Файл: Расчёт авиационного реверсивного электрического двигателя с последовательным возбуждением.docx
Добавлен: 09.01.2024
Просмотров: 72
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Кирсановский авиационный технический колледж –
филиал МГТУ ГА.
КУРСОВАЯ РАБОТА
по дисциплине
«Электрифицированное оборудование воздушного судна»
Специальность 25.02.03
«Техническая эксплуатация электрифицированных и
пилотажно-навигационных комплексов»
_____________ * * * _____________
Тема: «Расчёт авиационного реверсивного электрического двигателя с последовательным возбуждением».
Разработал ________ /Кайзер Д.И./
(подпись) (Фамилия И.О.)
Группа: «50»
Руководитель __________ /Махмудов Р.Ф. /
(подпись) (Фамилия И.О.)
г. Кирсанов
2021 год
Оглавление
Введение 3
Раздел 1. Коллекторные машины 4
1.1 Основные сведения 4
1.2 Пуск двигателя 6
1.3 Двигатель последовательного возбуждения 7
Раздел 2. Расчёт авиационного реверсивного электрического двигателя с последовательным возбуждением 10
2.1 Выбор основных размеров 10
2.2 Расчёт обмотки якоря 14
2.3 Размеры магнитопровода 16
2.4 Расчёт последовательной обмотки возбуждения 17
2.5 Коллектор и щётки 18
Заключение 19
Используемая литература. 20
Введение
Гражданская авиация в России и за рубежом развивается по одним законам. Оборудование воздушных судов совершенствуется в соответствии с общими мировыми тенденциями и с требованиями ИКАО. Пассажирские самолёты имеют ряд специфических особенностей. К ним относятся повышенная надёжность оборудования, малая продолжительность стоянок между рейсами (15ч 30 мин.) высокий коэффициент использования (до 18 часов в сутки), и большой срок службы между капитальными ремонтами (4000ч - 5000 ч.). Повышение надёжности оборудования, повышает безаварийность.
В результате модернизации оборудования изменяются требования и к системам электроснабжения, например (особенностью является создание комфорта для пассажиров, для чего устанавливаются системы кондиционирования, комфортного освещения, телевизоры).
Следовательно, возрастает мощность системы электроснабжения.
Установка точных пилотажно-навигационных комплексов повышает требования к стабильности работы систем электроснабжения, т.е. системы электроснабжения являются комплексом неразрывно связанным с основными характеристиками самолёта, например (Применение на самолёте мощных потребителей требует установки трехфазной системы переменного тока и повышенного трёхфазного напряжения U = 200/115 В, f = 400 Гц., что по сравнению с низковольтной системой постоянного напряжения, вес меди проводов уменьшает в 18 раз, а вес трёхфазных агрегатов на ? меньше однофазных).
В данном курсовом проекте рассмотрим все особенности и характеристики коллекторного электродвигателя с последовательным возбуждением, а также на основании исходных данных определим его основные размеры и произведём расчёт обмотки, пазов якоря и обмотки возбуждения.
Раздел 1. Коллекторные машины
1.1 Основные сведения
Основным видом машины постоянного тока является коллекторная. Принцип ее работы излагается на примере генератора в его простейшем исполнении (рис 1, а). Внутри неподвижной магнитной системы чередующейся полярности помещен виток, стороны которого при вращении описывают окружность. Магнитное поле предполагается равномерным. При вращении витка с неизменной скоростью в его сторонах аб и cd индуктируется синусоидальная э. д. с. , аналогично тому, как это было при вращении магнитного поля относительно витка, когда рассматривалось образование э. д. с. в синхронном генераторе.
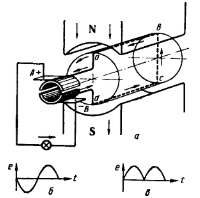
Рис 1. Простейшая модель генератора постоянного тока.
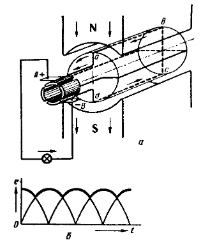
Рис 2. Модель машины постоянного тока с двумя витками на якоре.
Выпрямление переменной э. д. с. витка в э. д. с. постоянного знака на зажимах машины происходит при помощи устройства, называемого коллектором, который в простейшем виде в рассматриваемом примере представляет собой два полукольца, изолированных друг от друга, к которым присоединены концы витка. На эти полукольца, вращающиеся вместе с присоединенной к ним стороной витка, наложены неподвижные щетки.
Для выяснения принципа выпрямления проследим процесс образования э. д. с. в витке и возникновения разности потенциалов между полукольцами, которые назовем коллекторными пластинами.
Согласно правилу правой руки, в положении витка, изображенном на рисунке 1, а, в верхней его стороне ab э. д. с. направлена «к нам», в нижней cd — «от нас». Если к щеткам подключить внешнюю цепь, то в ней будет протекать ток от щетки А к щетке В. Следовательно, щетка А будет положительной ( +), щетка В — отрицательной (—).
Когда в процессе движения стороны витка аб и cd расположатся на нейтральной линии, э. д. с. витка пройдет через нулевое значение. Миновав нейтральную линию, каждая из сторон витка окажется в магнитном поле другого знака, и э. д. с. в витке изменит направление.
Но именно в тот момент, когда виток своими сторонами переходит в зону действия поля другого знака, связанные с его концами коллекторные пластины покидают щетки, с которыми они соприкасались до подхода к нейтральной линии, и начинают соприкасаться каждая е другой щеткой. Следовательно, знак э.д.с. на щетках не изменяется, так как каждая из них касается коллекторной пластины, когда соединенная с пластиной сторона витка находится в сфере действия полюса определенной полярности. Кривая э.д.с. на щетках изображена на рисунке 1, в, полярность щеток не меняется, и, следовательно, ток во внешней цепи остается по направлению постоянным.
Чтобы усовершенствовать рассмотренную принципиальную схему, то есть увеличить значение и уменьшить пульсацию э.д.с., заменяют виток катушкой, смещая катушки относительно друг друга в пространстве. На рисунке 2, а, показан генератор с двумя витками, сдвинутыми в пространстве на 90°; каждый из витков присоединен к своей паре коллекторных пластин. Электродвижущие силы витков соответственно сместятся во времени, и пульсация э.д.с. на щетках генератора заметно уменьшится (сплошная линия по верхушкам кривых на рис 2, б). Увеличивая число витков (катушек) и соответственно число коллекторных пластин, можно уменьшить пульсацию до незначительной величины.
1.2 Пуск двигателя
Перед пуском двигателя необходимо рычаг Р реостата поставить на холостой контакт. Затем включают рубильник, переводят рычаг на первый промежуточный контакт 1 и цепь якоря двигателя оказывается подключенной к сети через наибольшее сопротивление реостата
Одновременно через рычаг Р и шину Ш к сети подключается обмотка возбуждения, ток в которой в течение всего периода пуска не зависит от положения рычага Р, так как сопротивление шины по сравнению с сопротивлением обмотки возбуждения пренебрежимо мало.
С появлением тока в цепи якоря
 возникает пусковой момент
возникает пусковой момент 
, под действием которого начинается вращение якоря. По мере нарастания частоты вращения увеличивается противо-ЭДС
 =
= , что ведет к уменьшению пускового тока и пускового момента.
, что ведет к уменьшению пускового тока и пускового момента.По мере разгона якоря двигателя рычаг пускового реостата переключают в положения 2, 3 и т. д. В положении 5 рычага реостата пуск двигателя заканчивается (=0). Сопротивление пускового реостата выбирают обычно таким, чтобы наибольший пусковой ток превышал номинальный не более чем в 2--3 раза.
Для пуска двигателей большей мощности применять пусковые реостаты нецелесообразно, так как это вызвало бы значительные потери энергии. Кроме того, пусковые реостаты были бы громоздкими. Поэтому в двигателях большой мощности применяют безреостатный пуск двигателя путем понижения напряжения. Примерами этого являются пуск тяговых двигателей электровоза переключением их с последовательного соединения при пуске на параллельное при нормальной работе или пуск двигателя в схеме «генератор - двигатель».
1.3 Двигатель последовательного возбуждения
У двигателя с последовательным возбуждением ток якоря является и током возбуждения I= IЯ= IВ, так как обмотка возбуждения его соединена последовательно с якорем . Магнитный поток двигателя меняется пропорционально току якоря, пока сердечник не достигнет магнитного насыщения. Пусковой реостат после окончания пуска полностью выводится.
В этом двигателе обмотка возбуждения включена последовательно в цепь якоря, поэтому магнитный поток Ф в нем зависит от тока нагрузки. При небольших нагрузках магнитная система машины не насыщена и зависимость магнитного потока от тока нагрузки прямо пропорциональна.
При уменьшении нагрузки двигателя последовательного возбуждения частота вращения резко увеличивается и при нагрузке меньше 25 % от номинальной может достигнуть опасных для двигателя значений («разнос»). Поэтому работа двигателя последовательного возбуждения или его пуск при нагрузке на валу меньше 25 % от номинальной недопустима.
Для более надежной работы вал двигателя последовательного возбуждения должен быть жестко соединен с рабочим механизмом посредством муфты и зубчатой передачи. Применение ременной передачи недопустимо
, так как при обрыве или сбросе ремня может произойти «разнос» двигателя. Учитывая возможность работы двигателя на повышенных частотах вращения, двигатели последовательного возбуждения, согласно ГОСТу, подвергают испытанию в течение 2 мин на превышение частоты вращения на 20 % сверх максимальной, указанной на заводском щите, но не меньше чем на 50 % сверх номинальной.
Частоту вращения двигателей последовательного возбуждения можно регулировать изменением либо напряжения U, либо магнитного потока обмотки возбуждения. В первом случае в цепь якоря последовательно включают регулировочный реостат Rрг. С увеличением сопротивления этого реостата уменьшаются напряжение на входе двигателя и частота его вращения. Этот метод регулирования применяют главным образом в двигателях небольшой мощности. В случае значительной мощности двигателя этот способ неэкономичен из-за больших потерь энергии в Rpr. Кроме того, реостат Rpr, рассчитываемый на рабочий ток двигателя, получается громоздким и дорогостоящим.
При совместной работе нескольких однотипных двигателей частоту вращения регулируют изменением схемы их включения относительно друг друга. Так, при параллельном включении двигателей каждый из них оказывается под полным напряжением сети, а при последовательном включении двух двигателей на каждый двигатель приходится половина напряжения сети. При одновременной работе большего числа двигателей возможно большее количество вариантов включения. Этот способ регулирования частоты вращения применяют в электровозах, где установлено несколько одинаковых тяговых двигателей.
Изменение подводимого к двигателю напряжения возможно также при питании двигателя от источника постоянного тока с регулируемым напряжением. При уменьшении подводимого к двигателю напряжения его механические характеристики смещаются вниз, практически не меняя своей кривизны.
Регулировать частоту вращения двигателя изменением магнитного потока можно тремя способами: шунтированием обмотки возбуждения реостатом Rpr , секционированием обмотки возбуждения и шунтированием обмотки якоря реостатом.
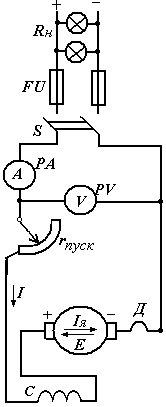
Рис 3. Схема двигателя постоянного тока с последовательным возбуждением