Файл: Филиал государственного образовательного учреждения высшего образования.docx
Добавлен: 04.12.2023
Просмотров: 22
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
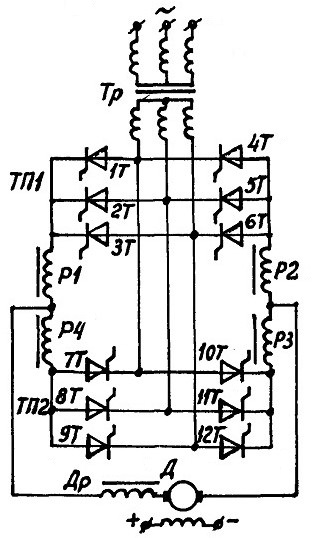
Рисунок 3 – Схема тиристорного преобразователя
Расчет силового трансформатора
Преобразователь подключается к сети, как правило, через трансформатор. Силовой трансформатор необходим для согласования напряжения питающей сети с напряжением двигателя и для обеспечения нулевого вывода в трехфазной нулевой схеме. Мощность трансформатора зависит от схем преобразователя и соединения его обмоток.
Исходными данными для расчета трансформатора являются напряжение, ток нагрузки и предварительно выбранная схема преобра-зователя.
Выбор силового трансформатора производится по расчетным значениям токов I1 и I2, напряжению U2 и типовой мощности Sтр.
Расчетное значение напряжения U2ф вторичной обмотки трансформатора, имеющего m-фазный ТП с нагрузкой на якорь двигателя в зоне непрерывных токов, с учетом необходимого запаса на падение напряжения в силовой части, определяется формулой:
 В,
В,где ku=0,461 – коэффициент, характеризующий отношение напряжений U2ф/Ud0 в реальном выпрямителе;
kc=1,1 – коэффициент запаса по напряжению, учитывающий возможное снижение напряжения сети;
k=1,05 – коэффициент запаса, учитывающий неполное открытие вентилей при максимальном управляющем сигнале;
kR=1,05 – коэффициент запаса по напряжению, учитывающий падение напряжения в обмотках трансформатора, в вентилях и за счет перекрытия анодов;
Ud=220 В – номинальное напряжение двигателя.
Расчетное значение тока вторичной обмотки:
 А,
А,где kI=0,815 – коэффициент схемы, характеризующий отношение токов I2ф/Id в идеальной схеме;
ki=1,05 – коэффициент, учитывающий отклонение формы анодного тока вентилей от прямоугольной;
Id – значение номинального тока двигателя.
 А
АРасчетная типовая мощность силового трансформатора:
 кВА,
кВА,где ks=1,05 – коэффициент схемы, характеризующий отношение мощностей Sтр/UdId для идеального выпрямителя с нагрузкой на противо-ЭДС.
Выбираем силовой трансформатор, удовлетворяющий условиям:
Sн5.95 кВА; U2фн122,997 В; I2фн23,35 А.
Выбираем трансформатор ТС-6,3-220/127.
Его характеристики:
Sн=6,3 кВА; U1нл=2205% В; U2нл=127 В; Рк=250 Вт; Uк=3,8% Y/Y0-
Коэффициент трансформации:

Расчетное значение тока первичной обмотки:
 А.
А.Выбор тиристоров.
Среднее значение тока тиристора:
 А,
А,где kзi=2,5 – коэффициент запаса по току;
kох – коэффициент, учитывающий интенсивность охлаждения силового вентиля. При естественном охлаждении kох=0,35;
mтр=3 – число фаз трансформатора.
Максимальная величина обратного напряжения:
 В,
В,где kзн=1,8 – коэффициент запаса по напряжению, учитывающий возможные повышения напряжения питающей сети (включая режим холостого хода) и периодические выбросы Uобр, обусловленные процессом коммутации вентилей;
kUобр=1,065 – коэффициент обратного напряжения, равный соотношению напряжений UBmax/Ud0 для мостовой реверсивной схемы выпрямления;
Ud0 – напряжение преобразователя при =0:
 В
ВИз справочника [3] выбираем тиристор серии «Т132-50-6», средний ток тиристора: 50 А
Выбор индуктивности дросселей.
Под действием неуравновешенного напряжения, минуя цепь нагрузки, может протекать уравнительный ток, который создает потери в вентилях и обмотках трансформатора и может приводить к аварийному отключению установки.
Требуемая величина индуктивности уравнительных дросселей, исходя из ограничения амплитуды переменной составляющей уравнительного тока до величины, не превышающей 10%:
 ,
,где U1п – удвоенное эффективное значение первой гармоники выпрямленного напряжения;
 В,
В,где Uп/Ud0=0.26 – определено по рисунку из [2] для m=6 и =900;
m=6 – число фаз выпрямления;
 Гн.
Гн.При применении не насыщающихся дросселей:
Lуд=0.5Lуд.расч=0.044 Гн.
Выбираем дроссель серии СРОС-200/0.5У4 с Lуд=0.06 Гн.
Рассчитаем индуктивность сглаживающего дросселя:
 Гн,
Гн,где Uп=Udo*0,26=152.739 В – действующее значение первой гармоники выпрямленного напряжения.
Необходимая величина индуктивности сглаживающего дросселя:
Lсд=Lнеобх-(Lдв+2Lтр+Lуд),
где Lдв – индуктивность якоря и дополнительных полюсов двигателя:
 Гн;
Гн;Lтр – индуктивность фазы трансформатора, приведенная к контуру двигателя;
2
 мГн;
мГн;Lсд=0.044-(0.013+2*0.761+0.06)=-31 мГн.
Т.к. Lсд0, то сглаживающий дроссель не требуется.
3.4. Определение расчетных параметров силовой цепи ТП-Д.
Расчетное сопротивление цепи выпрямленного тока:
 ,
,где k=1+(tн-t)=1+0.004(90-15)=1.3;
=0,004 – температурный коэффициент сопротивления меди;
tн=900 – рабочая температура для класса изоляции В;
t=150 – температура окружающей среды;
Rщ – сопротивление щеточного контакта:
 мОм;
мОм;Rп – сопротивление преобразователя:
 ,
,где Rт – активное сопротивление обмоток трансформатора:
 Ом;
Ом;хт – индуктивное сопротивление обмоток трансформатора:
 Ом;
Ом;Rуд – активное сопротивление уравнительных дросселей:
 Ом.
Ом.Таким образом,
 Ом;
Ом; Ом.
Ом.-
Расчет и построение статических характеристик в разомкнутой системе.
Статические характеристики в разомкнутой системе могут быть построены по следующим выражениям:
где Rя.дв – сопротивление якорной цепи двигателя с учетом нагрева:
 Ом
ОмТок возбуждения двигателя:
 А
АНоминальный ток якоря:
 А
АСтатические скорость и момент:
wс=104 1/с; Мсг =53 Нм; Мс=17.4 Нм.
Из уравнений для статических характеристик:
 В/с
В/сЭДС преобразователя при с и Мсг:

ЭДС преобразователя при с и Мс:

Уравнение статической механической характеристики при Еп.необх1:
 ;
; .
.Уравнение статической механической характеристики при Еп.необх2:
 ;
; .
.Максимальная ЭДС преобразователя при =0:
 В.
В.Уравнение статической характеристики при Еп.max:
 ;
; .
.Статическая характеристика при Еп=0:
 ;
; .
.Естественная статическая характеристика:
 ;
; .
.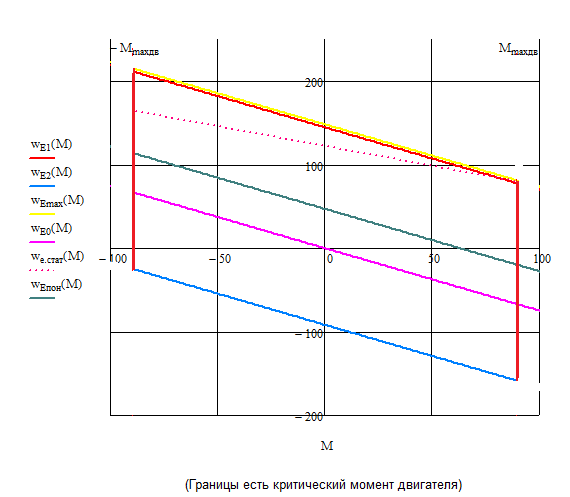
Рисунок 4 – Статические характеристики разомкнутой системы.
-
Выбор структуры замкнутой системы электропривода, расчет ее параметров
При выборе САР по системе ТП-Д особое внимание следует уделить требованиям, предъявляемым к системе. Система должна быть экономична, должна обеспечивать нужный диапазон регулирования координат, а так же быть простой и способной
решать высокий круг задач. Поэтому в данной работе мы выбираем систему ТП-Д с подчиненным регулированием координат с настройкой на технический оптимум.
При настройке подчиненного регулирования пренебрегаем влиянием обратной связи по ЭДС.
Влияние обратной связи по ЭДС:
Медленно меняющееся возмущение;
Незначительно влияет на динамику;
Вносит незначительную статическую ошибку.
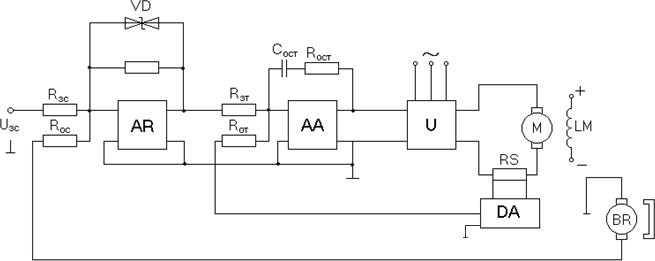
Рис.5 – Принципиальная схема подчиненного регулирования тока и скорости в системе ТП-Д
Рассчитаем постоянные времени электропривода:
Электромагнитная постоянная цепи якоря:
Электромеханическая постоянная электропривода:
Расчет контура тока
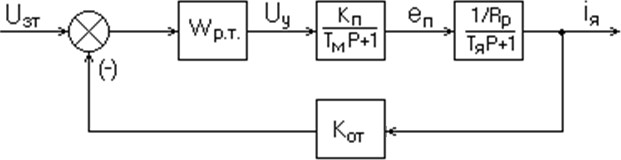
Рисунок 9 – Структурная схема регулирования тока.
Отнесем время запаздывания тиристорного преобразователя п и инерционность фильтров Тф к некомпенсированным постоянным времени, т.е. Т=п+ Тф=0,01 с. Тогда, если не учитывать внутреннюю обратную связь по ЭДС двигателя, можно записать передаточную функцию объекта регулирования тока:
 ,
,где kп – коэффициент усиления преобразователя.
Желаемая передаточная функция прямого канала разомкнутого контура при настройке на технический оптимум:
 ,
,где ат=Тот/Т - соотношение постоянных времени контура.
Отношение Wраз.т к Wорт есть передаточная функция регулятора тока:
 ,
,где Тит – постоянная интегрирования регулятора тока:
Из выражения для Wрт видно, что необходим ПИ-регулятор тока.
Коэффициент усиления пропорциональной части: