Файл: Лекция 34. Принцип действия системы автоматического управления курсом судна. Комплектация, назначение. Принцип действия авторулевого Печора.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 06.12.2023
Просмотров: 175
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
При работе в режиме «Автомат» следует периодически переключать систему с одного насоса на другой для равномерной эксплуатации оборудования.
Подробно устройство системы АТР дано в эксплуатационной документации,
имеющейся на судне.
Автоматический малогабаритный рулевой АРМ-2
предназначен для установки на судах морского флота среднего и малого тоннажа, а также имеющих нестандартное рулевое устройство. Он может работать от курсоуказателей с дистанционной передачей показаний на частоте 50 и 500 гц.
Комплект авторулевого состоит из четырех основных приборов.
Прибор № 1 включает в себя всю механическую схему авторулевого. Он выполняется в двух вариантах: с сельсинами БС-404А (АРМ-2—50) и с сельсинами СС-150 (АРМ-2—600). Устанавливается вместо путевого репитера гирокомпаса в рулевой рубке судна рядом со штатным постом управления рулем.
В приборе № 2 размещена схема формирования сигналов управления, необходимые устройства для настройки авторулевого, а также звуковая и световая сигнализация. Прибор устанавливается на переборке в рулевой рубке.
Прибор № 3 является датчиком сигнала обратной связи, пропорционального углу поворота руля.
Прибор № 4 представляет собой соединительную коробку, служащую для подключения прибора № 1 к схеме.
Если на судне установлен указатель положения руля типа ПК7/ПС или 845/ПС28, то для упрощения монтажа авторулевого взамен прибора № 3 может быть установлен прибор № 5, который выполняет те же функции, но устанавливается в рулевой рубке.
Авторулевой АРМ-2 может также использоваться на малотоннажных судах со штуртросовым рулевым устройством или с гидравлической системой управления рулевой машиной. В этом случае в комплект авторулевого добавляется специальный исполнительный механизм, состоящий из электродвигателя с редуктором и электромагнитной муфты. Выходной вал исполнительного механизма соединяется со штурвалом цепной передачей и включается автоматически при включении авторулевого.
Питание авторулевого осуществляется от преобразователя гирокомпаса. Электродвигатель исполнительного механизма работает на постоянном токе 110/220 в, потребляемая мощность, порядка 300 вт.
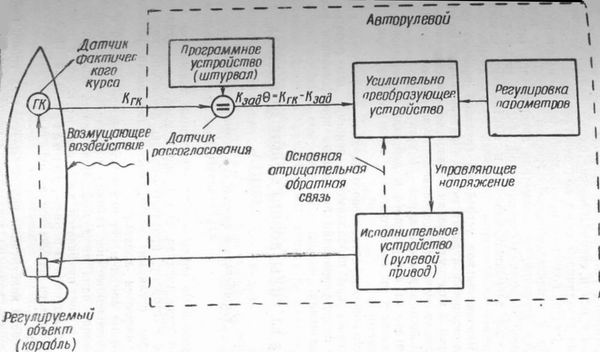
Рис. 1.13. Принципиальная схема авторулевого
АВТОРУЛЕВОЙ «ПЕЧОРА»
Авторулевой «ПЕЧОРА» предназначен для стабилизации движения судна на заданном курсе и для плавного изменения курса судна с заданной угловой скоростью поворота.
Пульт управления.
Пульт управления (ПУ) является основным прибором авторулевого, с которого осуществляются все виды дистанционного управления рулём.
Корпус прибора литой, водозащищенного исполнения.
Все органы управления, шкалы, расположены на двух откидных крышках и на лицевой стороне прибора.
На скошенной части верхней крышки расположены:
-- окно для шкалы аксиометра
-- окно для шкалы репитера гирокомпаса
-- гнездо для ключа согласования шкал курса
-- рукоятка переключателя видов управления
-- педали простого управления
-- ручка переключателя коэффициента обратной связи со шкалой на 11 положений
-- ручка потенциометра со шкалой для регулировки сигнала производной угла поворота судна
-- сигнальные лампы с надписями: «Простой», «Следящий», «Автомат», «Авария гирокомпаса»
На лицевой стороне между верхней и средней крышками расположены:
-- рукоятка управления перекладкой руля при видах управления «Следящий», «Циркуляция»
-- ручка переключателя чувствительности авторулевого на два положения «Грубо», «Точно»
-- две ручки потенциометров подсветки шкал и сигнальных ламп
-- ручки устройства для фиксации рукоятки управления
На внешней стороне средней крышки размещены:
-- ручка переключателя запуска рулевых машин
-- ручка переключателя усилителей
-- окно сигнальной лампы запуска рулевых машин
-- ручка переключателя сигнала об уходе судна с курса на 4 положения
-- плата с предохранителями
В нижней части корпуса размещены:
-- блоки коррекции
-- усилители
-- клемные платы
Станция электроэлементов
Станция электроэлементов (СЭ) предназначена для размещения в ней электроэлементов и для удобства разводки кабельных трасс.
Рулевой датчик
Рулевой датчик (РД) предназначен для выработки сигнала обратной связи от истинного положения руля для электрической схемы авторулевого и для рулевых указателей.
Рулевой датчик состоит из корпуса и крышки. В нижней части корпуса выведен валик с рычагом. Рычаг связан с баллером руля.
В рулевом датчике установлены:
-- сельсины-трансформаторы следящей системы
-- сельсин-датчик
-- электрические ограничители
-- клемные платы
Исполнительные механизмы
Исполнительные механизмы (ИМ) входят в комплект авторулевых предназначенных для установки на судах с электрогидравлическими рулевыми машинами.
В авторулевых «Печора» предусмотрены следующие режимы управления:
-- автоматический – удержание судна на заданном курсе
-- циркуляция – изменение курса судна с заданной угловой скоростью
-- следящий – обеспечивающий перекладку руля на угол, пропорциональный углу отклонения рукоятки управления
-- простой
Питание станции обеспечивается от судовой сети 127 или 220 В. 50 Гц.
ПОДГОТОВКА АВТОРУЛЕВОГО К РАБОТЕ
Подготовка авторулевого к работе производится заблаговременно и начинается с :
-- Визуально осмотреть приборы.
-- Убедиться что режим управления установлен в положение «Простой».
-- Согласовать показания шкал репитеров с основным прибором гирокомпаса.
-- Подать питание на авторулевой.
-- Произвести проверку авторулевого во всех режимах
Эксплуатация авторулевого
При работе главных двигателей на задний ход работа авторулевого в режиме «Автомат» ЗАПРЕЩЕНА.
Режим работы «Автомат» используется при длительном плавании прямыми курсами.
В случаях интенсивного маневрирования, в штормовую погоду, движении на малых ходах РЕКОМЕНДУЕТСЯ использовать режим «Следящий».
Режим «Простой» является резервным и используется при выходе из строя отдельных элементов авторулевого.
При плавании в штилевую погоду переключатель чувствительности должен стоять в положении «Точно».
При ухудшении погоды переключатель чувствительности должен быть переведён в положение «Грубо».
Переход с одного режима работы авторулевого на другой может производиться на ходу судна, однако в момент переключения необходимо, чтобы судно находилось на заданном курсе, а руль в диаметральной плоскости.
Переход на новый курс может производиться в режиме управления
«Автомат». Для этого в авторулевом АТР поворотом штурвала подводят подвижный индекс под новое значение курса, и судно выйдет на новый курс.
Для перехода на новый курс возможно использование режима «Циркуляция».
Для этого необходимо рукоятку управления отклонить на некоторый угол и зафиксировать её в отклоненном положении. Чем больше будет отклонена рукоятка, тем быстрее будет поворачиваться судно. Когда нужное новое значение подойдёт под подвижный индекс, следует снять рукоятку с фиксатора.
При следовании судна с использованием авторулевого в автоматическом режиме возможен контроль за точностью удержания на курсе с помощью контактного приспособления, которое по желанию судоводителя подаёт звуковой сигнал при отклонении на угол более 3, 6 или 9 градусов.
Техническое обслуживание авторулевого.
При эксплуатации авторулевого необходимо производить его планово предупредительные осмотры.
Планово предупредительные осмотры подразделяются на:
-- еженедельные
-- ежемесячные
-- полугодовые
Один раз в неделю следует производить наружный осмотр приборов авторулевого и проверять его работу во всех режимах.
После каждого перехода необходимо производить наружный осмотр приборов авторулевого и проверять его работу во всех режимах.
Один раз в месяц, дополнительно к выше перечисленным мероприятиям, производить замер сопротивления изоляции основных линий, согласно инструкции по эксплуатации.
Один раз в пол года, дополнительно к выше перечисленным мероприятиям, проводить проверку герметизации приборов, надежность крепления приборов, узлов, механизмов и монтажа, наличие смазки, состояние кабелей и перемычек заземления.
Контрольные вопросы
1. Предназначение системы автоматического управления курсом судна?
2. Принцип действия системы автоматического управления курсом судна?
3. Комплектация системы автоматического управления курсом судна?