ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 09.01.2024
Просмотров: 85
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Ширина зазора: 2, 3,5 , 5, 10, 15, 30 мм
Индуктивные датчики кольцевого типа RC10, RC15
Эти датчики выполнены в форме кольца, внутри которого сконцентрировано переменное электромагнитное поле. Датчик срабатывает тогда, когда металлический объект проходит сквозь кольцо.

Внутренний диаметр кольца: 10, 15, 21, 43 мм
Ультразвуковые датчики положения
Ультразвуковые преобразователи позволяют излучать и принимать ультразвуковые волны целого ряда частот. Они представляют собой специальные пьезоэлектрические устройства, имеющие резонансную частоту в диапазоне ультразвука. Подача на излучающий преобразователь колебаний от генератора на некоторой резонансной частоте вызывает излучение ультразвуковых волн.
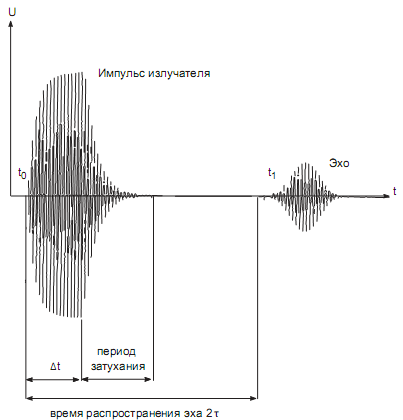
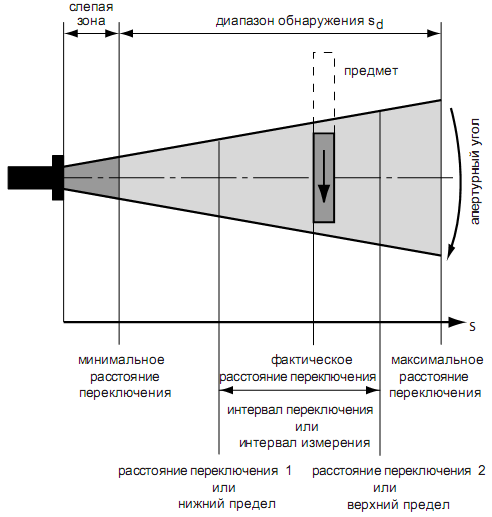
Преобразователь посылает пакет звуковых импульсов и преобразовывает импульс эха в напряжение. Интегрируемый контроллер вычисляет расстояние по времени эха и скорости звука. Длительность излучаемого импульса Δt и время затухания звукового преобразователя являются причиной для формирования слепой зоны, в которой ультразвуковой датчик не может обнаружить предмет. Ультразвуковая частота находится между 65 кГц и 400 кГц, в зависимости от типа датчика; частота следования импульсов между 14 гц и 140 гц.
Активный диапазон ультразвукового датчика обозначается как диапазон обнаружения sd. Диапазон обнаружения - расстояние, в пределах которого ультразвуковой датчик обнаруживает объект. Номер модели определяет максимальный диапазон обнаружения датчика. Ультразвуковой датчик обнаруживает предметы в пределах его диапазона обнаружения, независимо от того, приближаются ли эти предметы к чувствительному элементу в осевом направлении или двигаются через звуковой конус в поперечном направлении.
Достоинства индуктивных датчиков положения: большое расстояние срабатывания (до 10 м), устойчивая работа в загрязненных производственных условиях. Ультразвуковые датчики предоставляют идеальное решение для бесконтактного определения местоположения объектов (эхолокация) и расстояний во всевозможных промышленных областях, где такие факторы, как пыль, дым или пар, могут воздействовать на датчики. Объекты, состоящие из различных материалов, могут быть обнаружены,
невзирая на цвет или форму, с точностью до миллиметров.
Недостатки: высокая стоимость, наличие «слепой зоны».
2.4 Датчики углового и линейного перемещения
Датчики угла поворота
Датчик угла. Представляет собой преобразователь угловой координаты в электрическое напряжение. Часто их используют для измерения угла поворота исполнительного вала.
Датчик углового рассогласования. Преобразует разность углов, например, заданного и фактического углов поворота исполнительного вала в эл. напряжение. В качестве датчиков угла и рассогласования широко применяются аналоговые элементы – сельсины и вращающиеся трансформаторы.
Недостатком аналоговых датчиков является невысокая точность и ограниченный диапазон изменения угла.
Цифровые датчики угла обеспечивают измерение углов в больших диапазонах и с высокой точностью. Их выходной величиной является число N обычно в двоичной системе счисления, представленное с помощью дискретных электрических сигналов. Требуемая точность достигается числом разрядов датчика.
Различают абсолютные и относительные датчики угла.
Относительные (или инкрементные) датчики измеряют приращение угла поворота вала относительно нулевого положения. Конструкция состоит из кодового диска и считывающего устройства, обычно оптопары.
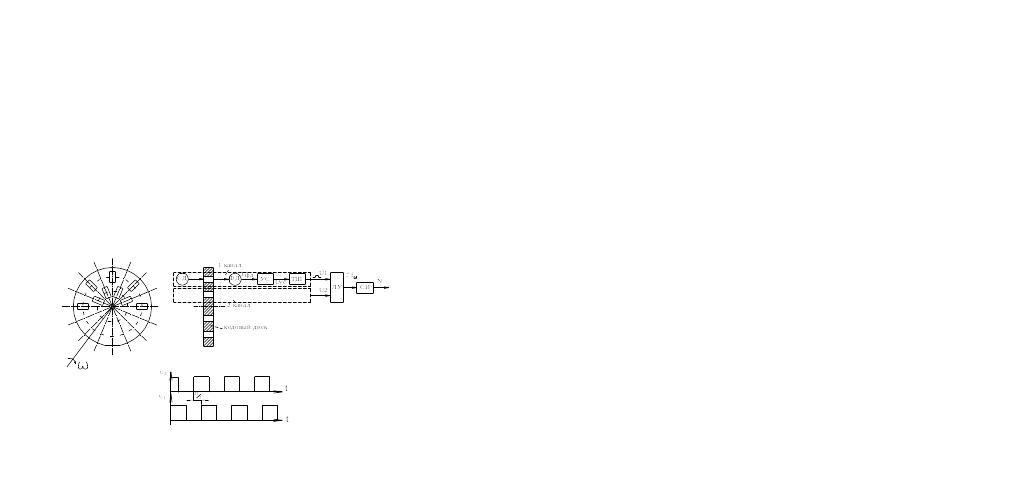
Наиболее широкое применение получили датчики с фотоэлектрическим импульсным преобразователем. Преобразователь датчика вырабатывает 2 серии импульсов, сдвинутые по фазе на π/2, что необходимо для определения знака угла поворота. На двух дорожках кодового диска расположены пропускающие свет щели. В каждом канале свет от светодиода СД через щель попадает на фотодиод ФД, который открывается и появляется ток JФД. Он усиливается усилителем УС. Триггеры Шмитта ТШ формируют на выходе прямоугольные импульсы U1 и U2 с постоянной амплитудой, сдвинутые по фазе на π/2.
Выделение импульсов из каналов преобразователя для положительного fω или отрицательного f –ω направления скорости осуществляется логическим узлом ЛУ.
Счетчик СИ, получая сигналы fω (f – ω) от ЛУ, считает число импульсов N. Угол поворота α = α
0 N,
где α0 – угол между соседними щелями одной дорожки.
Достоинства инкрементных датчиков: простая и дешевая конструкция, измерение углов в неограниченном диапазоне, высокая точность.
Недостатки: зависимость показаний от напряжения питания, при исчезновении последнего они сбрасываются.
Абсолютные ЦДУ в общем случае состоят из кодирующего элемента КЭ (диск, барабан) и считывающего устройства СУ на электронных элементах. На диск наносится кодовая маска (рисунок), которая представляет собой определенным образом расположенные на нем токопроводящие и непроводящие участки. Считывающее устройство содержит контактные щетки.
Кодовый диск состоит из трех концентрических колец, кольцо с минимальным радиусом имеет 2 участка, относится к старшему разряду выходного числа, кольцо с максимальным радиусом имеет 2n участков, где n – разрядность схемы считывания (у нас 3). В каждом последующем от центра кольце число участков удваивается, что соответствует в двоичном коде переходу от одного разряда к другому. Напряжение подводится через внешнее кольцо. Если щетки на токопроводящем участке, то – «1», если нет, то «0».
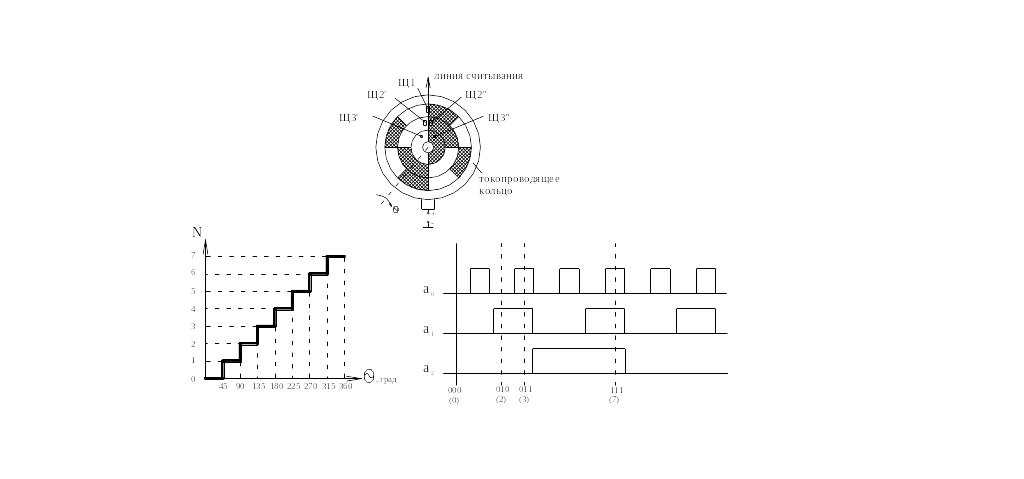
На границе смены участков из-за конечной ширины щеток и неточной их установки по одной прямой появляется неоднозначность считывания. Для её устранения применяют для каждого разряда, кроме младшего, две щетки, симметрично сдвинутые относительно линии считывания. Выбор щетки для считывания (i +1) разряда выполняет логическая схема в зависимости от значения i – го разряда. Со второй дорожки (i =1) считывание осуществляется от щетки Щ2 при а0 = 0 и от Щ2” – при а0 = 1. Для большей точности обычно используется код Грея.
Любому углу поворота диска соответствует комбинация из «0» и «1» на выходе датчика. Для трехразрядного датчика код числа имеет структуру а2 а1 а0, изменяется от значения 000 до 111, что в десятичной системе соответствует числам от 0 до 7.
Шаг измерения равен ΔΘ = 360/2n.
В пределах ΔΘ датчик не реагирует на изменение входной величины Θ. Характеристика имеет ступенчатый вид. Абсолютная погрешность, вызванная дискретностью измерения равна δ = ΔΘ/2.
Достоинства_абсолютных_датчиков'>Достоинства абсолютных датчиков
: независимость показаний от напряжения питания, направление поворота определяется надежнее.
Недостатки: более сложная и дорогая конструкция, измерение углов в диапазоне до 360 0.
Датчики линейного перемещения
Основной принцип: зависимость выходного сигнала от линейного перемещения.
Датчики на основе датчика угла
Одно из наиболее распространённых применений, использующих датчики угла, предполагает установку мерных колёс на вал для получения возможности измерения линейных перемещений. Радиус колеса, как правило, подбирается таким образом, чтобы перемещение за один оборот колеса составляло 100, 200, 400 мм. Используют в основном инкрементные датчики угла.

Перемещение равно L = α R , где R – радиус колеса, α – угол поворота в радианах.
Достоинства: Компактная конструкция, практически неограниченный диапазон измерения расстояний, возможность изменения передаточного отношения.
Недостатки:
Необходим физический контакт колеса датчика и объекта измерения.
Ограниченное применение (необходима гладкая ровная поверхность).
Невысокая точность (около 0,2 мм). Причин несколько:
1. Тепловое расширение колеса при колебаниях температуры.
2. Износ колеса при эксплуатации.
3. Проскальзывание колеса по перемещаемой поверхности. Для предотвращения этого используют алюминиевую накатку либо покрытие из мягкой бугорчатой резины, пластика или уретана. Резина, как правило, обеспечивает хорошее сцепление, но она недолговечна. Пластик прочнее резины и в большинстве случаев служит дольше, но более твёрдая поверхность колеса проскальзывает больше. Накатка колеса может повреждать перемещаемый материал.
4. Ограниченная скорость перемещения. Оптимальная скорость составляет от 3600 до 4000 об/мин. При повышенных скоростях уменьшается точность измерения, так как из-за быстрого перемещения колеса усиливаются воздействия на него различных дестабилизирующих факторов.
Датчики на основе магнитной ленты
При использовании таких датчиков на направляющую часть механизма наклеивается специальная магнитная лента с самоклеящимся слоем, содержащая участки с разными магнитными свойствами, а на ответную часть крепится считывающая магнитная головка.
При взаимном перемещении головки и ленты на выходе датчика возникает серия прямоугольных импульсов, количество которых пропорционально перемещению.

Достоинства: безконтактный способ измерения (зазор между датчиком и линейкой до 2 мм), большой диапазон измерения (до 90 м), высокая точность (разрешение до 0,005 мм), высокая допустимая скорость (до 16 м/с).
Недостатки: высокая стоимость, сложность монтажа, ограниченное применение.
Тросовые датчики
В основе датчика лежит «рулеточный механизм».

Датчик состоит из барабана, на который наматывается стальной трос, возвратной пружины и аналогового или цифрового датчика угла поворота. Корпус датчика закрепляется неподвижно, а трос крепится на перемещаемой детали с помощью серьги.
Достоинства: относительно малые габариты, большое измеряемое перемещение (до 50 м), хорошая точность (до 0,1 мм).
Недостатки: необходимость точной установки (чтобы не перегибался и не перетирался трос), ограниченное применение.
Емкостные датчики
Емкостные датчики по конструкции схожи с датчиками положения. Изменение емкости конденсатора происходит при перемещении диэлектрика или проводника вблизи его обкладок.
Достоинства: бесконтактность работы, компактная конструкция, высокая точность и линейность характеристики, высокая частота измерения
Недостатки: малый диапазон измерения (до 20 мм), влияние внешних магнитных полей.
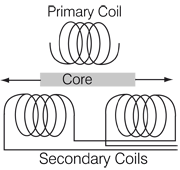
Индуктивные датчики
Метод измерения перемещения основан на изменении магнитного поля при взаимном перемещении магнитных и электромагнитных частей датчика.

Достоинства: бесконтактность работы, усточивость при работе в загрязненной атмосфере, высокая точность (0,05 % от диапазона измерения), большой диапазон измерения (до 630 мм).
Недостатки: значительные размеры (не меньше, чем диапазон измерения), влияние внешних магнитных полей.