ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 12.12.2023
Просмотров: 16
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Қазақстан Республикасының Білім және ғылым министрлігі
Л.Н.Гумилев атындағы Еуразия ұлттық университеті
№10 Зертханалық жұмыс
Пәні: Басқару теориясының әдістері
Тақырыбы: Интеллектуалды басқару жүйесі, басқарудың интеллектуалды
модельдері.
Мамандығы: M100 – Автоматтандыру және басқару
Орындаған: Іңірбаева Ә.Н., Матжан Ж.К.,Кеңесхан Рамазан
Тобы: МАУ - 11
Қабылдаған: Оразбаев Б.Б.
(ғылыми дәрежесі, атағы, Т.А.Ж.)
_____________ ______________ «____» __________________2023ж.
(бағасы) (қолы)
Астана, 2023
Тұрақты тұрақты қозғалтқыш контроллері нейроадаптивті анық емес басқару логикасы
Кіріспе
Тұрақты ток қозғалтқыштары көптеген өнеркәсіпте кеңінен қолданылады арқасында электрлік көліктер мен роботтық қарулар сияқты қолданбалар дәл, қарапайым және үздіксіз бақылау сипаттамалары. Дәстүр бойынша төмен қуатты тұрақты ток қозғалтқыштарының жылдамдығын реттеу кеңінен қолданылады ағымдағы бақылау әдісі [1]. Қажетті момент сипаттамалары мүмкін пропорционалды-интегралдық (PI) және пропорционалды-интегралдық (PI) контроллерлер арқылы қол жеткізуге болады.интегралдық-дифференциалдық (PID) түрлері. PI және PID контроллерлері осындай сияқты артықшылықтар: жақсы жауап, қарапайым құрылым және ақылға қонымды сенімділік, бірақ олардың кемшіліктері бар, мысалы: PI күшейтуінің оңтайлы параметрі және PID өте күрделі. Бүгінгі таңда контроллердің бірнеше түрі бар, әртүрлі тапсырмаларды орындау кезінде DPT жылдамдығын басқаруға арналған. Үшін қарапайым басқару және жеткілікті жоғары өнімділік DPT болуы мүмкін пайдаланылған: анық емес логикалық контроллер, нейро-бұлыңғырлықтың адаптивті жүйесі логика (ASNL), анық емес генетикалық алгоритм, анық емес үйір және т.б. ASNL контроллерін 90-шы жылдардың басында Джанг ұсынған. Біріктіру анық емес логика және нейрондық желі ұғымдары, бұл гибридті интеллектуалды жүйе,бұл автоматты түрде жақсырақ үйренуге және бейімделуге мүмкіндік береді. Нейро-бейімделген оқыту әдістері анық емес модельдеу процедурасы болып табылады деректер жинағын зерттейді және мүшелік функциясының параметрлерін автоматты түрде есептейді,сәйкес анық емес логикалық жүйеге ең жақсы мүмкіндік береді берілген кіріс/шығыс деректерін қадағалайды және сапаны бақылауды анықтайды [2].
Бұл жұмыстың мақсаты – ASNL негізіндегі контроллерді әзірлеу
жүктемемен АКДС жылдамдығын тиімді басқару. Жұмыста шешімін табады келесі тапсырмалар: тұрақты ток қозғалтқышының моделі зерттелді, ASNL-контроллер, таңдалған контроллердің математикалық модельдері ортада жүзеге асырыладыMATLAB-Simulink және реттеу уақыты бойынша салыстырмалы талдау жасады,уақытты көтеру және жүктеу үшін асып кету. Басқару схемасын модельдеу
Контроллер негізіндегі DPT MATLAB-Simulink ортасында жүргізілді.
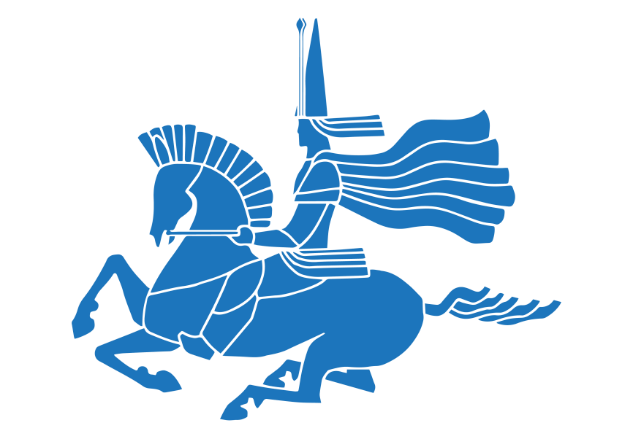
Тұрақты ток қозғалтқышының моделі
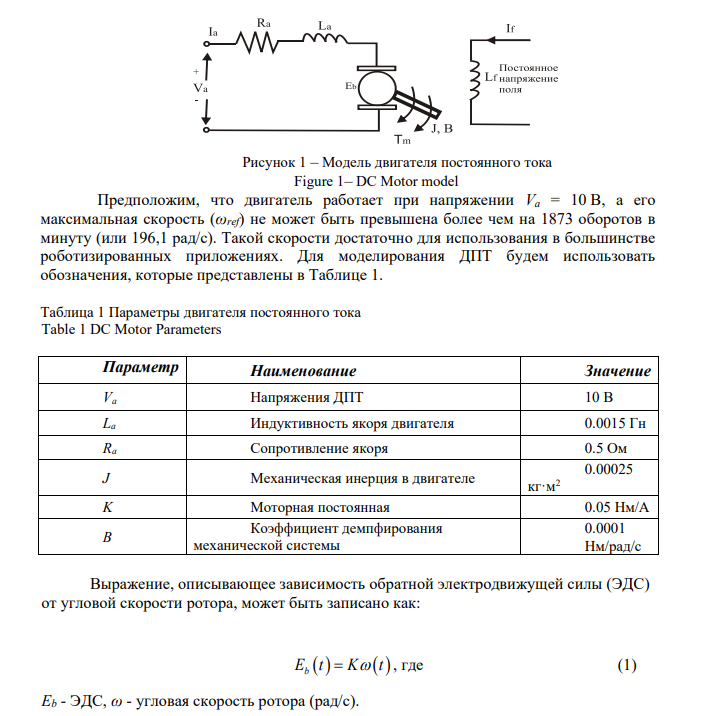
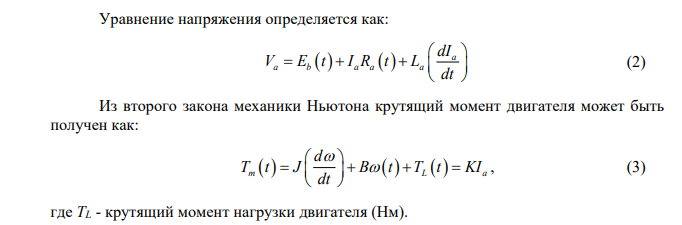
Адаптивный Нейро-Нечеткий Контроллер