Файл: Экзаменационные вопросы Перечислите принципы управления и поясните их.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 06.12.2023
Просмотров: 88
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
7. Что представляет собой система управления?
Ответ:
Система управления представляет собой совокупность объекта управления, регулятора и датчика рассогласования. Типовая автоматическая система может быть представлена в следующем виде (рис.1.6).
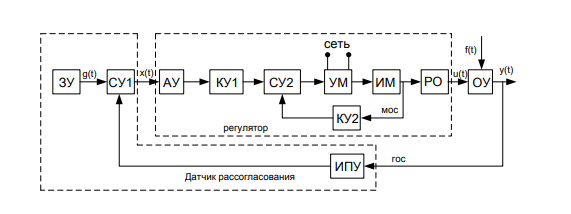
Рис. 1.6. Функциональная схема типовой автоматической системы
Координаты (переменные) системы:
g(t) –задающее воздействие;
y(t) – управляемая величина;
f(t) – возмущающее воздействие;
x(t) = g(t) - y(t) – рассогласование;
u(t) – управляющее воздействие.
8. Перечислите основные элементы системы автоматического управления
Ответ:
Функциональные элементы системы:
ОУ – объект управления;
ЗУ – задающее устройство;
ИПУ – измерительно-преобразовательное устройство;
СУ1, СУ2 – сравнивающие устройства;
РО – регулирующий орган, представляет собой техническое
устройство, которое действует на объект управления и непосредственно изменяет управляемую величину y(t);
ИМ – исполнительный механизм, представляет собой техническое устройство, воздействующее на регулирующий орган;
УМ – усилитель мощности, представляет собой техническое устройство, которое питает энергией исполнительный механизм;
АУ – амплитудный усилитель, устройство, обеспечивающее требуемую чувствительность системы и, в конечном счете, точность ее работы;
КУ1, КУ2 – корректирующие устройства, включаются в систему для того, чтобы сформировать требуемый закон управления для реализации заданного качества управления;
ГОС – главная обратная связь, реализуется измерительнопреобра-зовательным устройством и обеспечивает передачу информации об управляемой величине на вход системы;
МОС – местная или внутренняя обратная связь.
В настоящее время для управления широко используется вычислительная техника, которая позволяет программно реализовать задающее устройство, амплитудный усилитель, сравнивающие и корректирующие устройства. Остальные функциональные элементы реализуются аппаратно.
ЗУ, ИПУ и СУ1 образуют датчик рассогласования ДР.
Все остальные функциональные элементы за исключением объекта управления составляют регулятор R. Регулятор, в котором датчик рассогласования может непосредственно (без дополнительного источника энергии) воздействовать на регулирующий орган, называется регулятором прямого действия.
Таким образом, любую систему управления, рассматриваемую как совокупность объекта управления ОУ, датчика рассогласования ДР и регулятора R, можно изобразить в виде упрощенной функциональной схемы (рис. 1.7).
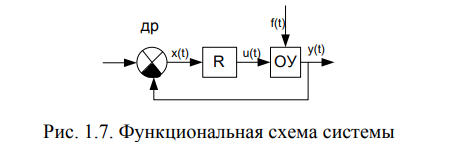
Элементы системы:
ОУ – объект управления;
ДР - датчик рассогласования;
R – регулятор.
Координаты (переменные) системы:
g(t) – задающее воздействие;
y(t) – управляемая (регулируемая) величина;
f(t) – возмущающее воздействие;
x(t) - рассогласование (ошибка);
u(t) – управляющее воздействие.
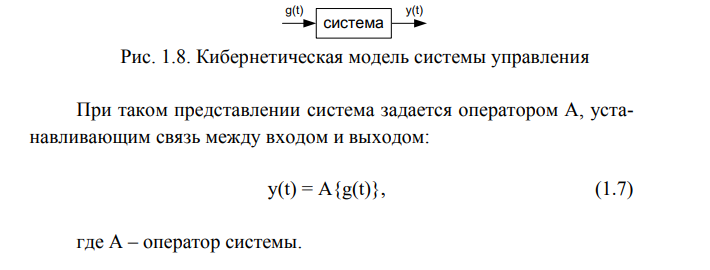
Еще в более общем виде систему управления можно рассматривать как ”черный ящик” (рис. 1.8), преобразующий задающее воздействие в управляемую величину.
9. Каково назначение математического описания систем?
Ответ :
Целью математического описания САУ является составление математической модели, используемой для анализа и синтеза САУ. Любая математическая модель является, приближением к действительному состоянию взаимодействия отдельных информационных параметров объекта или всей системы в целом и отражает наиболее существенные взаимосвязи между переменными величинами.
Различают следующие виды математических моделей САУ:
1. дифференциальные и разностные уравнения систем управления и их элементов;
2. векторно-матричные модели в пространстве состояний;
3. передаточные функции элементов и систем управления;
4. структурные схемы систем управления;
5. направленные графы систем управления;
6. временные характеристики САУ;
7. частотные характеристики САУ.
Эти же виды математических моделей используются и для описания нелинейных САУ.
10. Что такое динамика системы?
Ответ:
Для анализа и синтеза системы управления требуется ее математическое описание, которое бы связывало поведение координат системы - ее переменных величин в процессе работы, то есть во времени. Поведение координат системы во времени называется динамикой системы. Так как система состоит из взаимосвязанных функциональных элементов, то для получения ее математического описания необходимо получить математические описания отдельных элементов. Математическое описание элемента устанавливает связь во времени между его текущими значениями выходных y(t) и входных x(t) величин. Динамика элемента, то есть поведение его координат во времени, описывается дифференциальными уравнениями. В динамике связь между координатами, то есть между входными и выходными величинами, меняется во времени. Динамика характеризуется переходным процессом. При времени, стремящемся к бесконечности t, текущие координаты y(t) и x(t) принимают постоянные установившиеся значения и наступает статика элемента, которая описывается алгебраическими уравнениями. В статике входные и выходные величины элемента постоянные: x()=x0=const; y()=y0=const. Эти постоянные величины называются установившимися. А процесс, соответствующий статике, называется установившимся процессом. Теоретически статика наступает при t, однако на практике принято считать, что статика наступает тогда, когда текущие координаты отличаются от своих установившихся значений не более чем на 5%. Динамическое уравнение отдельного элемента составляется по правилам соответствующей технической науки (элемент может пред- 21 ставлять собой электрическую машину, механическую передачу, нагревательный прибор, электрическую цепь, электронную схему и т.п.).
11. Как перейти от дифференциального уравнения к операторному?
Ответ:
Чтобы произвести расчет САУ, надо иметь математическую модель системы. Обычно математической моделью является дифференциальное уравнение, которое получают, анализируя физический, механический или иной процесс.
Операторное уравнение получают, применяя преобразование Лапласа к дифференциальному уравнению.
Суть преобразования Лапласа в том, что функцию от времени
преобразуют в функцию от комплексного временного
 (
( −действительная часть, − мнимая часть, j = 1).
−действительная часть, − мнимая часть, j = 1). Функцию от времени называют «оригинал», а ее преобразование по Лапласу – «изображение».
Для изображения используют прописные буквы.
Символически преобразование Лапласа принято обозначать прописной буквой L. Например,
L= {x(t)}= X( p), L{y(t)}=Y( p), L{ f (t)}= F( p).
12. Дайте определение передаточной функции.
Ответ:
Передаточная функция – одна из основных динамических характеристик объекта
регулирования.
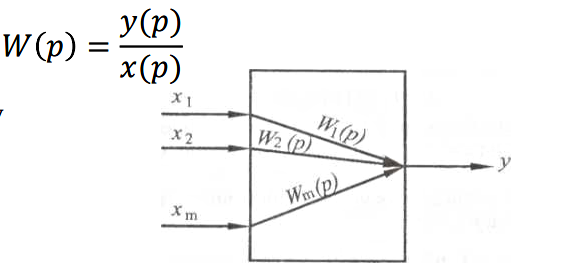
Передаточной функцией объекта W(p) называется отношение преобразованного по
Лапласу выхода объекта у(р) к преобразованному по Лапласу входу x(р).
Передаточная функция является функцией комплексного переменного.
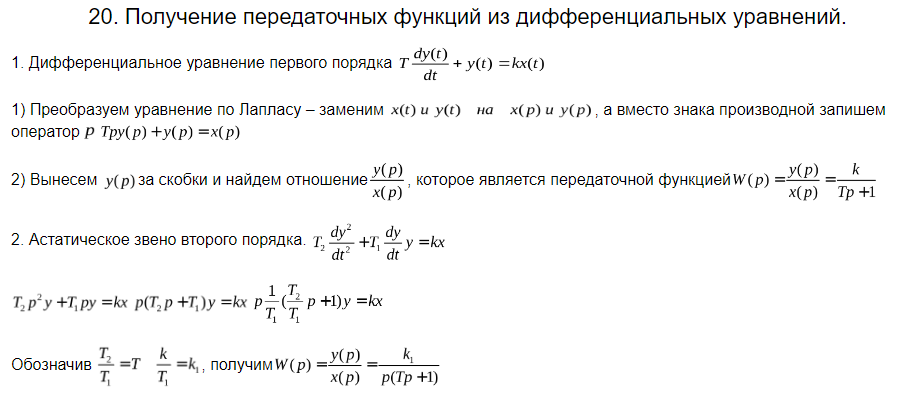
13. Как по дифференциальному уравнению звена найти его передаточную функцию?
Ответ:
14. Что такое динамическое звено и его характеристика?
Ответ:
Динамическим звеном называют устройство любого физического типа и конструктивного оформления, которое описывается определённым дифференциальным уравнением.
Согласно определению динамические звенья классифицируются по типу дифференциальных уравнений или по их порядку. То есть устройства разных типов могут быть описаны одинаковыми дифференциальными уравнениями. Основными параметрами динамических звеньев являются постоянные коэффициенты дифференциальных уравнений. Буквой Т обозначается постоянная времени , а буквой k коэффициент передачи. Соединяться динамические звенья могут 3 способами: Последовательно, параллельно и в виде обратной связи.
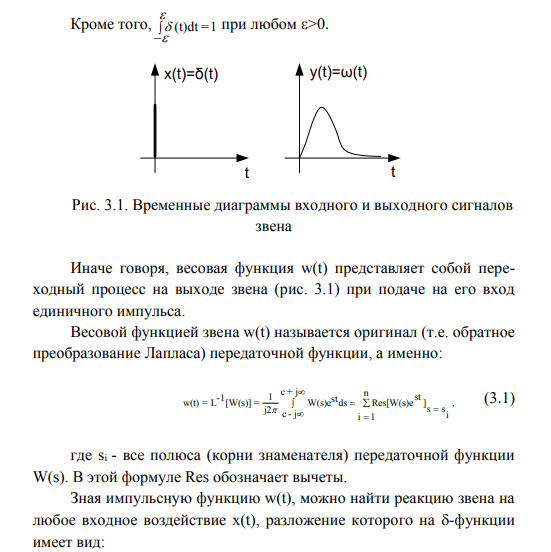
15. Дайте определение основных характеристик.
Ответ:
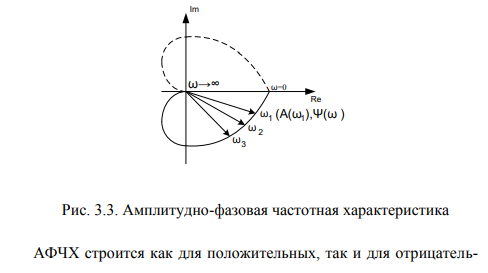
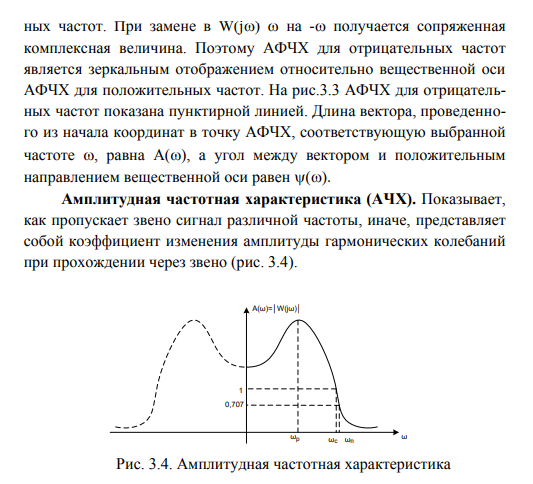
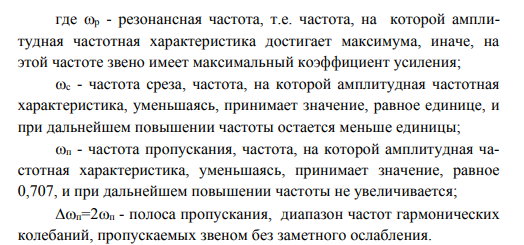
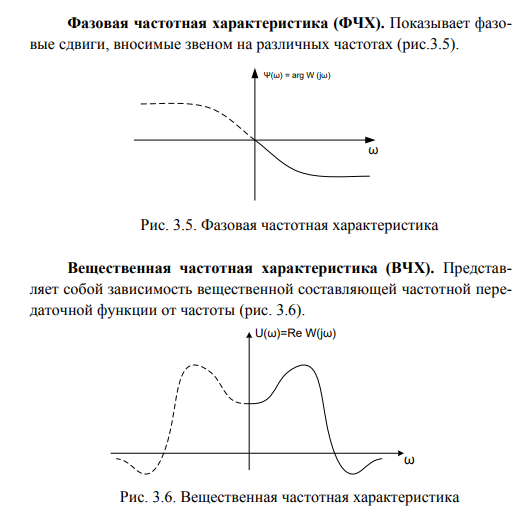

16. Какие частотные характеристики используются для исследования систем?
Ответ:
Для исследования систем используются: Частотная передаточная функция (ЧПХ), Амплитудно-фазовая частотная характеристика (АФЧХ), Амплитудная частотная характеристика (АЧХ), Фазовая частотная характеристика (ФЧХ), Вещественная частотная характеристика (ВЧХ), Мнимая частотная характеристика (МЧХ), Логарифмические частотные характеристики (ЛЧХ), логарифмической амплитудной частотной характеристики (ЛАХ) и логарифмической фазовой частотной характеристики (ЛФХ).
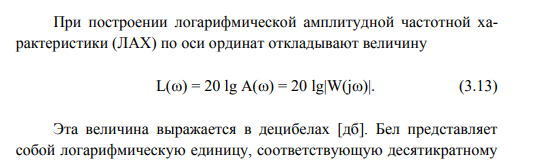
17. Почему ЛЧХ нашли большое применение в инженерной практике?
Ответ:
Метод исследования устойчивости с помощью логарифмических частотных характеристик получил широкое распространение в инженерной практике. Это обусловлено тем, что построение логарифмических частотных характеристик значительно проще, чем построение годографа амплитудно-фазовых характеристик.
18. По каким признакам классифицируются типовые динамические звенья?
Ответ:
Динамическим звеном называют устройство любого физического вида и конструктивного оформления, представленное определенным дифференциальным уравнением.
Типовым называется такое звено, которое описывается дифференциальным уравнением не выше второго порядка.
В соответствии с определением классификация динамических звеньев производится по виду дифференциального уравнения, а именно, по его порядку. Так как одними и теми же дифференциальными уравнениями могут описываться устройства любого типа (электрические, электромеханические, гидравлические, тепловые), то такое предположение позволяет использовать для проектирования различных устройств одинаковые подходы.
19. Перечислите группы основных типов звеньев.
Ответ:
Любую систему можно представить в виде соединения типовых динамических звеньев. Число таких звеньев невелико и определяется типом нулей и полюсов.
Типовым называется такое звено, которое описывается дифференциальным уравнением не выше второго порядка. К таким звеньям относятся:
-
безынерционное звено – звено нулевого порядка, -
апериодическое звено – звено первого порядка, -
интегрирующее звено – звено первого порядка,
-
дифференциальное звено – звено первого порядка, -
колебательное звено – звено второго порядка. -
1. Уравнение движения для безинерционного звена имеет вид

2. Уравнение движения для апериодического звена имеет вид
3. Уравнение движения для интегрирующего звена имеет вид

4. Уравнение движения для дифференцирующего звена имеет вид

5. Уравнение движения для колебательного звена имеет вид
20. Что представляет собой структурная схема системы управления?