ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 05.12.2023
Просмотров: 88
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Введение.
При проектировании систем стабилизации и управления летательных аппаратов важным этапом является выявление динамических свойств летательного аппарата (ЛА) как объекта управления. Имеется обширная отечественная и зарубежная литература, посвященная построению математической модели динамики движения летательного аппарата.
Настоящие методические указания облегчают работу с этой литературой, дают рациональные приемы вывода уравнений движения ЛА и их линеаризации.
§ 1. Системы координат, применяемые в динамике полета.
Задачи динамики полета самолетов и ракет рассматриваются обычно в топоцентрической системе отсчета. Начало топоцентрической системы координат помещается в пункте наблюдения, в частности, на поверхности земного шара. Эта система используется в тех случаях, когда рассматривается движение по отношению к поверхности Земли.
I. Земная система координат.
Частный случай топоцентрической системы координат – земная система координат. Земных координат несколько. За начало земной системы прямоугольных координат можно принимать центр масс Земли, точку старта или другую неподвижную относительно Земли точку. Выберем земную систему координат следующим образом (рис. 1).
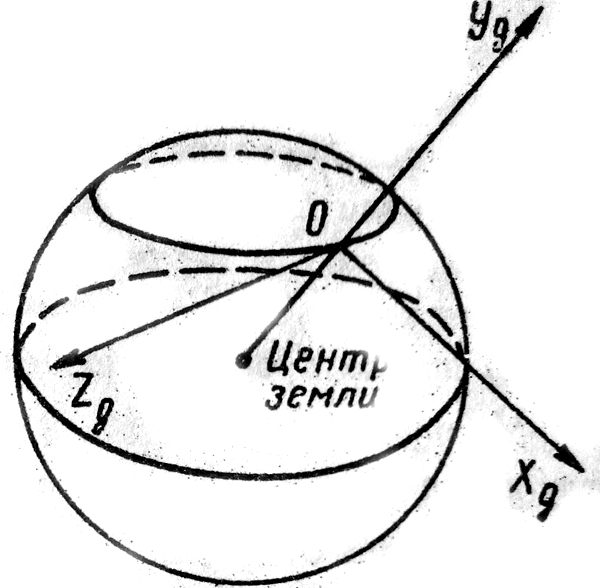
Рис. 1. Земная система координат
Ось OYg – прямая, соединяющая центр Земли с точкой старта на её поверхности. Ось OXg перпендикулярна оси OYg и лежит в вертикальной плоскости прицеливания или начального движения ЛА в момент старта. Ось OZg дополняет систему до правой. Такая система координат называется нормальной земной системой координат OXgYgZg. Часто начало координат нормальной земной системы помещают в центре масс ЛА, а направление её осей совпадает с начальным направлением этих осей в момент старта. Таким образом, определяется нормальная система координат OXgYgZg, а её оси в данном случае совпадают также с осями стартовой системы OXcYcZc. В дальнейшем нормальную систему будем обозначать индексом g.
Задав оси системы координат, можно выбрать базис, в котором любой вектор запишется так:
где
,
II. Связанная система координат
Начало связанной системы координат (рис. 2) помещают в центре масс ЛА, который будем считать неподвижным относительно корпуса ЛА. Ось OX направлена вдоль строительной оси корпуса ЛА вперед. Ось OY располагают в той плоскости симметрии ЛА, которая в момент пуска совпадает с плоскостью стрельбы. Ось OY перпендикулярна оси OX и направлена вверх. Ось OZ дополняет систему до правой. Связанная система координат неподвижна относительно корпуса ЛА. Обозначать её будем индексом I.
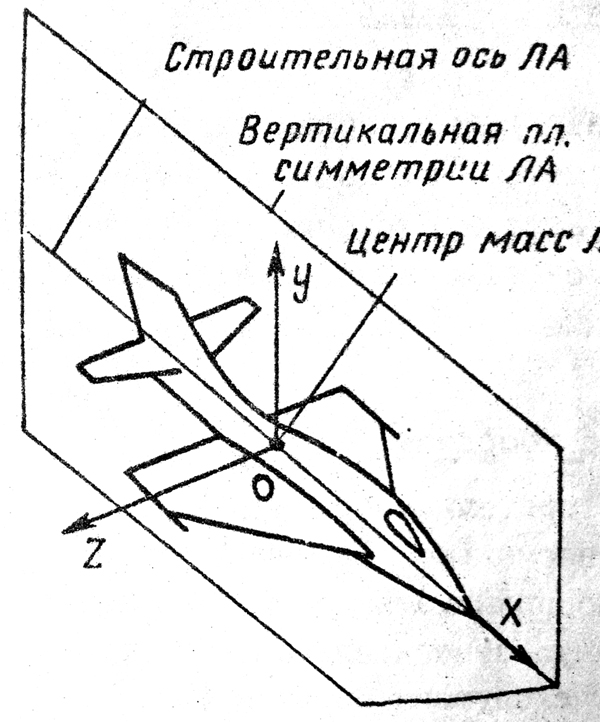
Рис. 2. Связная система координат
III. Скоростная система координат
В скоростной системе координат (рис. 3) ось OXa совпадает с направлением вектора скорости полёта центра масс ЛА и закреплена в центре масс, ось OYa перпендикулярна ей, лежит в вертикальной плоскости симметрии ЛА и направлена вверх. Ось OZa перпендикулярна осям OXa и OYa и дополняет их до правой тройки. Скоростую систему будем обозначать индексом a.
IV. Траекторная система координат
В траекторной системе координат (рис. 4) ось OXk, как и в скоростной, совпадает с направлением вектора скорости, ось OYk направлена перпендикулярно ей и лежит в местной вертикальной плоскости, ось OZk перпендикулярна первым двум, лежит в горизонтальной плоскости и направлена в сторону правого крыла.
Траекторную систему обозначим индексом k.
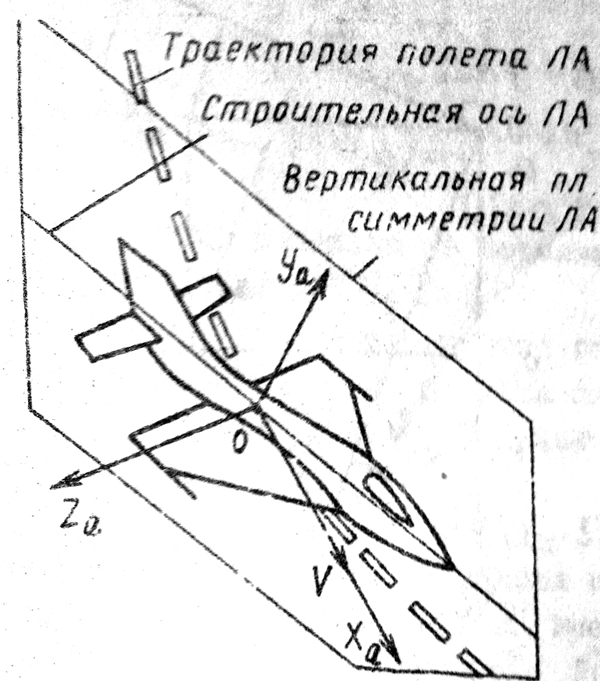
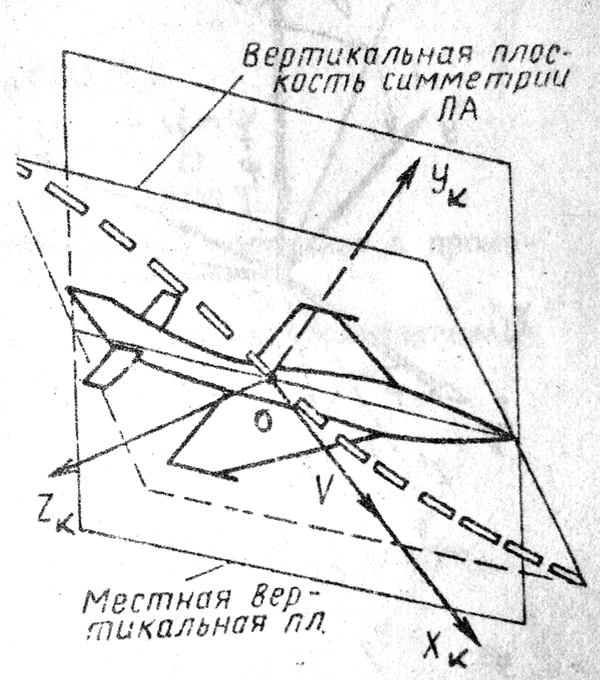
Рис. 3. Скоростная система координат Рис. 4. Траекторная система координат
§ 2. Связь между системами координат
Определенные в § 1 системы координат являются ортогональными, поэтому переход из системы координат A в систему координат B характеризуется ортогональным преобразованием
Для ортогональных матриц справедливо:
1. Как видно из рис. 5, связанная и нормальная системы связаны между собой через углы Эйлера.
Обычно принимается следующий порядок поворота координатных осей.
1) Поворот вокруг оси OYg на угол
2) Поворот на угол
3) Поворот на угол
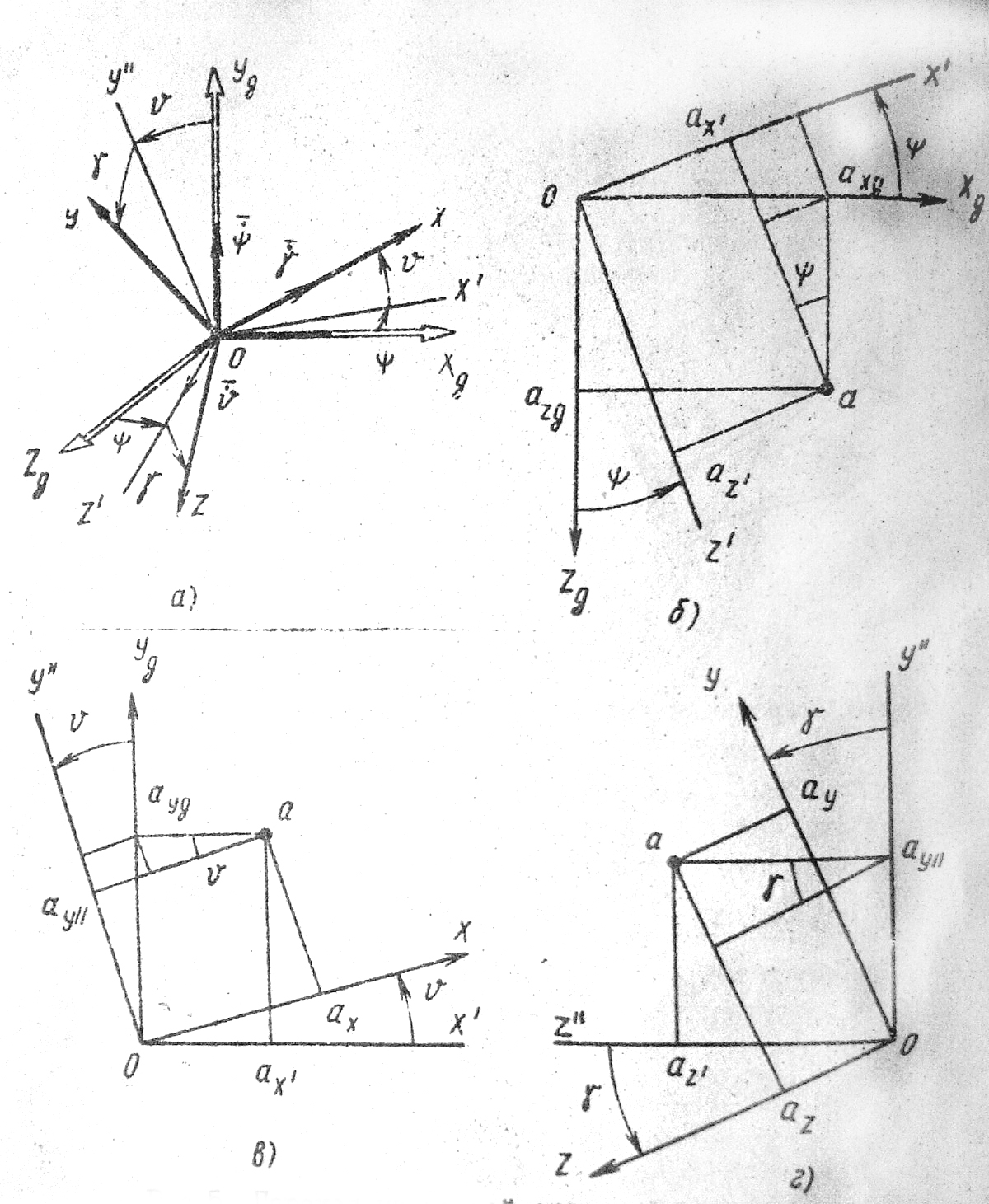
Рис. 5. Переход из земной системы координат в связанную.
Найдем матрицу T(1,g) перехода из нормальной системы координат в связанную (рис. 5а). Первый поворот происходит в плоскости OXgYg на угол
Таким образом,
– это матрица перехода из нормальной системы координат в промежуточную систему OX'YgZ'.
На рис. 5в иллюстрируется второй поворот на угол тангажа
Таким образом, матрица перехода из системы OX'YgZ' во вторую промежуточную систему OXY''Z' имеет вид
 .
.И, наконец, поворот на угол крена
вокруг оси OX приводит к переходу в связанную систему координат (рис. 5г):
Матрица перехода из системы OXY''Z' в систему OXYZ имеет вид:
Найдем искомую матрицу:

2. Скоростная и нормальная системы координат (рис. 6) связаны между собой через три угла Эйлера, которые перечислены в порядке последовательности поворотов:
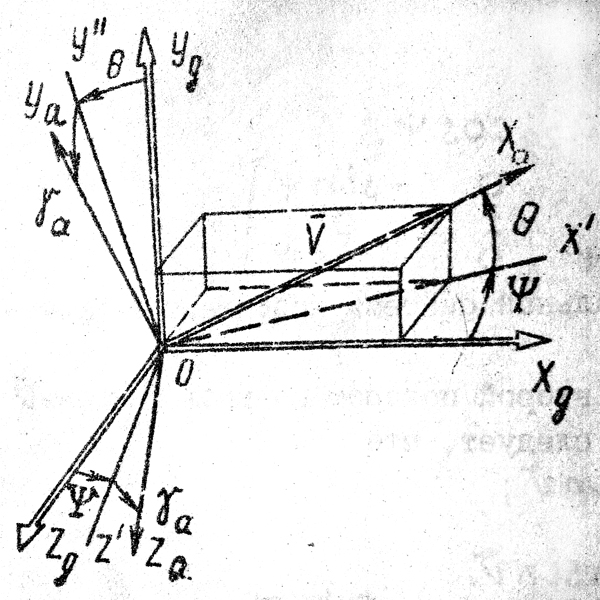
Рис. 6. Переход из нормальной системы координат в скоростную
Нетрудно видеть, что матрицу перехода из нормальной системы координат в скоростную T(a,g) можно получить из известной уже матрицы T(1,g) путём соответственной замены углов
:

3. Траекторную систему координат можно получить из нормальной с помощью двух последовательных поворотов на углы
Матрицу перехода из нормальной в траекторную систему координат T(k,g) можно получить из матрицы T(a,g), положив в ней
А матрицу перехода с траекторной системы к скоростной T(a,k) получим как матрицу третьего поворота на угол
4. Связанная система координат может быть получена из скоростной системы координат с помощью двух последовательных поворотов – на углы
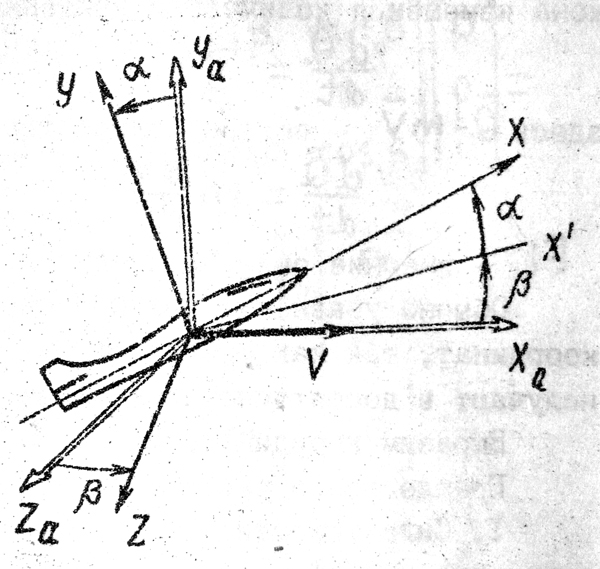
Рис. 7. Переход из скоростной системы в связанную
Матрицу T(1,a) перехода из скоростной системы координат в связанную, запишем так же, как и матрицу T(k,g) перехода из нормальной системы в траекторную, заменив в последней углы