Файл: Лекция 34. Принцип действия системы автоматического управления курсом судна. Комплектация, назначение. Принцип действия авторулевого Печора.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 06.12.2023
Просмотров: 174
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Лекция № 34.
Принцип действия системы автоматического управления курсом судна. Комплектация, назначение. Принцип действия авторулевого «Печора».
Все суда морского транспортного флота в настоящее время оборудуются системами автоматического управления (САУ) курсом судна. Основным элементом САУ является прибор управления (авторулевой).
При правильной настройке авторулевой обеспечивает снижение потерь ходового времени до 3 % за счёт более точного удержания судна на заданном курсе и уменьшения тормозящего действия корпуса и руля. Углы перекладки руля при автоматическом управлении на 20 - 30 % меньше, чем при ручном.
Автоматический рулевой работает от основного прибора гирокомпаса.
Авторулевой - прибор, предназначенный для автоматического управления судовым рулевым приводом и, следовательно, автоматически, без участия рулевого матроса, удерживающий судно на заданном курсе. Авторулевой также производит повороты и изменения курса на заданную величину.
В соответствии с полученным от датчика авторулевого сигналом рулевой привод совершает перекладку руля на определенный угол в сторону, противоположную уходу судна с курса. Как только судно начнет возвращаться на заданный курс, авторулевой отведёт руль, затем, удерживая его, переложит руль в противоположную сторону. Основной режим работы авторулевого - автоматический.
Обычно в нормальных условиях плавания судно рыскает вправо и влево на одно и то же число градусов. Но в других условиях плавания бывают случаи несимметричного рысканья.
Так, в штормовую погоду при качке на волнении, когда судно постоянно рыскает в каждую сторону на разное число градусов, у авторулевого предусмотрена регулировка его чувствительности на изменение курса от рысканья. Подобная регулировка позволяет судну в штормовую погоду совершать небольшие отклонения от курса.
Наиболее распространенный тип авторулевого, устанавливаемого на судах среднего и крупного тоннажа, - автоматический бесконтактный рулевой (АБР). Основной прибор АБР - пульт управления (рис. 1) - устанавливается в рулевой рубке.
Пульт управления содержит все основные элементы автоматического устройства и регулирования. На верхней крышке в центре пульта расположен репитер гирокомпаса 4 и аксиометр 5 заданного положения руля. Слева расположены переключатель видов управления
2 с двумя положениями "Автомат" и "Следящее" и рукоятка регулятора чувствительности , справа-рукоятка регулятора тахометра 6. Кроме того, на крышке пульта находятся две сигнальные лампы 3, показывающие режим работы авторулевого. Спереди пульта имеется штурвал 7, предназначенный для перекладки руля при работе авторулевого в следящем режиме и для управления изменением курса при работе в режиме автоматического управления.
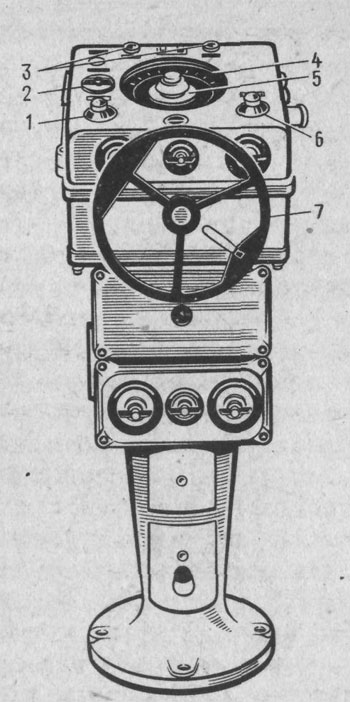
Рис. 1. Авторулевой
В последнее время на транспортных судах устанавливают авторулевые новых типов: АРМ-2 для малых и АТР для средне- и крупнотоннажных транспортных судов.
Все системы автоматического управления курсом судна, построенные на базе отечественных авторулевых АР, АТР, "Аист", работают в режиме стабилизации судна на заданном прямом курсе.
По мере развития и совершенствования методов программированного плавания эти же авторулевые могут быть использованы для обеспечения работы систем автоматического управления курсом судна в режиме слежения, когда судно не только следует заданным прямым курсом, но и автоматически выходит в расчетное время на новый заданный курс, совершая переход с одного курса на другой с заданной угловой скоростью поворота.
Авторулевые АР, АТР предназначены для работы в комплексе с гирокомпасами типа «Курс» и гироазимут-компасами "Вега", а авторулевые "Аист" также и с гирокомпасами "Амур". Авторулевые АР, АТР и "Аист" устанавливаются на вновь строящихся судах. Они имеют комбинированный пульт управления, совмещающий схемы автоматического и штатного управления. Все приборы, входящие в комплект авторулевых, имеют постоянную готовность к работе и рассчитаны на непрерывную эксплуатацию в течение плавания любой продолжительности.
В соответствии с международными требованиями системы автоматического управления курсом должна обеспечивать:
- переход с ручного управления на автоматическое и наоборот, с помощью не более чем двух органов управления за время не более 3 с. при любом положении пера руля.
- переход с автоматического на ручное управление при любых неисправностях в системе автоматического управления;
- фильтрацию сигналов управления для уменьшения числа кладок руля от рысканья при волнении;
При переходе с ручного управления на автоматическое авторулевой должен автоматически вести судно на заданный курс.
В соответствии с требованиями Конвенции “Солас - 74” необходимо не более чем за 2 ч до отхода судна в рейс производить проверку работы как основных, так и аварийных каналов управления рулём. При этом должны быть проверены основной и помогательный рулевые приводы, система станционного управления рулевым приводом, посты управления рулём на ходовом мостике, аварийное энергопитание, указатели положения руля, аварийная сигнализация, работа автоматических ограничителей угла перекладки руля, а также работа средств связи мостика с румпельным отделением.
Необходимо по меньшей мере раза 3 в мес. водить учения по аварийному управлению рулём, включая непосредственное управление из румпельного отделения по мандам с ходового мостика.
В особо опасных в навигационном отношении районах управления рулём левого и правого бортов должны работать одновременно.
Устройство авторулевых
САУ курсом судна состоит из прибора управления (ПУ), который обычно называется авторулевым, рулевого привода (РП) с управляющим органом — рулем, судна как объекта регулирования (ОР), а также внутренней (OC1) и внешней (ОС2) обратных связей (рис. 5.18).
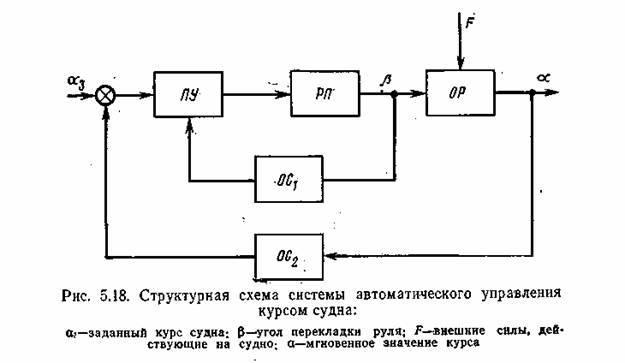
Прибор управления системы представляет собой вычислительное устройство, построенное на электромеханических и электронных элементах и вырабатывающее сигналы управления, пропорциональные по величине углу и угловой скорости отклонения судна от заданного курса.
В отечественных авторулевых, кроме того, имеется интегрирующее устройство, вырабатывающее сигнал, устраняющий нос судна при несимметричном рыскании.
На пульте управления авторулевого размещаются все необходимые органы настройки, контроля и управления системы.
На большинстве современных судов в качестве рулевого привода используются электрогидравлические рулевые машины, обеспечивающие перекладку руля со скоростью примерно 2,5—3 град/сек.
При одновременном включении насосов левого и правого бортов скорость перекладки руля увеличивается до 5 град/сек, что положительно влияет на управляемость судна, особенно на малом ходу.
Внутренняя обратная связь в системе осуществляется с помощью устройства, механически связанного с баллером руля и вырабатывающего электрический сигнал, пропорциональный углу поворота руля.
Внешняя обратная связь обеспечивается гирокомпасом, который преобразует изменение курса судна в угол поворота сельсина-датчика курса, связанного с сельсином-приемником в авторулевом.
Все существующие системы автоматического управления курсом судна, независимо от конструкции отдельных звеньев, работают по принципу отклонения, т. е. в авторулевом непрерывно сравниваются фактическое и заданное значения курса и вырабатывается сигнал управления. Под действием этого сигнала рулевой привод перекладывает руль и возвращает судно к заданному курсу. Сигнал внутренней отрицательной обратной связи останавливает перекладку руля, а затем возвращает руль в среднее положение.
Сигнал, пропорциональный скорости поворота судна, повышает чувствительность авторулевого при отклонении судна от заданного курса и обеспечивает сдерживание при возвращении на заданный курс.
Системы автоматического управления курсом удерживают судно на прямом заданном курсе в любую погоду при скорости хода более 5 узлов, а также позволяют изменять заданный курс при введении градусной поправки.
При правильной настройке авторулевой позволяет экономить до 3% ходового времени за счет более точного удержания судна на заданном курсе и уменьшения тормозящего действия корпуса и руля; углы перекладки руля при автоматическом управлении на 20—30% меньше, чем при ручном.
Современные авторулевые обеспечивают:
- автоматическое ведение судна по заданному курсу в течение морских переходов любой продолжительности при любой погоде (авторулевой не рассчитан на работу при движении судна на заднем ходу);
- управление рулевым приводом в зависимости от угла и скорости ухода судна с курса;
- автоматическое устранение сноса судна, вызванного несимметричным рысканием под действием ветра, волнения и других причин (кроме АРМ-2);
- изменение курса судна при автоматическом управлении на любую величину;
- управление рулевым приводом вручную, пользуясь штурвалом следящего управления (кроме АРМ-2);
- изменение курса судна при помощи выносных постов управления в случае внезапного появления опасности (в некоторых комплектациях АБР и АР).
Автоматические бесконтактные авторулевые АБР и АР
наиболее широко используются в настоящее время на транспортных судах.
Принципиальные схемы этих приборов аналогичны. Авторулевые АБР предназначаются для установки на судах, находящихся в эксплуатации либо построенных за рубежом, тогда как авторулевой АР устанавливается на вновь строящихся отечественных судах. АР имеет комбинированный пульт управления, совмещающий в себе схемы автоматического, следящего и штатного ручного управления.
Описания этих авторулевых даны в эксплуатационной документации, имеющейся на судах.
Авторулевой типизированного ряда АТР
устанавливается только на судах новой постройки, оборудованных электрогидравлическими рулевыми машинами типизированного ряда.
В систему АТР входит пульт управления — основной прибор, с помощью которого производится управление судном в автоматическом, следящем и простом режимах, а также настройка системы в процессе эксплуатации.
Пульт следящего управления—прибор, с помощью которого производится управление судном при следящем и простом режимах работы. Он устанавливается в кормовом запасном посту управления судном.
Исполнительный механизм (ИМ-1), предназначенный для управления насосом переменной производительности, или ИМ-2 — управляющий золотниковым устройством насосного агрегата постоянной производительности.
ИМ устанавливается в румпельном отделении. Рулевой датчик, механически связанный с баллером руля, вырабатывает сигналы внутренней отрицательной обратной связи.
Особенность системы АТР состоит в том, что она составляет единый комплекс с рулевой машиной типизированного ряда.
Вычислительная схема авторулевого АТР собрана на бесконтактных сельсинах типа БС-404А и имеет два полностью дублированных канала управления, что значительно повышает ее надежность.
В системе предусмотрены три режима управления:
- простой,
- следящий
- автоматический.
Следящее управление и ввод градусных поправок к заданному курсу осуществляются поворотом штурвала, а простое дистанционное управление — путем нажатия специальных клавиш.
В авторулевом предусмотрен автоматический возврат штурвала в нулевое положение при следящем режиме, что облегчает управление судном вручную.
При эксплуатации системы АТР в режимах «следящий» и «простой» рекомендуется запускать оба насоса рулевого привода, что увеличивает скорость перекладки руля и повышает надежность рулевого управления.