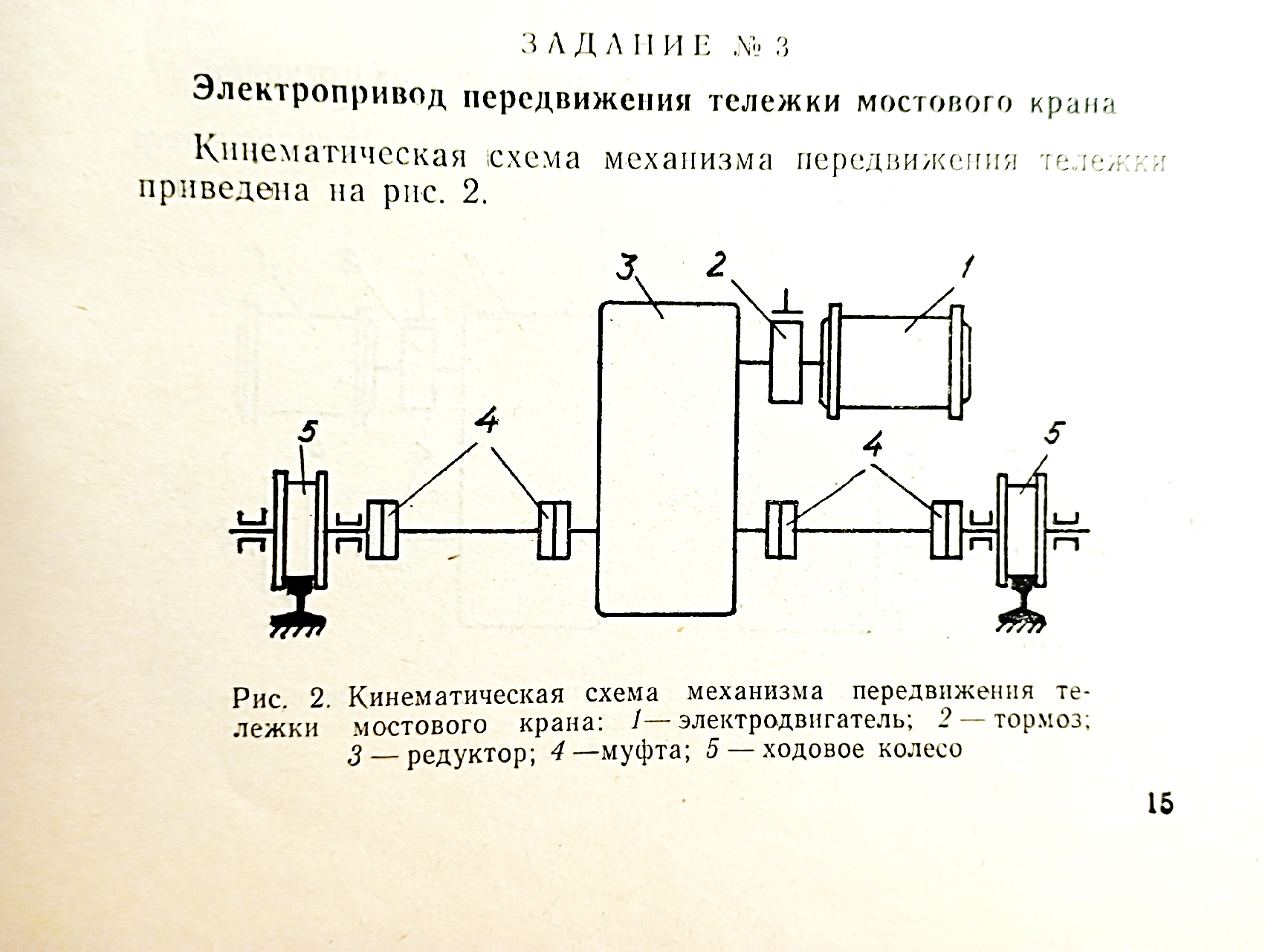
Рис.1 – Кинематическая схема
Технические данные:
Грузоподъемность крана mгр – 15 т;
Масса тележки mмех - 4,8 т;
Масса грузозахватывающего приспособления mг – 0,2 т
Длинна пролета моста lмоста –25 м;
Скорость передвижения тележки ????т - 0.653 м/с;
Пониженная скорость Vпон – 0.163 м/с
Ускорение ???? – 0,2 м/с2;
Диаметр ходового колеса – 0.3 м;
Диаметр цапфы ходового колеса – 0,07 м;
Передаточное число редуктора ????ред – 31,2;
КПД: а) при полной загрузке ????1=0,92;
б) с пустым крюком ????2 =0,68.
Режим работы ПВ – 40 %.
Необходимое усилие для перемещения тележки с грузом:


Статистический момент с грузом:

Усилие для передвижения тележки без груза:


Статистический момент без груза:

Время работы с грузом и без груза одинаково:
Учитывая продолжительность ПВ, найдем время цикла:

Принимаем двигатель положительного номинального режима S1.
Тогда эквивалентный момент за цикл равен:

Расчетная скорость двигателя:


Расчетная мощность двигателя:

где kз – коэффициент запаса, приблизительно учитывающий динамические моменты (1.2)
По расчетным данным выбираем двигатель 4ПБМ160LО4 с паспортными данными:
Номинальная мощность: Pн = 3.75 кВт;
Номинальное напряжение: Uн = 220 В;
Номинальная линейная скорость вращения: nном = 1000 об/мин;
Максимальная линейная скорость вращения: nмакс = 3000 об/мин;
Сопротивление обмотки якоря при 15 0С: Rя = 0,67Ом;
Сопротивление обмотки добавочных полюсов при 15 0С: Rдп = 0,445Ом;
Сопротивление обмотки возбуждения при 15 0С: Rв = 76 Ом;
Индуктивность цепи якоря: Lя = 14 мГн;
Момент инерции: Jдв = 0,042 кг
 ;
;Номинальная скорость и номинальный момент выбранного двигателя:

Максимальный момент двигателя:

Нагрузочная диаграмма производственного механизма представлена на рисунке 1.
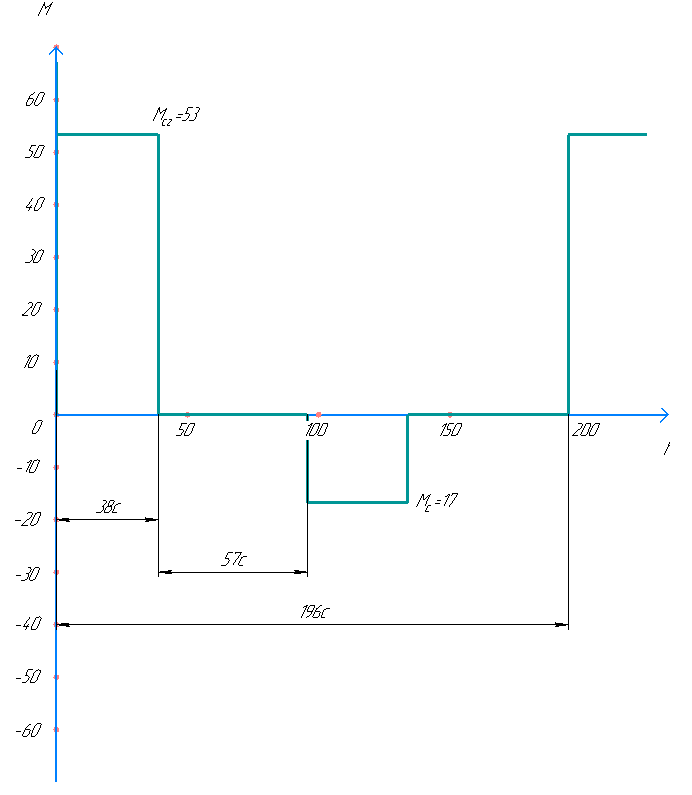
Рисунок 1 – Нагрузочная диаграмма производственного механизма
-
Расчет и построение нагрузочной диаграммы двигателя, проверка двигателя по условиям нагрева и допустимой перегрузки
Суммарный приведенный момент инерции при движении с грузом:

Момент инерции неучтенных вращающихся частей принят равным 20% от Jдв.
Суммарный приведенный момент инерции при движении без груза:

Динамический момент при движении с грузом равен:

Динамический момент при движении без груза равен:

Время и путь разгона привода с грузом:
-от нуля до пониженной скорости

-от пониженной скорости до номинальной:


Принимаем время работы на пониженной скорости t3=2c и тогда пройденный путь:

При торможении привода времена и пути такие же как при разгоне.
Весь путь пройденный за половину времени цикла:
Lмоста=2∙(s1+s2+s3)+s4

Время рабоыт на номинальной скорости:
Новое время работы:

Новое время цикла:

Время паузы:

По нагрузочной диаграмме двигателя найдем эквивалентный момент:


Эквивалентный момент двигателя и проверка:

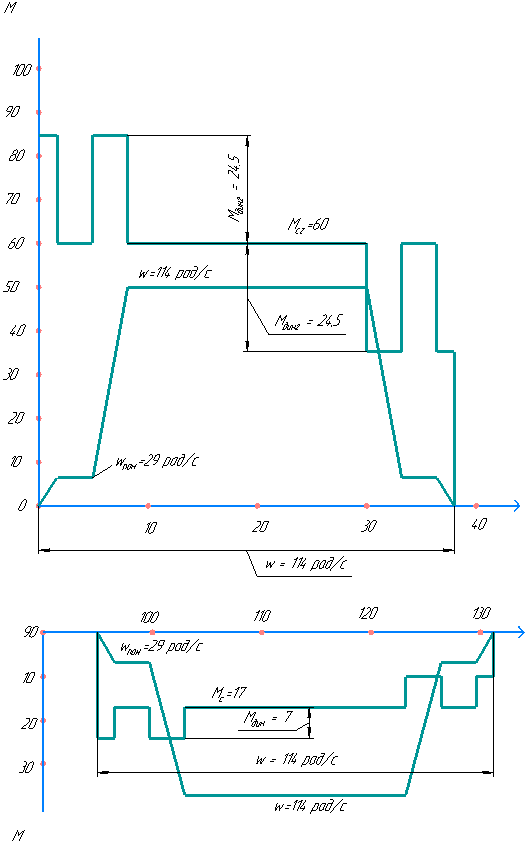
Рисунок 3 – Нагрузочная диаграмма двигателя
Максимальный момент по нагрузочной диаграмме и проверка:


Таким образом, выбранный двигатель подходит по условиям перегрузки.
-
Выбор схемы и расчет параметров силового преобразователя
По заданию на курсовую работу нужно разработать электропривод постоянного тока по системе ТП-Д. Схема тиристорного преобразователя для двигателя постоянного тока представлена на рисунке 3. В схему входит силовой трансформатор, реверсивный тиристорный преобразователь из 12 тиристоров, уравнительные дроссели, сглаживающий дроссель (не обязателен), двигатель постоянного тока.