Файл: Отчёт по лабораторной работе 2 Синтез и исследование рекурсивных цифровых фильтров.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 06.12.2023
Просмотров: 30
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
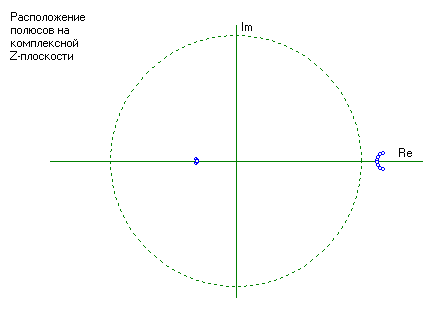
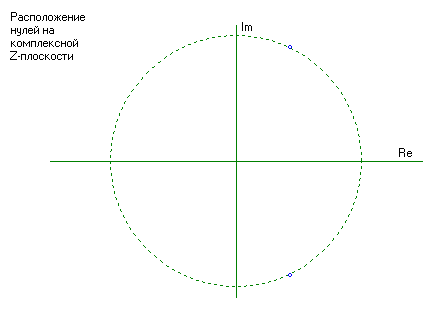
Рисунок 8 - Картина нулей и полюсов на комплексной Z-плоскости
ПЗФ
9. Как преобразуются частоты аналогового и цифрового фильтров при билинейном преобразовании?
H(z) = H(p) при р = f(z); H(р) = H(z) при z = f –1 (p), где р и z – комплексные операторы преобразования Лапласа и Z-преобразования. Путем перехода к частоте с помощью замен р = j(), z = e jTд = e j находятся частотные преобразующие функции = f(), = f –1 (), устанавливающие связь между нормированными частотами аналогового и цифрового = Tд фильтров и их частотными характеристиками: H(j) = H(j) при = f(); H(j) = H(j) при = f –1 ()
Частоты аналогового фильтра нормированы к частоте среза (с = 1), а частота цифрового фильтра нормирована к частоте дискретизации fд: = 2f/fд. Частотная характеристика цифрового фильтра определяется в диапазоне частот (0–fд/2), что соответствует изменению в пределах (0–). При этом частота аналогового фильтра может принимать значения от 0 до , которые при билинейном преобразовании сжимаются в область частот (0– fд/2) (или (0–) – для ) цифрового фильтра

9. Чему равно требуемое число операций умножения на один отсчет сигнала при канонической форме его реализации?