Файл: В графической части проекта выполнены функциональная и структурная схемы разработанного электропривода.docx
Добавлен: 04.12.2023
Просмотров: 76
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Коэффициент передачи датчика тока:
 ,
,где IЯ(max) - максимальный ток якоря по перегрузочной способности двигателя.
 .
.Максимальный ток определяется по формуле
 .
.Коэффициент передачи датчика напряжения:
 ,
, .
.4 Выбор типа системы управления электроприводом
В курсовом проекте проектируется аналоговая система управления электроприводом. Система управления строится по принципу подчиненного регулирования координат.
Каждый электропривод снабжается системой автоматического регулирования (САР), предназначенной для изменения по заданному закону основной координаты электропривода, регулирования и ограничения промежуточных координат. В системе регулирования скорости основной координатой является скорость двигателя, а промежуточной — ток якоря. В САР основной координатой является положение исполнительного органа механизма, а скорость и ток — промежуточными.
Система регулирования замкнутая (с обратной связью), т.е. заданное значение координаты сравнивается с фактическим и их разность, усиленная и преобразованная в регуляторе, в конечном счете воздействует на вход СИФУ тиристорного преобразователя якоря или возбуждения электродвигателя. Системы построены по принципу подчиненного регулирования, в соответствии с которым САР разбивается на несколько контуров, один из этих контуров является внешним, на его входе сравниваются задание и фактическое значение основной координаты. Выход внешнего контура является задающим сигналом для промежуточного контура, на входе которого сравниваются выходной сигнал внешнего контура и фактическое значение промежуточной координаты, и т.д., а выход внутреннего контура воздействует на вход СИФУ.
Выбор структуры системы управления электропривода производится с учетом требований технического задания на электропривод. Основными требованиями к электроприводу являются: поддержание заданной скорости вращения электропривода (с учетом требуемых диапазона регулирования скорости, допустимой статической погрешности поддержания скорости),
величина токоограничения при упоре, ускорение электропривода при пуске.
В качестве внутреннего контура принимаем контур регулирования тока якоря. Он применяется, если требуется обеспечить:
- ограничение тока якоря допустимым значением при перегрузках электропривода;
- пуск или торможение электропривода с максимально возможным темпом;
- дополнительную коррекцию во внешнем контуре регулирования скорости.
В качестве внешнего контура принимаем контур регулирования скорости.
Рассмотрим функциональную схему системы управления электроприводом (рисунок 9). Система управления электроприводом представляет собой двухконтурную систему автоматического регулирования (САР) скорости. Внутренним контуром системы является контур регулирования тока якоря, внешним и главным контуром - контур регулирования скорости.
Для проектируемого электропривода выбираем однократную систему регулирования скорости. Однократная САР скорости по сравнению с двукратной не обладает астатизмом по возмущающему воздействию (моменту сопротивления), однако для проектируемой системы обеспечение такого астатизма не требуется. Однократная САР скорости обладает лучшими динамическими свойствами по сравнению с двукратной САР. Для контуров регулирования тока якоря и скорости применяется настройка на модульный оптимум. Данную настройку обеспечивают пропорционально-интегральный регулятор тока (РТ) и пропорциональный регулятор скорости (PC). Плавное ускорение и замедление привода обеспечиваются с помощью задатчика интенсивности (ЗИ). Для разгона или торможения привода задатчик интенсивности формирует линейно изменяющийся во времени сигнал задания на скорость.
Сигналы обратных связей поступают в систему регулирования от датчиков тока якоря (ДТ), напряжения якоря (ДН) и скорости (ДС). Датчики состоят из измерительного элемента и устройства согласования. Измерительным элементом для датчика тока якоря является шунт в цепи якоря Rш, для датчика напряжения - делитель напряжения Rд, для датчика скорости - тахогенератор (ТГ). Устройство согласования обеспечивает необходимый коэффициент передачи датчика и гальваническую развязку силовых цепей от цепей управления. Косвенный датчик ЭДС (ДЭ) вычисляет ЭДС якоря по сигналам датчиков тока и напряжения. Сигнал ЭДС через звено компенсации (ЗК) подается на вход регулятора тока, что требуется для компенсации отрицательного влияния ЭДС якоря на процессы в контуре тока.
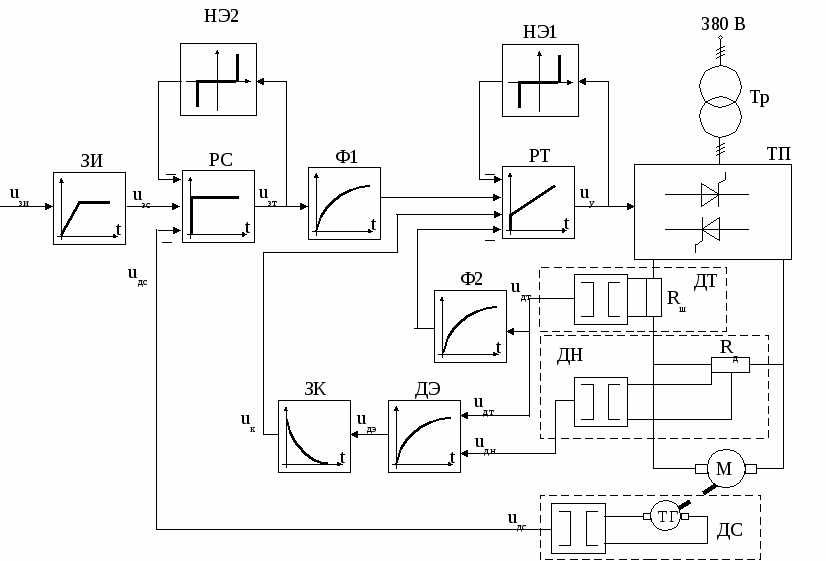
Рисунок 9 - Функциональная схема системы управления электроприводом
5 Расчет регулируемой части контура тока якоря
5.1 Расчет параметров математической модели контура тока
Рассмотрим структуру и выполним расчет параметров модели контура тока, используя систему относительных единиц. Структурная схема контура тока представлена на рисунке 10. В контуре тока находятся звенья регулятора тока (РТ), фильтра (Ф), тиристорного преобразователя (ТП) и главной цепи (ГЦ). На структурной схеме фильтр показан внутри контура, что эквивалентно наличию фильтра в цепи задания и обратной связи (см. рисунок 9). Обратная связь по току при рассмотрении относительных величин принимается единичной. На процессы в контуре тока влияет ЭДС якоря двигателя, которую можно считать возмущающим воздействием. При отсутствии ЭДС якоря (якорь неподвижен) в контуре тока можно рассматривать одно звено объекта управления с передаточной функцией:
 .
.В реальных САУ с подчиненным регулированием параметров величина Тμ лежит в пределах 0,004 – 0,01 с.
Для нашей системы выберем Тμ = 0,007 с.
Рисунок 10 - Структурная схема контура регулирования тока якоря
При синтезе регулятора тока влияние ЭДС якоря не учитывается. Передаточная функция регулятора тока находится по условию настройки контура на модульный оптимум:
 .
.Получаем передаточную функцию ПИ-регулятора. Параметры регулятора тока находятся по следующим формулам:
Тi1 = Tэ = 0,04 с;
 ;
; .
.При выборе данной передаточной функции регулятора тока замкнутый контур тока будет описываться передаточной функцией фильтра Баттерворта II порядка:
 ,
, .
.Влияние ЭДС якоря приводит к появлению статической ошибки по току, что ухудшает качество системы. Для компенсации данного влияния вводится положительная обратная связь по ЭДС якоря. Структурная схема контура тока с компенсацией ЭДС представлена на рисунке 11. При выносе фильтра из контура он должен оказаться в цепи задания на ток (Ф1), в цепи обратной связи по току (Ф2) и в цепи обратной связи по ЭДС, где его удобно объединить с датчиком ЭДС. Таким образом, датчик ЭДС имеет небольшую инерционность, что является необходимым, т.к. безынерционный датчик ЭДС реализовать невозможно.
Компенсирующий сигнал Uк подается на вход регулятора тока, а не непосредственно в точку действия ЭДС якоря (между звеньями ТП и ГЦ). Поэтому влияние звеньев регулятора тока и преобразователя на прохождение компенсирующего сигнала необходимо устранить. Это достигается за счет включения в цепь обратной связи по ЭДС звена компенсации. Передаточная функция звена компенсации определяется по формуле:
 ,
,где
 ;
; .
. .
.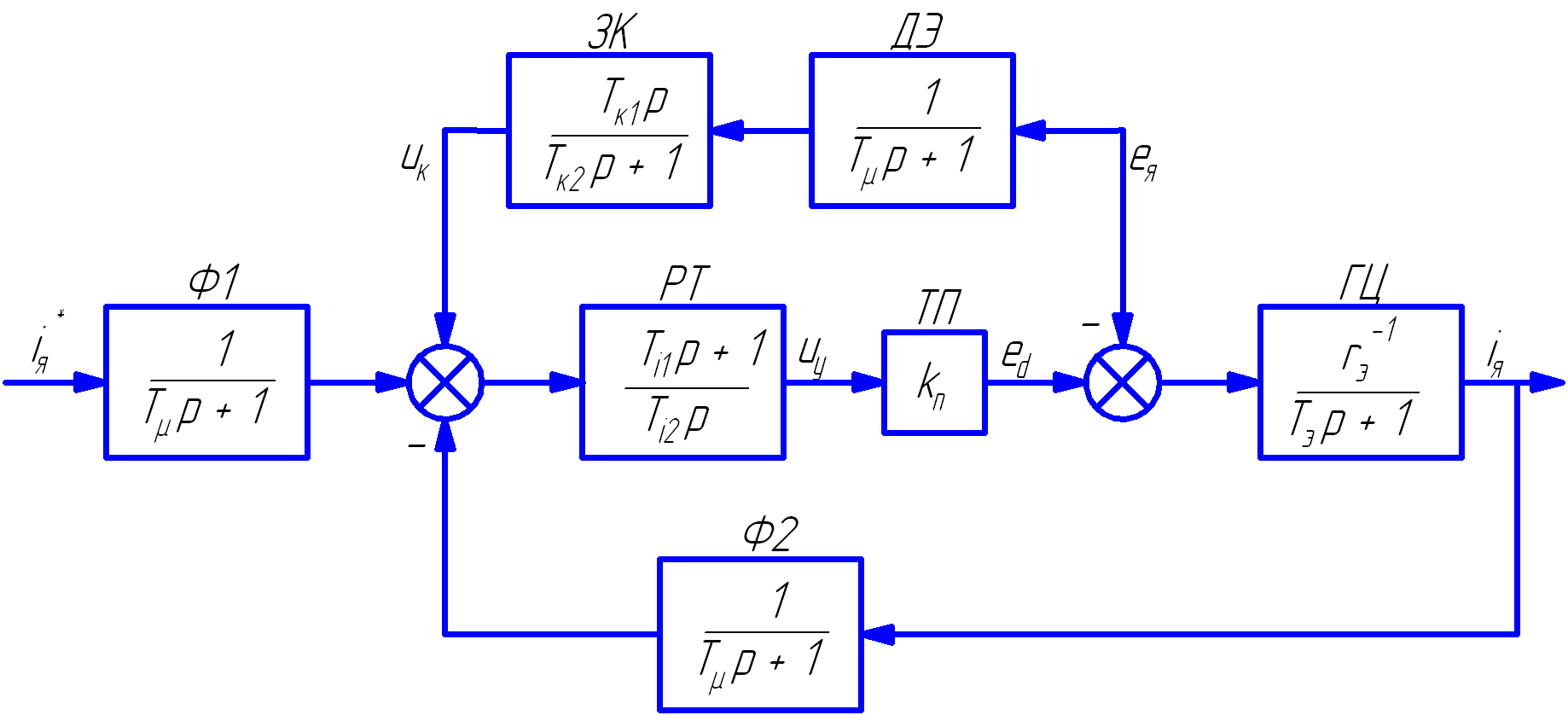
Рисунок 11 - Структурная схема контура тока с компенсацией ЭДС
В результате компенсации ЭДС статическая ошибка по току устраняется.
ЭДС якоря двигателя недоступна для прямого измерения. Косвенный датчик ЭДС якоря использует сигналы тока и напряжения якоря. Связь между током, напряжением и ЭДС якоря следует из уравнения электрического равновесия для якорной цепи. В области изображений по Лапласу это уравнение имеет вид:
 .
.Реализовать датчик ЭДС в полном соответствии с данным уравнением невозможно, т.к. требуется идеальное форсирующее звено. Поэтому внесем в датчик инерционное звено с постоянной времени Тµ. В результате уравнение датчика ЭДС принимает вид:
5.2 Реализация датчика ЭДС
ЭДС якоря двигателя, в отличие от тока якоря и скорости, недоступна для прямого измерения. Датчик косвенного измерения ЭДС якоря использует сигналы датчика тока якоря и датчика напряжения на якоре двигателя. Связь между током якоря, напряжением якоря и ЭДС якоря устанавливает уравнение электрического состояния равновесия в якорной цепи. В операторном виде оно имеет вид:
 ,
, где
 .
.В результате компенсации ЭДС статическая ошибка по току устраняется.
ЭДС якоря двигателя недоступна для прямого измерения. Косвенный датчик ЭДС якоря использует сигналы тока и напряжения якоря. Связь между током, напряжением и ЭДС якоря следует из уравнения электрического равновесия для якорной цепи. В области изображений по Лапласу это уравнение имеет вид:
 .
.Реализовать датчик ЭДС в полном соответствии с данным уравнением невозможно, т.к. требуется идеальное форсирующее звено. Поэтому внесем в датчик инерционное звено с постоянной времени Тµ. В результате уравнение датчика ЭДС принимает вид:
 .
.Данному уравнению соответствует структурная схема датчика ЭДС структурная схема датчика ЭДС, показанная на рисунке 12. Также показано звено компенсации.
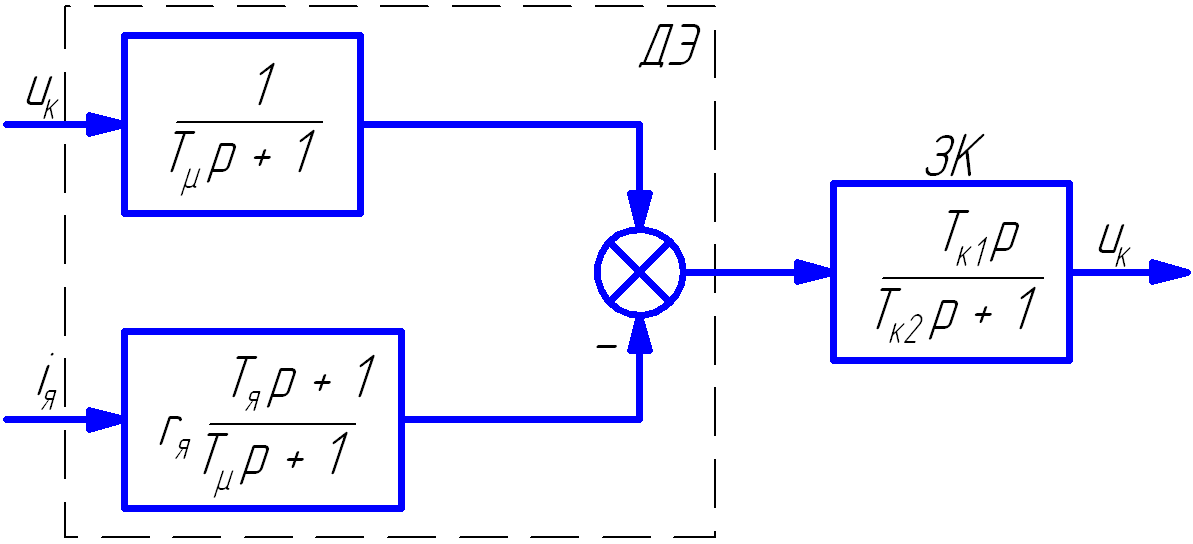
Рисунок 12 - Структурная схема датчика ЭДС и звена компенсации
5.3 Конструктивный расчет датчика ЭДС и звена компенсации
В аналоговых системах автоматического управления электроприводами реализация регуляторов и других преобразователей сигналов осуществляется на базе операционных усилителей.
Принципиальная схема датчика ЭДС и звена компенсации показана на рисунке 13. Фильтр в канале напряжения реализуется на элементах R12, R13, С6. Форсирующее звено в канале тока реализуется на элементах R10, R11, С5. Операционный усилитель DA3 предназначен для суммирования сигналов в датчике ЭДС, что осуществляется путем суммирования токов I1 и I2. Звено компенсации выполнено на операционном усилителе DA2. Элементы входной цепи и цепи обратной связи усилителя DA2 R8, R7, С4 обеспечивают реализацию свойств реального дифференцирующего звена.
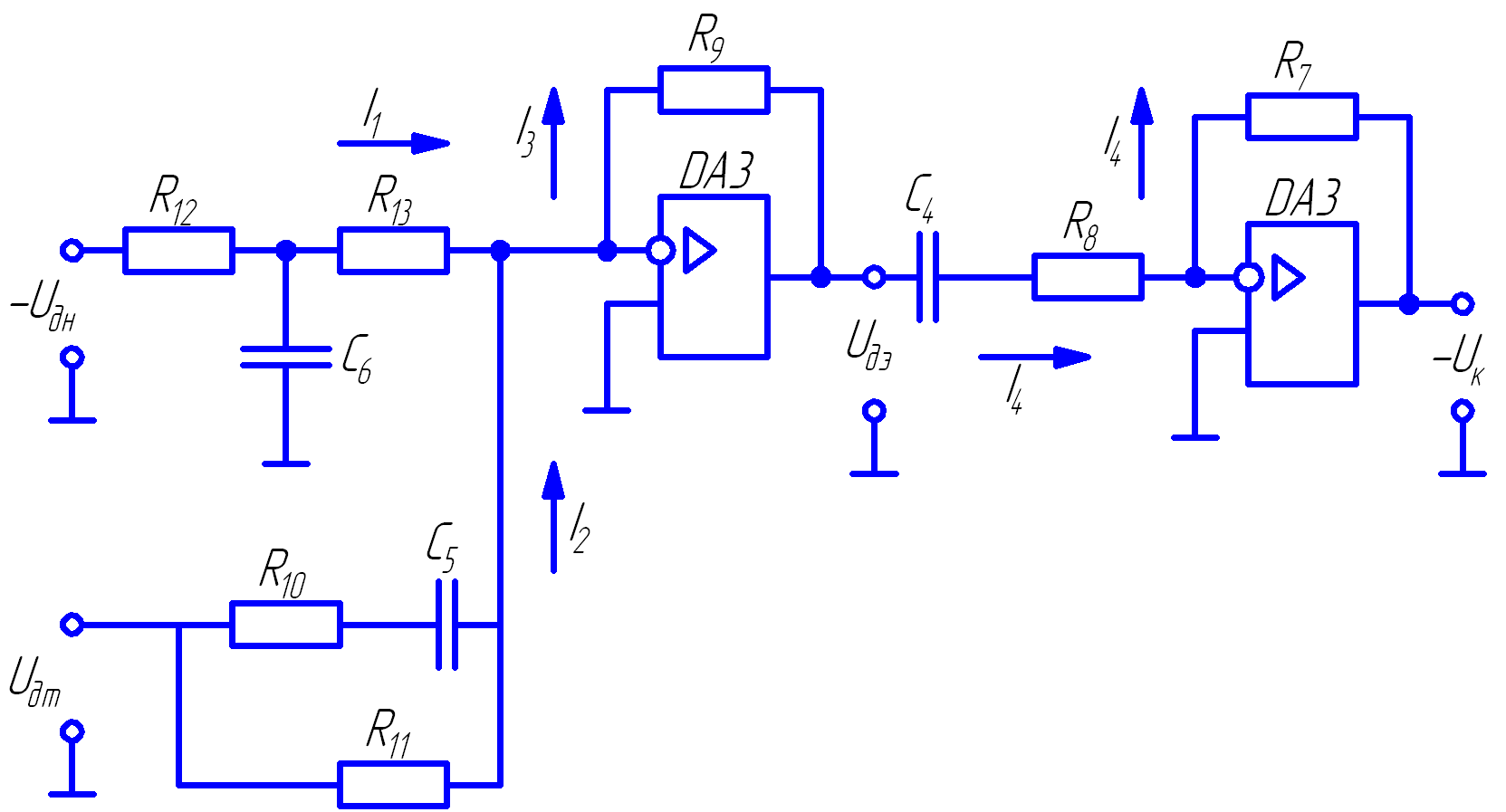
Рисунок 13 - Принципиальная схема датчика ЭДС и звена компенсации
На рисунке 14 представлена структурная схема для абсолютных величин токов и напряжений, которая соответствует принципиальной схеме, показанной на рисунке 13. При ее составлении было принято, что сопротивления R12 и R13 одинаковы.
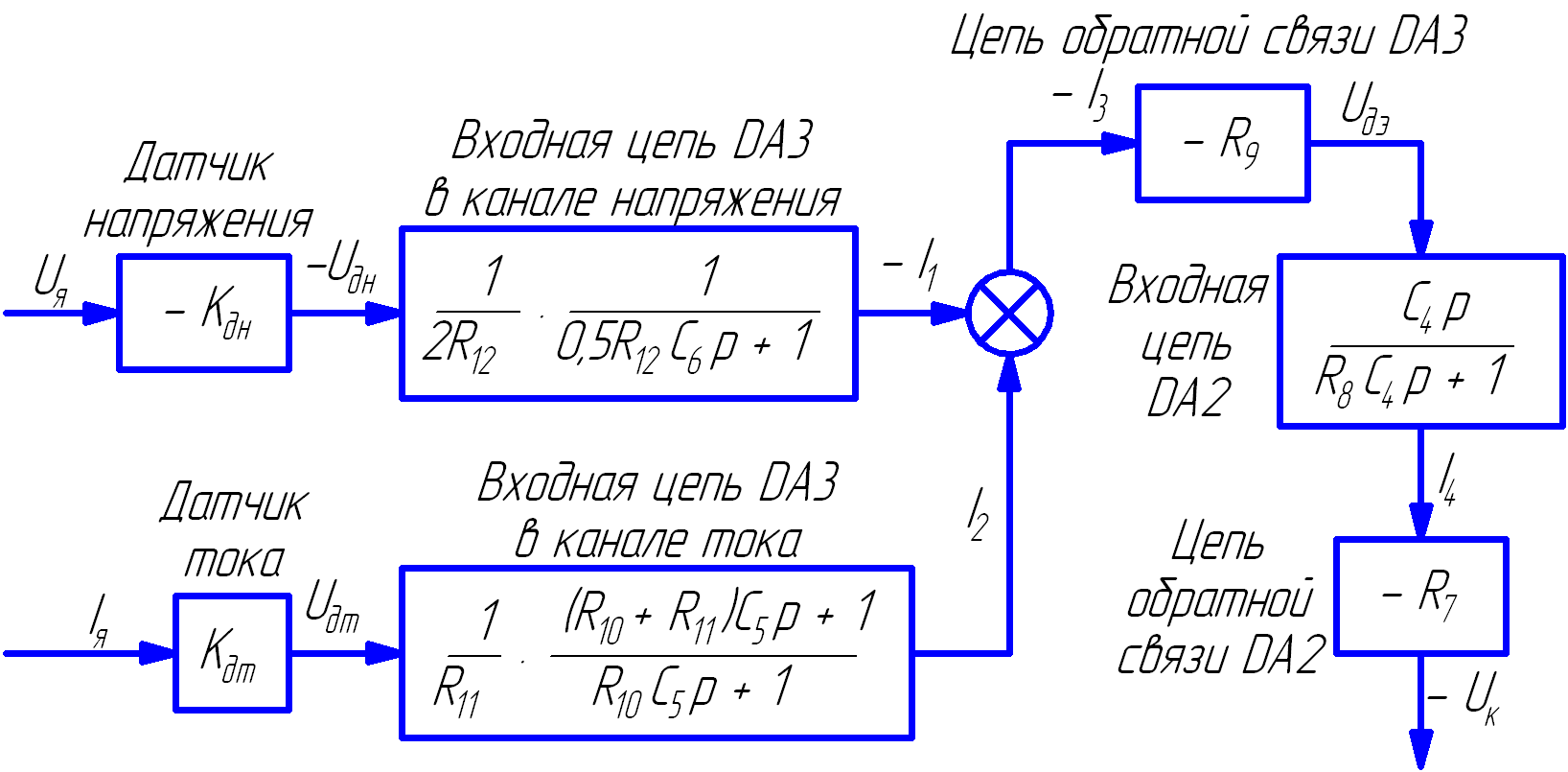
Рисунок 14 - Структурная схема датчика ЭДС и звена компенсации для абсолютных величин
От структурной схемы для абсолютных величин перейдем к структурной схеме для относительных величин (рисунок 15). На данной схеме показаны относительные коэффициенты датчиков напряжения и тока. При переходе от абсолютных величин к относительным величинам в передаточных функциях входных цепей операционных усилителей появляется сопротивление R