Файл: В графической части проекта выполнены функциональная и структурная схемы разработанного электропривода.docx
Добавлен: 04.12.2023
Просмотров: 73
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
АННОТАЦИЯ
Автоматизированный электропривод механизма перемещения стола продольно-строгального станка. – Челябинск: ЮУрГУ, ИОДО; 2023, 53 с., 26 ил., библиогр. список - 5 наим., 1 лист чертежа ф. А1.
В курсовом проекте разработан электропривод главного движения стола продольно-строгального станка. Проведен выбор типа электропривода, выбор и проверка электродвигателя, выбор основных узлов силовой части, составлена математическая модель силовой части, спроектирована система управления электроприводом, рассчитан контур регулирования тока якоря и цепи компенсации ЭДС якоря, рассчитан контур регулирования скорости и задатчик интенсивности.
В графической части проекта выполнены функциональная и структурная схемы разработанного электропривода.
Содержание
| Введение Исходные данные Задание к проекту 1 Выбор типа электропривода 1.1 Выбор и проверка электродвигателя | 5 6 7 8 8 |
| 1.1.1 Расчет нагрузочной диаграммы механизма 1.1.2 Предварительный выбор двигателя 1.1.3 Расчет нагрузочной диаграммы двигателя 1.2 Проверка двигателя по нагреву | 8 10 12 20 |
| 2 Выбор основных узлов силовой части 2.1 Выбор тиристорного преобразователя 2.2 Выбор силового трансформатора 2.3 Выбор сглаживающего реактора 2.4 Принципиальная электрическая схема силовой части | 21 21 21 23 24 |
| 3 Математическая модель силовой части электропривода 3.1 Расчет эквивалентных параметров системы 3.2 Выбор базисных величин системы относительных единиц 3.3 Расчет параметров силовой части электропривода в относительных единицах 3.4 Расчет коэффициентов передачи датчиков | 26 26 27 29 31 |
| 4 Выбор типа системы управления электроприводом 5 Расчет регулируемой части контура тока якоря 5.1 Расчет параметров математической модели контура тока 5.2 Реализация датчика ЭДС 5.3 Конструктивный расчет датчика ЭДС и звена компенсаци | 33 35 35 37 39 |
| 6 Конструктивный расчет регулятора тока 7 Расчет регулирующей части контура скорости 7.1 Расчет параметров математической модели контура скорости 7.2 Конструктивный расчет регулирующей части контура скорости | 42 45 45 46 |
| 8 Расчет задатчика интенсивности 8.1 Расчет параметров математической модели задатчика интенсивности 8.2 Конструктивный расчет задатчика интенсивности Заключение Библиографический список | 49 49 49 52 53 |
Введение
Процесс обработки детали на продольно-строгальном станке поясняет рисунок 1. Снятие стружки происходит в течение рабочего (прямого) хода, при обратном движении резец поднят, а стол перемещается на повышенной скорости. Подача резца производится периодически от индивидуального привода во время холостого хода стола в прямом направлении. Поскольку при строгании резец испытывает ударную нагрузку, то значения максимальных скоростей, строгания не превосходят 75-120 м/мин (в отличие от скоростей точения и шлифования 2000 м/мин и более). Под скоростью строгания (резания) понимают линейную скорость Uпр перемещения закрепленной на столе детали относительно неподвижного резца на интервале рабочего хода стола. При этом скорость входа резца в металл и скорость выхода резца из металла в сравнении со скоростью строгания ограничиваются до 40 % и менее в зависимости от обрабатываемого материала, чтобы избежать скалывания кромки. Указанные обстоятельства ограничивают производительность и для ее повышения остается только сократить непроизводительное время движения: обратный ход осуществляется на повышенной скорости Uоб > Uпр, а пускотормозные режимы при реверсе принимают допустимо минимальной продолжительности. Хороший эффект в этом дает двухдвигательный привод.
Рисунок 1 - Процесс обработки на продольно строгальном станке
Он должен быть управляемым по скорости, поскольку для различных материалов (в соответствии с технологией обработки и свойствами материалов) используются различные оптимальные или максимально допустимые скорости строгания; кроме того, движение характеризуется различными скоростями на разных интервалах времени рабочего цикла, высокой частотой реверсирования с большими пускотормозными моментами. Применяют двух- и однозонное управление скоростью.
Исходные данные
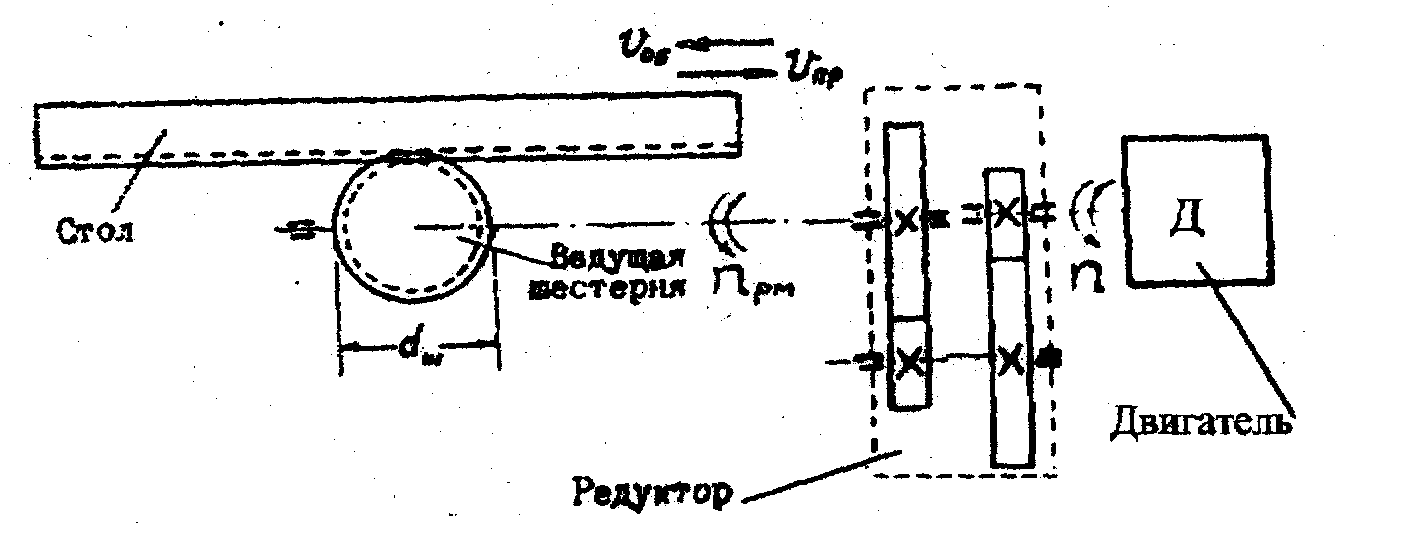
Рисунок 2 - Кинематическая схема механизма
Таблица 1 - Исходные данные
| Параметры | Условные обозначения | Значение |
| Усилие резания | Fz | 20000 Н |
| Скорость рабочего хода | Vпр | 0,3 м/с |
| Масса стола | mc | 2000 кг |
| Масса детали | mд | 3500 кг |
| Радиус ведущей шестерни | rш | 0,25 м |
| Длинна детали | Lд | 4,5 м |
| Отношение обратной скорости к рабочей скорости | Кобр | 2 |
| Отношение пониженной скорости к рабочей скорости | Кпон | 0,4 |
| Путь подхода детали к резцу | Lп | 0,2 м |
| Путь после выхода резца из детали | Lв | 0,15 м |
| Коэффициент трения стола о направляющие | μ | 0,08 |
| КПД механической передачи при рабочей нагрузке | ηпN | 0,95 |
| КПД механических передач при перемещении стола на холостом ходу | ηпхх | 0,5 |
Задание к проекту
Для механизма перемещения стола продольно-строгального станка выбрать тип электропривода, выполнить выбор электродвигателя и его проверку по нагреву и перегрузке, выбрать силовой преобразовательный агрегат, силовой трансформатор и реакторы, выполнить расчет элементов системы автоматического управления электроприводом, выполнить компьютерное моделирование системы автоматизированного электропривода в типовых режимах.
Требования к электроприводу:
-
Обеспечение работы механизма по следующему циклу:
-
подход детали к резцу с пониженной скоростью; -
врезание на пониженной скорости; -
разгон до рабочей скорости прямого хода; -
резание на скорости прямого хода; -
замедление до пониженной скорости перед выходом резца; -
выход резца из детали; -
замедление до остановки; -
разгон в обратном направлении до рабочей скорости обратного хода; -
возврат стола на холостом ходу со скоростью обратного хода; -
замедление до остановки (стол возвращается в исходное положение). Пониженную скорость принять Vпон = 0,4·Vпр.
-
Обеспечение рекуперации энергии в тормозных режимах. -
Разгоны и замедления должны проходить с постоянством ускорения. Обеспечение максимально возможных ускорений в переходных режимах. -
Статическая ошибка по скорости при резании не должна превышать 10%. -
Ограничение момента электропривода при механических перегрузках.
1 Выбор типа электропривода
Заданным требованиям соответствует регулируемый электропривод с двигателем постоянного тока независимого возбуждения и замкнутой по скорости системой автоматического регулирования. В качестве управляемого преобразователя выбираем реверсивный тиристорный преобразователь. Такой электропривод обеспечивает высокие показатели качества регулирования скорости, высокую точность и быстродействие надежность, простоту в наладке и эксплуатации. Регулирование скорости принимается однозонным (управление изменением напряжения якоря двигателя при постоянном потоке возбуждения). Система управления электроприводом реализуется на аналоговой элементной базе.
1.1 Выбор и проверка электродвигателя
1.1.1 Расчет нагрузочной диаграммы механизма
Для предварительного выбора двигателя построим нагрузочную диаграмму механизма (график статических нагрузок механизма) Расчет времени участков цикла на этапе предварительного выбора двигателя выполняем приблизительно, т.к. пока нельзя определить время разгонов и замедлений (суммарный момент инерции привода до выбора двигателя неизвестен).
Скорость обратного хода стола:
 ,
,где Vпр - скорость рабочего хода (Vпр = 0,3 м/с, см. таблицу 1).
 .
.Усилие перемещения стола на холостом ходу:
 ,
, где mс - масса стола (mс = 2000 кг, см. таблицу 1);
mд - масса детали (mд = 3500 кг, см. таблицу 1);
g - ускорение свободного падения (g = 9,81 м/с2);
μ - коэффициент трения стола о направляющие (μ = 0,08, см. таблицу 1).
 .
.Усилие перемещения стола при резании:
 ,
,где Fz - усилие резания (Fz = 20000 Н, см. таблицу 1).
 .
.Время резания (приблизительно):
 ,
,где Lд - длинна детали (Lд = 4,5 м, см. таблицу 1);
 .
.Время подхода детали к резцу (приблизительно):
 ,
,где Lп - длинна подхода детали к резцу (Lп = 0,2 м, см. таблицу 1);
 с.
с.Время прямого хода после выхода резца из детали (приблизительно):
 ,
,где Lв - путь после выхода резца из металла (Lв = 0,15 м, см. таблицу 1);
 .
.Время возврата стола (приблизительно):
 ,
,где Vобр - скорость обратного хода.
 .
.Время цикла (приблизительно):
 ,
, .
.1.1.2 Предварительный выбор двигателя
При расчете мощности двигателя полагаем, что номинальной скорости двигателя соответствует скорость обратного хода стола (наибольшая скорость механизма), т.к. принято однозонное регулирование скорости, осуществляемое вниз от номинальной скорости. Ориентируемся на выбор двигателя серии Д, рассчитанного на номинальный режим работы S1 и имеющего принудительную вентиляцию. Эквивалентное статическое усилие за цикл:
 ,
, .
.Расчетная мощность двигателя:
 ,
,где Кз - коэффициент запаса (примем Кз = 1,1);
ηпN - КПД механических передач при рабочей нагрузке.
 .
.Выбираем двигатель Д810 по [2]. Номинальные данные двигателя приводятся в таблице 2.
Таблица 2 - Данные выбранного двигателя
| Параметр | Обозначение | Значение |
| Мощность номинальная | PN | 55000 Вт |
| Номинальное напряжение якоря | UяN | 220 В |
| Номинальный ток якоря | IяN | 282 А |
| Номинальная частота вращения | ηN | 550 об/мин |
| Максимальный момент | Мmax | 2550 Н · м |
| Сопротивление обмотки якоря | Rя0 | 0,0234 Ом |
| Сопротивление обмотки добавочных полюсов | Rдп | 0,0122 Ом |
| Момент инерции якоря двигателя | Jд | 3,65 кг · м2 |
| Число пар полюсов | рп | 2 |
| Допустимая величина действующего значения переменной составляющей тока якоря отнесенная к номинальному току (коэффициент пульсаций) | kI(доп) | 0,15 |
Двигатель данной серии не компенсированный, имеет принудительную вентиляцию и изоляцию класса Н.