Файл: Филиал государственного образовательного учреждения высшего образования.docx
Добавлен: 04.12.2023
Просмотров: 21
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
kу=Тя/Ти или kу=Rост/Rот
Коэффициент обратной связи по току:
 ,
,где kш – коэффициент передачи шунта;
kу – коэффициент усиления датчика тока.
Стопорный момент:


Стопорный ток:
 А;
А;Шунт выбираем с условием IшнIяmax(20А). Выбираем шунт типа 75ШИП1-25-0,5. Его параметры: Iшн=25 А Uшн=75 мВ
Коэффициент передачи датчика тока:
Коэффициент усиления преобразователя:
Так как Rот=Rзт, тогда

Постоянная интегрирования ПИ-регулятора:

 МОм
МОмКоэффициент усиления регулятора:

Постоянная времени ПИ-регулятора:
Тит=RзтСост
Компенсируемая постоянная времени регулятора:

Отсюда,
 кОм,
кОм,где Тя=Тэ – электромагнитная постоянная времени.
Сопротивление обратной связи:
 Мом
Мом5.2. Расчет контура скорости

Рисунок 12 – Структурная схема контура скорости.
Объект регулирования скорости состоит из замкнутого контура регулирования тока и механического звена электропривода и имеет вид
 .
.Некомпенсированная постоянная времени для контура скорости в ат раз больше, чем для контура тока:
 с.
с.Желаемая передаточная функция разомкнутого контура:
,
где ас=Тос/Тс – соотношение постоянных времени. ас=2 в настроенном на технический оптимум контуре.
Передаточная функция регулятора скорости (Wраз.с/Wорс):
 .
.Очевидно, что необходимо применить пропорциональный регулятор скорости (П-регулятор)
Коэффициент задания момента:
Его коэффициент усиления kус=Wр.с.
В замкнутой системе с и Мс связаны соотношением:
Коэффициент обратной связи по скорости:
 В
В с
сКоэффициент усиления П-регулятора
 .
.Максимальная скорость холостого хода:

Зададимся Rосс=100 кОм, тогда:
 Ом
ОмДопустим, используется тахогенератор с kтг=0,32 Вс. Тогда при 0=0з.max максимальная ЭДС тахогенератора:
 В.
В.Сопротивление в цепи обратной связи по скорости:
 кОм.
кОм.3) Расчет и построение статистических в замкнутой системе:

При М = Мстоп =89,2
 скорость равна:
скорость равна: 1/с.
1/с.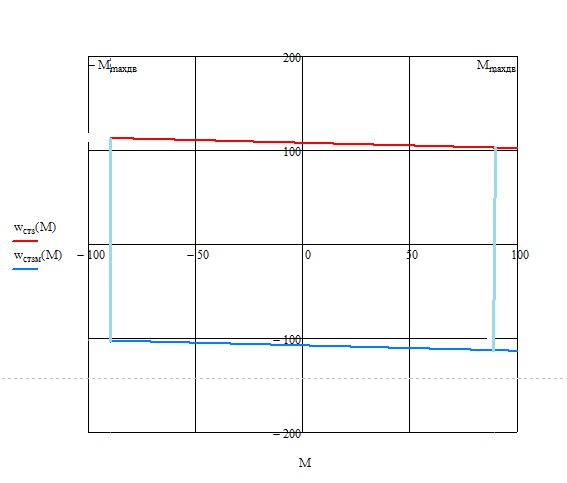
Рисунок 12 – Статические механические характеристики замкнутой системы
-
Расчет переходных процессов и построение уточненной нагрузочной диаграммы электропривода за цикл работы путем математического моделирования. Анализ результатов.
Для построения переходных процессов электропривода в замкнутой системе с подчиненным регулированием координат, используем программу MATLAB/Simulink.
Для начала введем схему контура тока, представленную на рис.9.

Рис.9 – Структурная схема контура тока
Зависимость ????я = ????(????) показана на рис.10
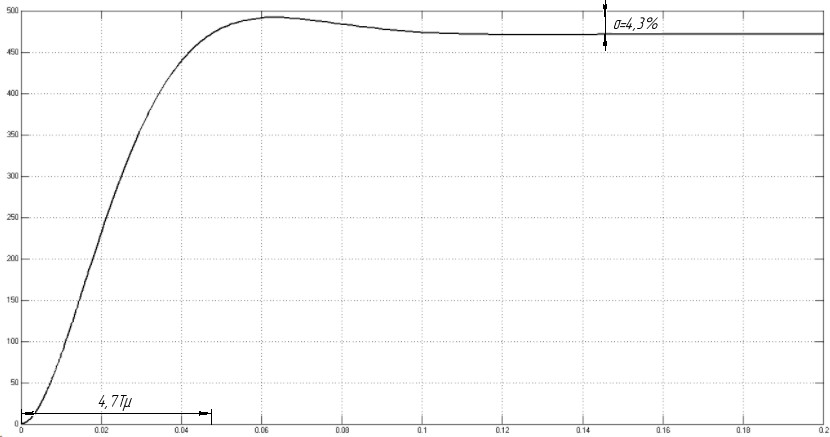
Рис.10 – Зависимость ????я = ????(????)
Исходя из графика видно, что контур тока настроен правильно.
Введем структурную схему системы ТП-Д, представленную на рис.11.

Рис.11 – Структурная схема системы ТП-Д
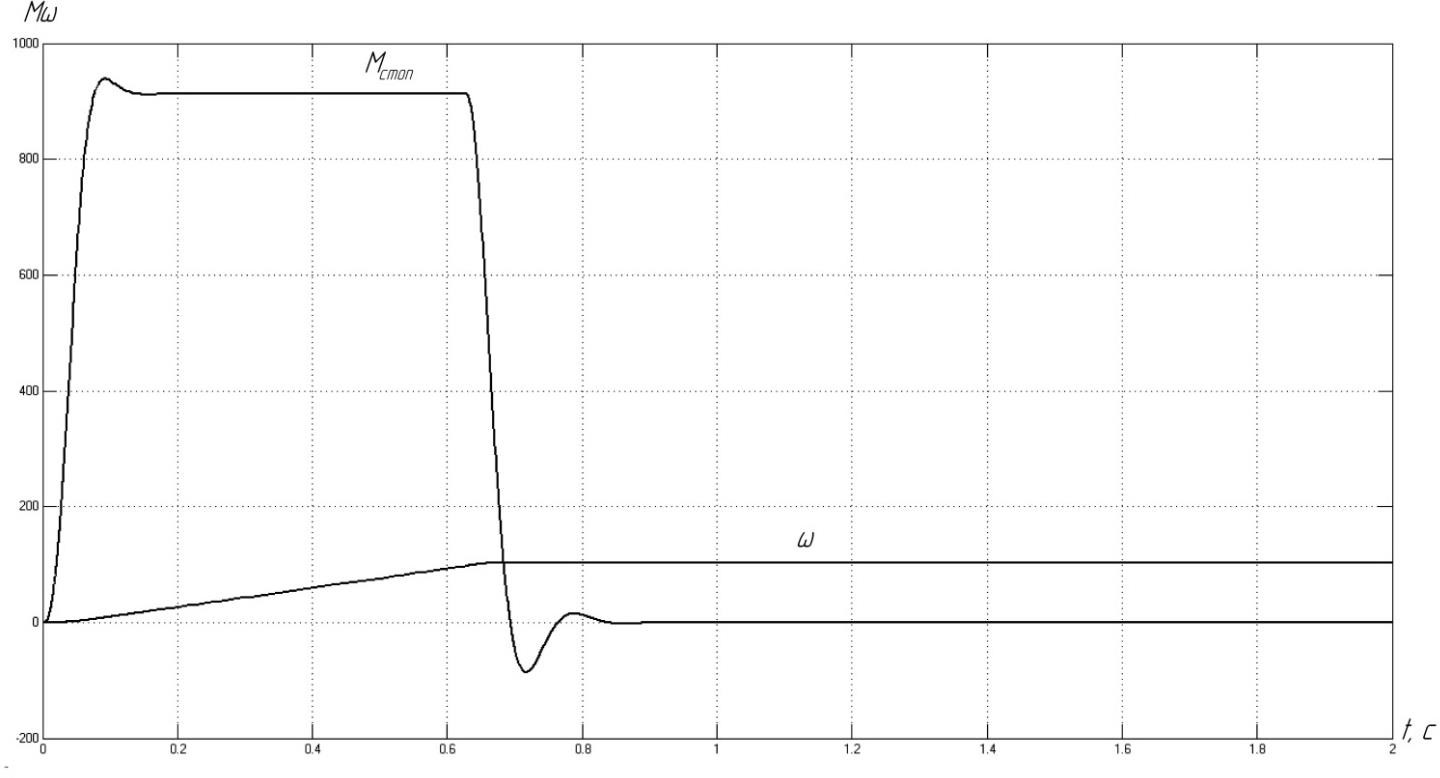
а)
б)
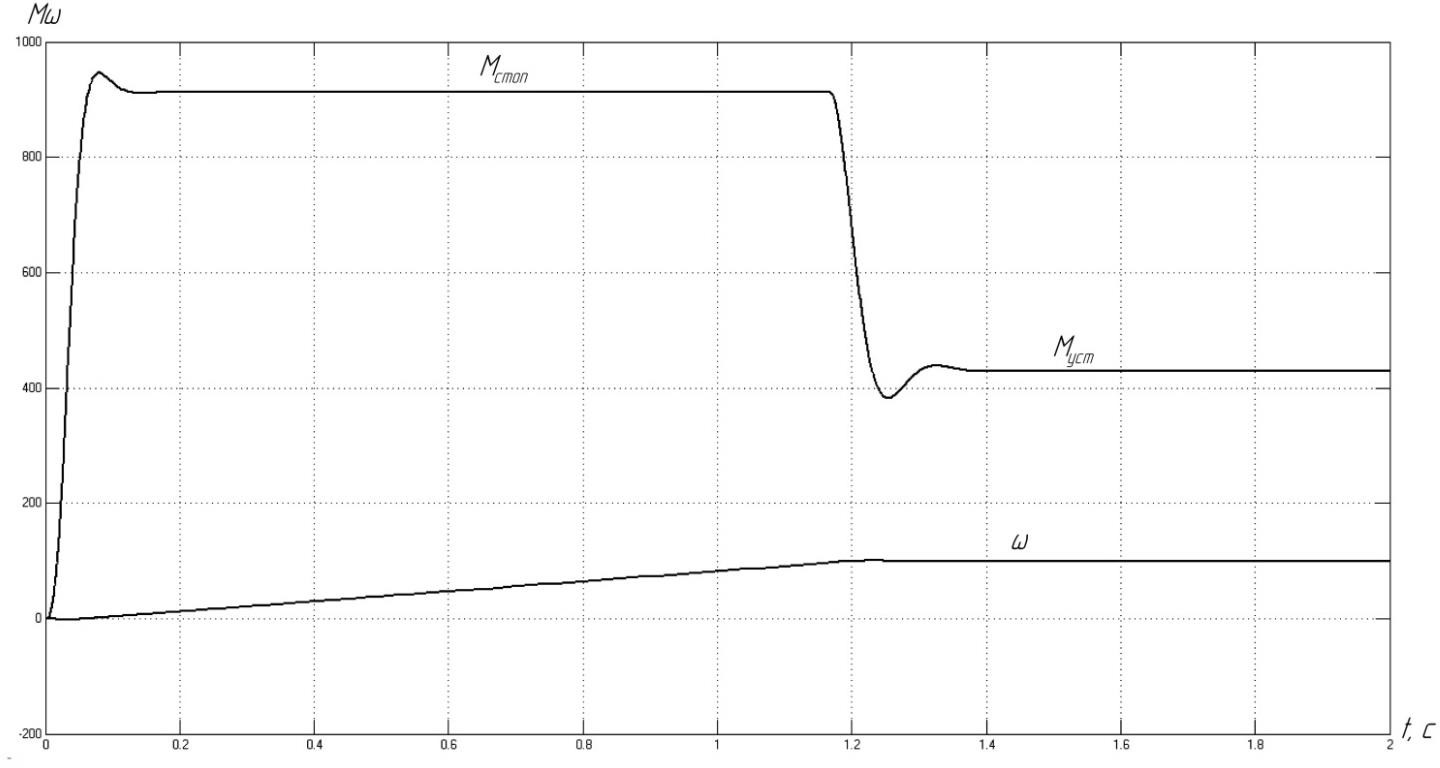
Рис.12 – Переходные процессы при пуске двигателя вхолостую (а) на номинальной нагрузке (б)
Для построения уточненной нагрузочной диаграммы введем схему, представленную на рис.13.
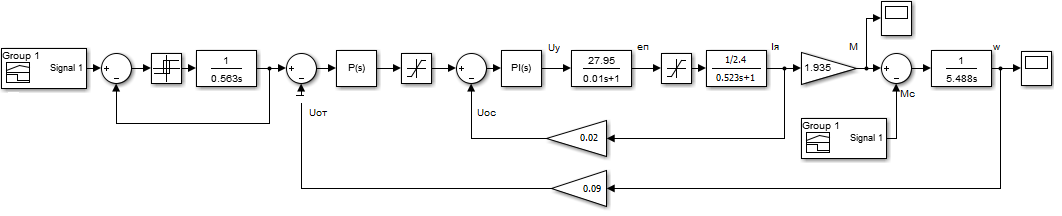
Рис.13 – Структурная схема системы ТП-Д
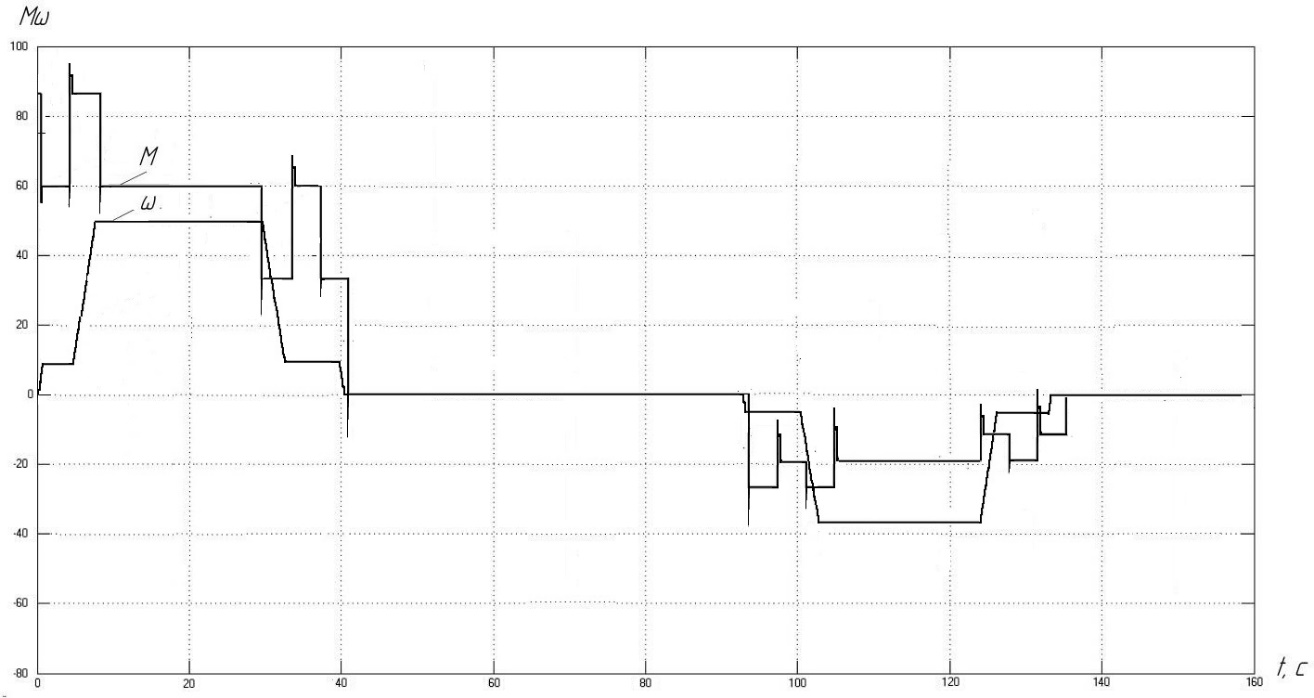
Рис.14 – Уточненная нагрузочная диаграмма за цикл работы
-
Окончательная проверка двигателя по уточненной нагрузочной диаграмме и определение интегральных энергетических показателей электропривода за цикл работы.
Уточненное значение
 может быть определено путем нахождения площади ограниченной графиком
может быть определено путем нахождения площади ограниченной графиком 
, построенного на основе уточненной нагрузочной диаграммы.

Для данного расчета используем программу MATLAB/Simulink. Для моделирования введем схему, представленную на рисунке 14.
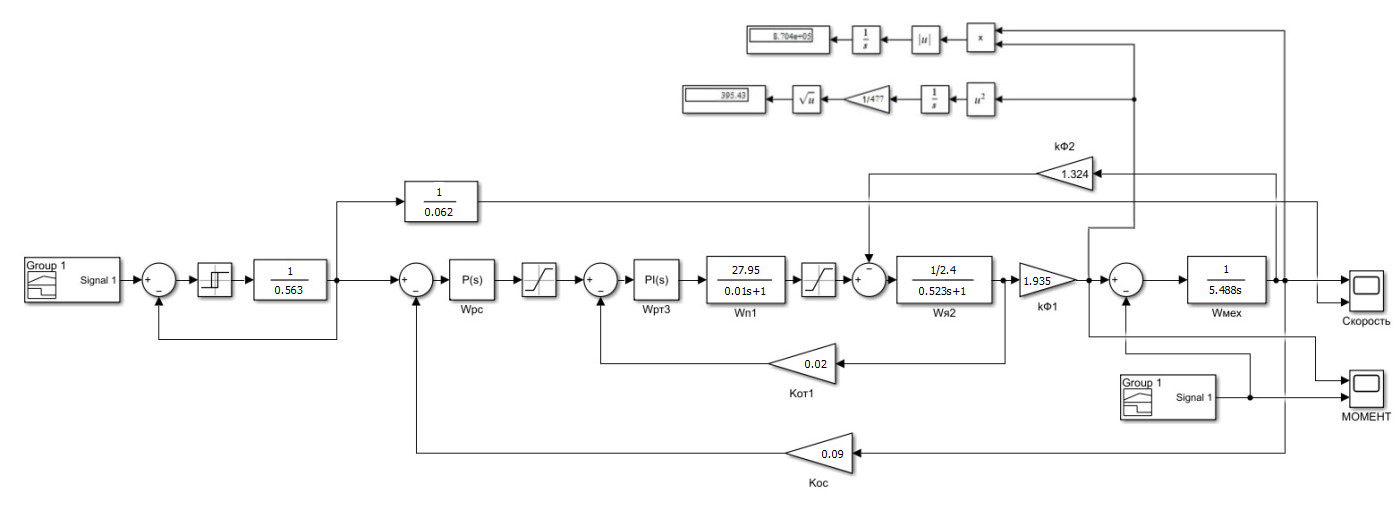
Рисунок 15 – Структурная схема для расчета
 и
и 
По данным блока Display,

Проверим двигатель по условиям нагрева и допустимой перегрузки:

Выбранный двигатель удовлетворяет данным условиям
Расчет интегральных энергетических показателей электропривода за цикл работы.
Полезная работа совершенная ЭП за производственный цикл, можно
определить путем нахождения площади, ограниченной графиком зависимости

Для данного расчета используем программу MATLAB/Simulink. Для моделирования введем схему, представленную на рис.17.
По данным блока Display,

Постоянные потери в двигателе:

где
 – номинальные потери,
– номинальные потери, – переменные номинальные потери.
– переменные номинальные потери.


Постоянные потери энергии за цикл:

Переменные потери энергии за цикл:

где
Потери энергии за цикл:

КПД за цикл:

ЗАКЛЮЧЕНИЕ
В данной работе был исследован и разработан электропривод механизма передвижения тележки. Целью работы являлось закрепление, углубление и обобщение знаний в области теории электропривода путем решения комплексной задачи проектирования конкретного производственного механизма.
На основе исходных данных и технических требований, в результате анализа, выбрана схема электропривода. Был сделан вывод, что наиболее рациональной системой в данном случае является система ТП-Д. Далее, по нагрузочным диаграммам был выбран двигатель постоянного тока серии 2ПН и произведена проверка по условиям нагрева и допустимой перегрузки. Оказалось, что выбранный двигатель удовлетворяет этим условиям.
Также рассчитан силовой преобразователь и выбраны элементы мостовой реверсивной схемы: трансформатор, тиристоры, дроссель.
Рассчитаны статические характеристики в замкнутой и разомкнутой системах. Построена уточненная нагрузочная диаграмма за производственный цикл. В конечном итоге не удалось повторить расчетную нагрузочную диаграмму.
Выбрана структура замкнутой системы – с подчиненным регулированием координат с применением настройки на технический оптимум.
Проведен анализ динамических свойств замкнутой системы. Рассчитаны переходные процессы на ЭВМ. Работа заканчивается расчетом энергетических показателей электропривода. Рассчитаны работа за цикл, потери и КПД. Значение КПД вполне приемлемо для данной системы – 78,8%.
Список литературы
-
Ключев В.И. Теория электропривода: Учебник для вузов.- 3-е изд. перераб. и доп. – М.: Энергоатомиздат, 2001 г. – 740 с.:ил. -
Чебовский О.Г. Моисеев Л.Г., Недошивин Р.П. Силовые полупроводниковые приборы: Справочник. - 2-е изд. - М.: Энергоатомиздат, 1985.-400с. -
Справочник по электрическим машинам: В 2 т. / Под общей ред. И.П. Копылова, Б.К. Клокова. М.: Энергоатомиздат, 1988, 1989. 1 т. 456 с.; 2 т. 688с. -
Данилов П.Е. Теория электропривода. [Текст]: монография / П.Е. Данилов, В.А. Барышников, В.В. Рожков. – Смоленск, 2014. – 348 с. -
Учебное пособие к курсовому проектированию по автоматизированному электроприводу. \ Под ред. Тикаиди В.И. – Смоленск, 1975. – 32с.