Файл: Курсовая работа по дисциплине Теория конечных автоматов.docx
Добавлен: 04.12.2023
Просмотров: 203
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
входные сигналы могут быть сняты, после чего может начаться следующий такт, т.е. возможно поступление новых входных сигналов.
Функция переходов - определяет состояние автомата a(t + 1) в момент дискретного времени t + 1 в зависимости от состояния автомата a(t) и значения входного сигнала x(t) в момент времени t| a(t + 1) = f[a(t), x(t)].
Функция выходов - определяет зависимость выходного сигнала автомата y(t) от состояния автомата a(t) и входного сигнала x(t) в момент времени t:
y(t) = φ 1 [a(t), x(t)] или y(t) = φ2 [a(t)].
Автомат Мили - синхронный автомат, у которого выходные сигналы зависят как от состояния автомата, так и от значения входного сигнала:
y(t) = φ 1 [a(t), x(t)]; a(t + 1) = f[a(t), x(t)].
Автомат Мура - синхронный автомат, выходные сигналы которого в момент времени t однозначно определяются состоянием автомата в этот же момент времени и в явном виде не зависят от значений входных сигналов:
y(t) = φ 2 [a(t)]; a(t + 1) = f[a(t), x(t)].
Совмещенный автомат (С-автомат) - отличается от автоматов Мили и Мура тем, что он одновременно реализует две функции выходов φ 1 и φ 2, каждая из которых характерна для этих автоматов в отдельности.
Триггер – элемент или элементарный автомат (например, Мура), имеющий два внутренних устойчивых состояния, соответствующих логическим 1 и 0, т.е. логический элемент запоминания.
Комбинационным автоматом (КА) называют логическую цепь, имеющую в общем случае несколько входов и выходов, в которой значения выходных переменных у в каждый момент времени однозначно определяются набором входных переменных х в тот же момент времени:
X = λ(Y), где λ некоторый оператор преобразования входных переменных X (элементы множества x1, x2, x3…xn) в выходные Y (элементы множества y1, y2, y3…yn).
Задача логического проектирования (синтеза) КА, реализующего требуемый оператор преобразования входных переменных в выходные, состоит в определении оптимальной структуры автомата для заданного перечня логических элементов (заданной элементной базы). Оптимальной принято считать структуры автомата, содержащие их минимальное число.
Условия функционирования системы:
Датчики контроля транспортной системы:
Электроприводы исполнительных устройств транспортной системы:
На рисунке 1 изображена технологическая схема КА, она описывает первичную схему без индексов.
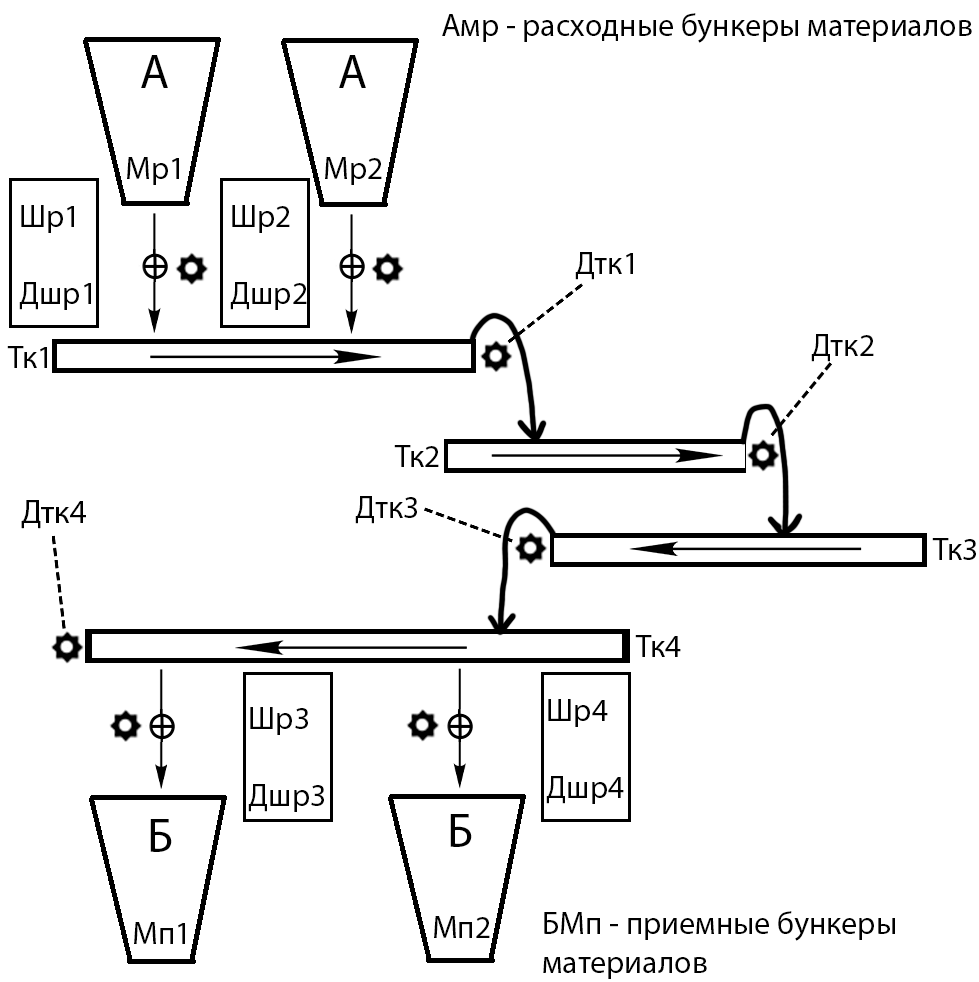
Рисунок 1 – технологическая схема без индексов
На схеме размещаем датчики контроля наличия-отсутствия материалов на транспортных конвейерах (в начале и в конце), датчик контроля работы транспортера (реле скорости), а также указываем параметры исполнительных устройств.
В бункерах есть наличие датчика верхнего и нижнего уровня, каждый из которых должен быть указан на технологической схеме.
В бункерах есть наличие датчика верхнего и нижнего уровня, каждый из которых должен быть указан на технологической схеме.
Верхние уровни Uрв1-Uрв2 в расходных бункерах не принимаются во внимание из-за технологических особенностей.
При нижнем уровне Uрн1-Uрн2, выполняется запрет на включение перегрузки материала.
Все шиберы Шр1-Шр4 имеют два параметра «открытый» и «закрытый». Так же каждый электропривод шиберной заслонки «включен» и «выключен». Эти параметры указываются рядом с соответствующим устройством.
По нижнему уровню Uпн1-Uпн2 включается загрузка материала из расходных бункеров (АМр1-Амр2) в приемные бункеры БМп1-БМп2. А по верхнему уровню Uпв1- Uпв2 процесс заполнения завершается.
На каждом транспортере располагается датчик контроля наличия-отсутствия материала (Мн1-Мн4, Мо1-Мо4) на соответствующем конвейере. Датчики установлены вначале транспортного конвейера и в конце. Каждый датчик отмечается на схеме с параметрами
Для контроля работы транспортеров, на них установлены датчики РКС: Тк1 и Тк2. Они обозначаются на схеме с параметрами «не работает» и «работает».
2.2.3 – Расшифровка обозначений на схеме
2.2.4 – Технологическая схема с индексацией
На рисунке 2 представлена технологическая схема КА с индексацией.
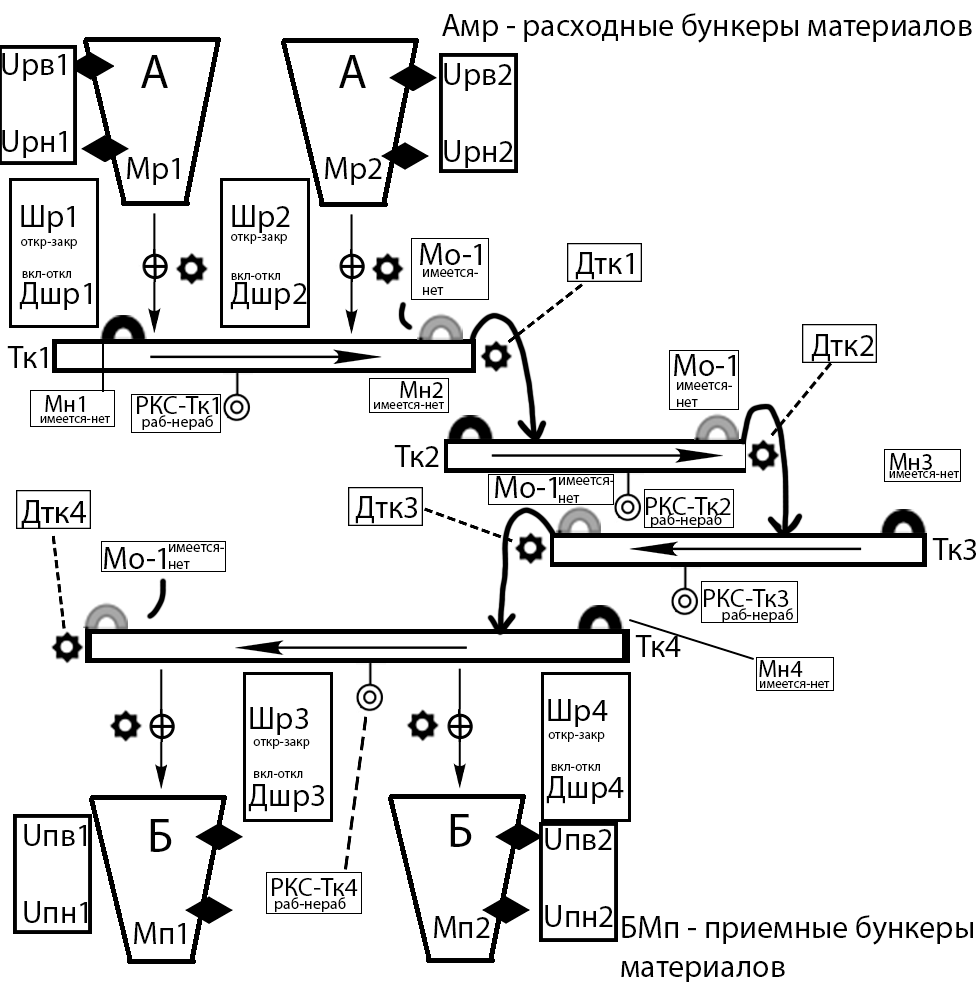
Рисунок 2 – технологическая схема КА с индексацией
2.2.5 – Структуризация технологической схемы
На данном этапе разработки присваивают дискретные индексы параметрам для каждого из входов, выходов и дискретных индексов промежуточных параметров, которые являются исходными данными математического описания конечного автомата и составляется полная технологическая схема. Каждое символьное обозначение находится в каждом моменте времени в дискретном состоянии.
Входы КА:
X1, X3 – мин. уровень высоты материала в бункерах БМп1-БМп2
X2, X4 – макс. уровень высоты материала в бункерах БМп1-БМп2
X5, X7 – мин. уровень высоты материала в бункерах АМр1-Амр2
X6*, X8* – макс. уровень высоты материала в бункерах АМр1-Амр2 (* - используется при условии особенности технологии)
X9, X11, X13, X15 – имеется наличие материала в начале транспортеров Тк1-Тк4
X10, X12, X14, X16 – имеется наличие материала в конце транспортеров Тк1-Тк4
X17, X18, X19, X20 – работают транспортеры Тк1-Тк4
X21, X22, X23, X24 – открыты шиберные затворы Шр1- Шр4
Промежуточные состояния КА:
Y1, Y2, Y3, Y4 – система транспортных конвейеров Тк1-Тк4 в работе
Y5, Y6, Y7, Y8 – включены электроприводы шиберных затворов Дшр1 – Дшр4
Выход КА:
Z – система в целом работает на подачу материалов
На рисунке 3 представлена полная технологическая схема.
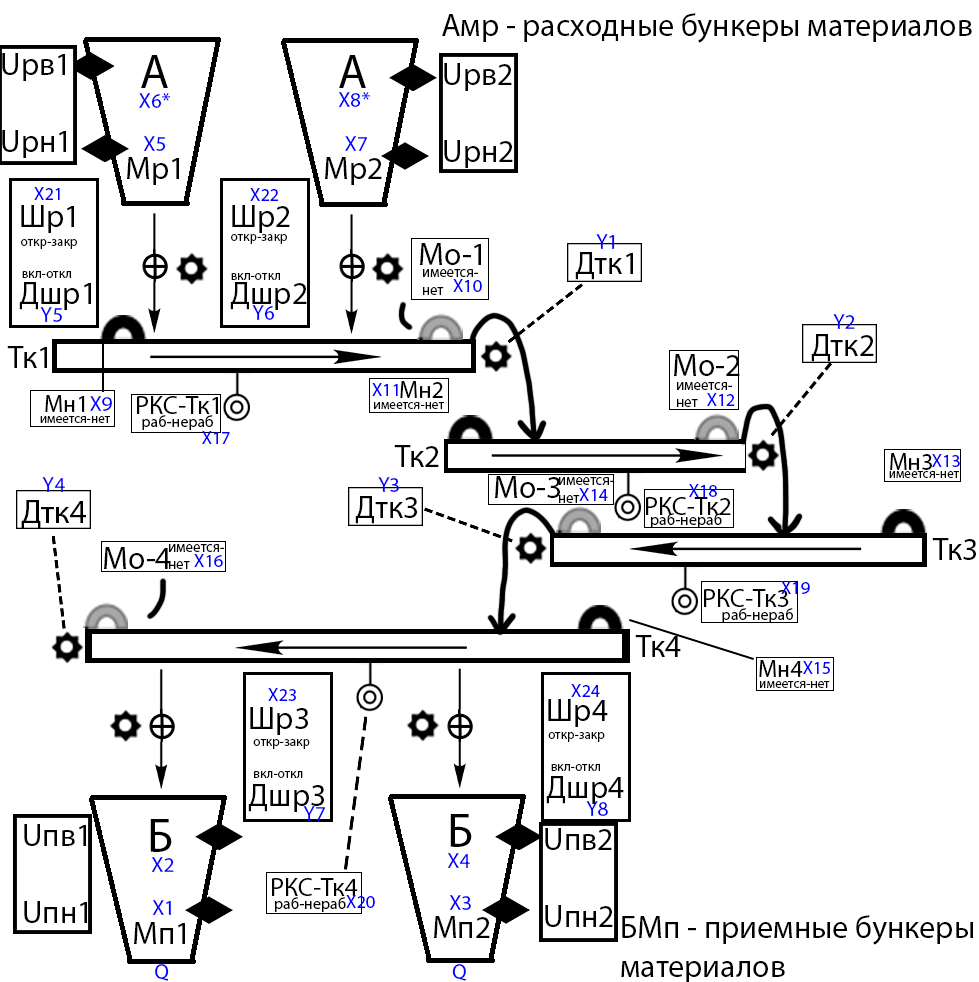
Рисунок 3 – Полная технологическая схема
2.2.6 – Описание функций состояния технологического процесса (по технологическим группам объектам)
* - расходные бункеры всегда полны по умолчанию.
** - в расходных бункерах не учитывать верхний уровень. (Это иная техническая задача)
В таблице 1 представлено описание функций переходов КА и условия этих переходов для каждого проиндексированного элемента.
Таблица 1
Продолжение таблицы 1
Функция переходов - определяет состояние автомата a(t + 1) в момент дискретного времени t + 1 в зависимости от состояния автомата a(t) и значения входного сигнала x(t) в момент времени t| a(t + 1) = f[a(t), x(t)].
Функция выходов - определяет зависимость выходного сигнала автомата y(t) от состояния автомата a(t) и входного сигнала x(t) в момент времени t:
y(t) = φ 1 [a(t), x(t)] или y(t) = φ2 [a(t)].
Автомат Мили - синхронный автомат, у которого выходные сигналы зависят как от состояния автомата, так и от значения входного сигнала:
y(t) = φ 1 [a(t), x(t)]; a(t + 1) = f[a(t), x(t)].
Автомат Мура - синхронный автомат, выходные сигналы которого в момент времени t однозначно определяются состоянием автомата в этот же момент времени и в явном виде не зависят от значений входных сигналов:
y(t) = φ 2 [a(t)]; a(t + 1) = f[a(t), x(t)].
Совмещенный автомат (С-автомат) - отличается от автоматов Мили и Мура тем, что он одновременно реализует две функции выходов φ 1 и φ 2, каждая из которых характерна для этих автоматов в отдельности.
Триггер – элемент или элементарный автомат (например, Мура), имеющий два внутренних устойчивых состояния, соответствующих логическим 1 и 0, т.е. логический элемент запоминания.
Комбинационным автоматом (КА) называют логическую цепь, имеющую в общем случае несколько входов и выходов, в которой значения выходных переменных у в каждый момент времени однозначно определяются набором входных переменных х в тот же момент времени:
X = λ(Y), где λ некоторый оператор преобразования входных переменных X (элементы множества x1, x2, x3…xn) в выходные Y (элементы множества y1, y2, y3…yn).
Задача логического проектирования (синтеза) КА, реализующего требуемый оператор преобразования входных переменных в выходные, состоит в определении оптимальной структуры автомата для заданного перечня логических элементов (заданной элементной базы). Оптимальной принято считать структуры автомата, содержащие их минимальное число.
2. ПРАКТИЧЕСКАЯ ЧАСТЬ
2.1 Исходные данные
Условия функционирования системы:
-
Количество расходных бункеров m – 2 -
Количество приемных бункеров n – 2 -
Количество транспортных конвейеров m – 4 -
Количество шиберных заслонов z - 4
Датчики контроля транспортной системы:
-
Контроль нижнего уровня в бункерах kn – 4 -
Контроль верхнего уровня в бункерах kv – 4 -
Контроль материалов в начале транспортера ktn – 4 -
Контроль материалов в конце транспортера ktk – 4 -
Контроль работы транспортера (реле скорости) rks - 4
Электроприводы исполнительных устройств транспортной системы:
-
Приводы шиберных затворов dz - 4 -
Приводы транспортных конвейеров dt - 4
2.2 Выполнение курсовой работы
2.2.1 Технологическая схема
На рисунке 1 изображена технологическая схема КА, она описывает первичную схему без индексов.
Рисунок 1 – технологическая схема без индексов
2.2.2 - Присвоение технологических индексов
На схеме размещаем датчики контроля наличия-отсутствия материалов на транспортных конвейерах (в начале и в конце), датчик контроля работы транспортера (реле скорости), а также указываем параметры исполнительных устройств.
В бункерах есть наличие датчика верхнего и нижнего уровня, каждый из которых должен быть указан на технологической схеме.
В бункерах есть наличие датчика верхнего и нижнего уровня, каждый из которых должен быть указан на технологической схеме.
Верхние уровни Uрв1-Uрв2 в расходных бункерах не принимаются во внимание из-за технологических особенностей.
При нижнем уровне Uрн1-Uрн2, выполняется запрет на включение перегрузки материала.
Все шиберы Шр1-Шр4 имеют два параметра «открытый» и «закрытый». Так же каждый электропривод шиберной заслонки «включен» и «выключен». Эти параметры указываются рядом с соответствующим устройством.
По нижнему уровню Uпн1-Uпн2 включается загрузка материала из расходных бункеров (АМр1-Амр2) в приемные бункеры БМп1-БМп2. А по верхнему уровню Uпв1- Uпв2 процесс заполнения завершается.
На каждом транспортере располагается датчик контроля наличия-отсутствия материала (Мн1-Мн4, Мо1-Мо4) на соответствующем конвейере. Датчики установлены вначале транспортного конвейера и в конце. Каждый датчик отмечается на схеме с параметрами
Для контроля работы транспортеров, на них установлены датчики РКС: Тк1 и Тк2. Они обозначаются на схеме с параметрами «не работает» и «работает».
2.2.3 – Расшифровка обозначений на схеме
-
Upв1 – Uрв2 – верхний уровень в расходных бункерах Амр1 – Амр2 -
Uрн1 – Uрн2 – нижний уровень в расходных бункерах Амр1 – Амр2 -
Uпв1 – Uпв2 – верхний уровень в приемных бункерах БМп1 – Бмп2 -
Uпн1 – Uпн2 – верхний уровень в приемных бункерах БМп1-БМп2 -
Мн-Мо – датчики контроля наличия-отсутствия материала на транспортерах. Мн (материал отсутствует (нет материала)) – устанавливается в начале транспортера с параметром имеется или отсутствует. Мо – устанавливается в конце транспортера с параметром имеется или отсутствует. -
РКС Тк1-РКС Тк4 – реле контроля скорости на транспортерах Тк1-Тк4
2.2.4 – Технологическая схема с индексацией
На рисунке 2 представлена технологическая схема КА с индексацией.
Рисунок 2 – технологическая схема КА с индексацией
2.2.5 – Структуризация технологической схемы
На данном этапе разработки присваивают дискретные индексы параметрам для каждого из входов, выходов и дискретных индексов промежуточных параметров, которые являются исходными данными математического описания конечного автомата и составляется полная технологическая схема. Каждое символьное обозначение находится в каждом моменте времени в дискретном состоянии.
Входы КА:
X1, X3 – мин. уровень высоты материала в бункерах БМп1-БМп2
X2, X4 – макс. уровень высоты материала в бункерах БМп1-БМп2
X5, X7 – мин. уровень высоты материала в бункерах АМр1-Амр2
X6*, X8* – макс. уровень высоты материала в бункерах АМр1-Амр2 (* - используется при условии особенности технологии)
X9, X11, X13, X15 – имеется наличие материала в начале транспортеров Тк1-Тк4
X10, X12, X14, X16 – имеется наличие материала в конце транспортеров Тк1-Тк4
X17, X18, X19, X20 – работают транспортеры Тк1-Тк4
X21, X22, X23, X24 – открыты шиберные затворы Шр1- Шр4
Промежуточные состояния КА:
Y1, Y2, Y3, Y4 – система транспортных конвейеров Тк1-Тк4 в работе
Y5, Y6, Y7, Y8 – включены электроприводы шиберных затворов Дшр1 – Дшр4
Выход КА:
Z – система в целом работает на подачу материалов
На рисунке 3 представлена полная технологическая схема.
Рисунок 3 – Полная технологическая схема
2.2.6 – Описание функций состояния технологического процесса (по технологическим группам объектам)
* - расходные бункеры всегда полны по умолчанию.
** - в расходных бункерах не учитывать верхний уровень. (Это иная техническая задача)
В таблице 1 представлено описание функций переходов КА и условия этих переходов для каждого проиндексированного элемента.
Таблица 1
| ОПИСАНИЕ ФУНКЦИЙ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА КА | СИМВОЛЬНОЕ ОПИСАНИЕ ПАРАМЕТРОВ ВХОДОВ КА | ||||||||||||||||
| Индекс | Технологическое описание состояний | Символьный дискретный Индекс (СДИ) | Технологическая функция (Значение в КА) | Описание функции состояний и переходов | |||||||||||||
| Вход КА (параметры технологии) /пассивные параметры – статические входы/ | (q) φ | Ψ | Такт | ||||||||||||||
| Параметры входа базовые (X) | | | 1 | 2 | 3 | 4 | 5 | ||||||||||
| Uпн1 | В приемном бункере БМп1 материала Ниже min |  | Прием (1) |  ∨ ∨ | | | | | | | |||||||
 | | | | | | | |||||||||||
| В приемном бункере БМп1 материала Выше min |  | Прием (0) |  ∨ ∨ | | | | | | | ||||||||
 | | | | | | | |||||||||||
| Uпв1 | В приемном бункере БМп1 материала Выше max |  | Прием (1) |  ∨ ∨ | | | | | | | |||||||
 | | | | | | | |||||||||||
| В приемном бункере БМп1 материала Ниже max |  | Прием (0) |  ∨ ∨ | | | | | | | ||||||||
 | | | | | | | |||||||||||
| Uпн2 | В приемном бункере БМп2 материала Ниже min |  | Прием (1) |  ∨ ∨ | | | | | | | |||||||
 | | | | | | | |||||||||||
| В приемном бункере БМп2 материала Выше min |  | Прием (0) |  ∨ ∨ | | | | | | | ||||||||
 | | | | | | | |||||||||||
| Uпв2 | В приемном бункере БМп2 материала Выше max |  | Прием (1) |  ∨ ∨ | | | | | | | |||||||
 | | | | | | | |||||||||||
| В приемном бункере БМп2 материала Ниже max |  | Прием (0) |  ∨ ∨ | | | | | | | ||||||||
 | | | | | | | |||||||||||
| Uрн1 | В приемном бункере БМп1 материала Ниже min |  | Прием (1) |  ∨ ∨ | | | | | | | |||||||
 | | | | | | | |||||||||||
| В приемном бункере АМр1 материала Выше min |  | Прием (0) |  ∨ ∨ | | | | | | | ||||||||
 | | | | | | | |||||||||||
Продолжение таблицы 1
| Uрв1 | В приемном бункере АМр1 материала Выше max |  | Прием (1) |  ∨ ∨ | | | | | | |
 | | | | | | | ||||
| В приемном бункере БМп3 материала Ниже max |  | Прием (0) |  ∨ ∨ | | | | | | | |
 | | | | | | | ||||
| Uрн2 | В приемном бункере БМп4 материала Ниже min |  | Прием (1) |  ∨ ∨ | | | | | | |
| В приемном бункере БМп4 материала Выше min |  | Прием (0) |  ∨ ∨ | | | | | | | |
| Uрв2 | В приемном бункере БМп4 материала Выше max |  | Прием (1) |  ∨ ∨ | | | | | | |
 | | | | | | | ||||
| В приемном бункере БМп4 материала Ниже max |  | Прием (0) |  ∨ ∨ | | | | | | | |
 | | | | | | | ||||
| Мн4 | Наличие материала в начале Тк4 |  | (1) |  | | | | | | |
| Отсутствие материала в начале Тк4 |  | (0) |  | | | | | | | |
| Мо4 | Наличие материала в конце Тк4 |  | (1) |  | | | | | | |
| Отсутствие материала в конце Тк4 |  | (0) |  | | | | | | | |
| РКС Тк4 | Транспортный конвейер Тк4 работает |  | (1) |  | | | | | | |
| Транспортный конвейер Тк4 не работает |  | (0) |  | | | | | | | |
| Мн3 | Наличие материала в начале Тк3 |  | (1) |  | | | | | | |
| Отсутствие материала в начале Тк3 |  | (0) |  | | | | | | | |
| Мо3 | Наличие материала в конце Тк3 |  | (1) |  | | | | | | |
| Отсутствие материала в конце Тк3 |  | (0) |  | | | | | | |