ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.02.2024
Просмотров: 79
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
2. Разработка системы автоматического управления
2.1. Описание объекта управления и оценка его динамических характеристик
Объект управления (ОУ) представляет собой электромеханическую систему, состоящую из электродвигателя (ЭД) постоянного тока независимого возбуждения, силового пpеобpазователя (СП) напряжения и механизма с жесткой безpедуктоpной связью между электродвигателем и рабочим органом (РО). Предполагается наличие измерителей (датчиков) напряжения (ИН), тока (ИТ) и скорости (ИС), последний из которых содержит фильтрующий элемент (Ф) 1-го порядка. Функциональная схема объекта управления представлена на рис. 2.1.

Рис. 2.1. Функциональная схема объекта управления
Исходные данные объекта управления.
1. Максимальная угловая скорость ЭД: Ωм = 314 150 рад/с.
2. Максимальный момент нагрузки: Mc = 8.39 8.8 Н∙м.
3. Суммарный момент инерции механической части (ЭД и РО): J = 0.1 0.08 кг∙м2.
4. Номинальное напряжение ЭД: Uн = 220 В.
5. Активное сопротивление якорной цепи: Ra = 0.81 4.66 Ом.
6. Индуктивность якорной цепи: La = 0.015 0.046 Гн.
7. Конструктивная постоянная ЭД: C = 0.67 1.21 Вб.
8. Номинальный ток ЭД: Iн = 13 А.
9. Максимальный ток ЭД: Iм = 3∙Iн.
10. Постоянная времени СП: Tсп = 0.0033 c при P > 2 3 кВт
11. Коэффициенты передачи
а). датчика напряжения: Kдн = 0.05;
б). датчика тока: Kдт = 0.5 В/А;
в). датчика скорости: Kдс = 0.05 В∙с.
12. Постоянная времени фильтра ИС: Tф = 0.001 с.
Технические требования к системе автоматического управления (САУ).
1. Максимально допустимая статическая ошибка стабилизации скорости: Δм = 0.5%(Ω = Ωм).
2. Полоса пропускания:
30 Гц для ЭМС с тиpистоpными 3-фазными СП (P > 2 кВт);
3. Время восстановления скорости при ступенчатом изменении момента нагрузки от нулевого до максимального значения (время возврата скорости к значению, равному 3∙Δм): Tв ≤ 1с.
4. Пеpеpегулиpование скорости: σ ≤ 20%.
2.1.1. Математическое описание ОУ в соотношениях «входа-выхода» (передаточных функциях)
Для того чтобы исследовать автоматическую систему управления (АСУ), необходимо располагать её математическим описанием, характеризующим зависимости координат системы от внешних воздействий и друг от друга.
Наиболее распространёнными способами математического описания, используемыми при проектировании и исследовании АСУ, являются дифференциальные уравнения, структурные схемы, представляющие графическую интерпретацию дифференциальных уравнений, векторно-матричное описание.
Исходные дифференциальные уравнения объекта управления:


 или
или 
где U – номинальное напряжение двигателя,
Ia – номинальный ток двигателя,
Ra – активное сопротивление якорной цепи,
La – индуктивность якорной цепи,
С - конструктивная постоянная электродвигателя,
Ω – скорость двигателя,
Ma – движущий момент двигателя,
Mc – максимальный момент нагрузки,
J – момент инерции двигателя.
Для удобства построения структурной схемы ОУ дифференциальные уравнения переписываются в следующем виде:
Силовой преобразователь представляется апериодическим звеном 1-го порядка с постоянной времени Tсп и коэффициентом передачи равным:
где U = (0 – Uн) = (0 – 220) В,
Uу = (0 – 10) В.
Следовательно
Структурная схема ОУ приведена на рис. 2.2.
 Рис. 2.2. Структурная схема объекта управления
Рис. 2.2. Структурная схема объекта управленияПередаточная функция ОУ по управляющему воздействию Uу определяется по правилу Мейсона, которое применимо для систем любой сложности, т.к. не требует структурных преобразований и является универсальным:

Передаточная функция ОУ по возмущающему воздействию Mc:

2.1.2. Оценка динамических характеристик ОУ корневыми, частотными и временными методами анализа
Нули (корни числителя) и полюсы (корни знаменателя) передаточных функций ОУ.
Передаточная функция по управляющему воздействию Uу:
Полюсы
Передаточная функция по возмущающему воздействию Mc:
Нули
Полюсы
Корневые показатели качества системы автоматического управления (САУ) приведены ниже.
-
Среднегеометрический корень
где a3 – коэффициент при старшей степени характеристического полинома,
a0 – свободный член характеристического полинома.
-
Степень устойчивости
-
Колебательность
-
Время переходных процессов Tп.
Т.к. ближе к оси мнимых чисел Im находится пара комплексно-сопряжённых корней, то время переходных процессов определяется следующим образом
где δ = 0.05.
-
Величина затухания
Для определения полосы пропускания системы и запасов устойчивости по фазе и по амплитуде строятся логарифмическая амплитудно-частотная характеристика (ЛАЧХ) и логарифмическая фазово-частотная характеристика (ЛФЧХ) (рис. 2.3).
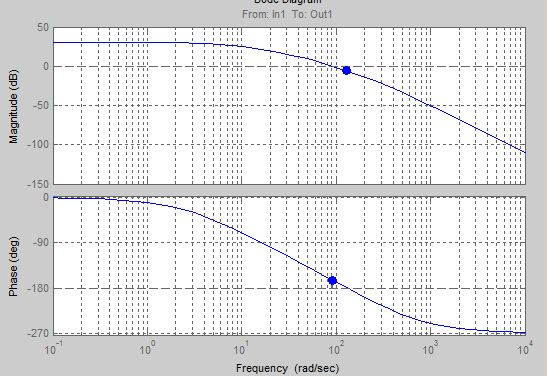
Рис. 2.3. ЛАЧХ и ЛФЧХ ОУ
Ниже приведены частотные показатели качества объекта управления.
-
Частота среза
ωС = 91.2 рад/с.
-
Полоса пропускания
(0 – ωП) = (0 – 91.2) рад/с.
3. Запас устойчивости по амплитуде
ΔA = 5.88 дб на частоте ω = 129 рад/с.
-
Запас устойчивости по фазе
Δφ = 14.8° на частоте ω = 91.2 рад/с.
Также оценка динамических характеристик объекта проводится временными показателями качества. Для этого с помощью программного комплекса MatLab (рис. 2.4) строятся графики переходных процессов по скорости (рис. 2.5) и току (рис. 2.6). При этом на вход системы подаётся управляющее воздействие Uу = 1 В при t = 0 с и в установившемся режиме (в данном случае при t = 7 с) нагрузочный момент сопротивления Mc = 19.6 Н∙м.

Рис. 2.4. Расчетная модель объекта управления
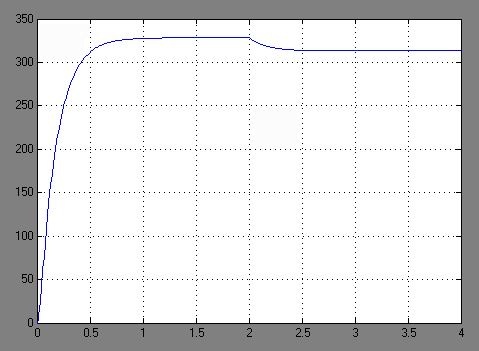
Рис. 2.5. Переходная характеристика ОУ по скорости
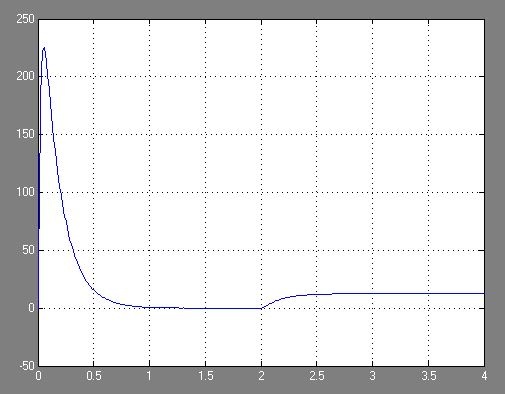
Рис. 2.6. Переходная характеристика ОУ по току
По полученной характеристике ОУ по скорости (рис. 2.5) определяются временные показатели качества, которые должны удовлетворять заданным техническим требованиям к САУ.
-
Время нарастания (время достижения установившегося значения первый раз): Tн = 0.5 с. -
Время достижения первого максимума: Tм = 1.1 с. -
Время регулирования или время переходного процесса (время вхождения в 5%-й коридор от установившегося значения): Tп = 0.5 с. -
Перерегулирование скорости
-
Статическая ошибка стабилизации скорости
6. Время восстановления скорости при ступенчатом изменении момента нагрузки от нулевого до максимального значения (время возврата скорости к значению, равному
Из графика переходного процесса по скорости видно, что статическая ошибка стабилизации скорости практически в 10 раз превышает максимально допустимую:
Анализ статических и динамических характеристик ОУ показывает, что САУ соответствует не всем заданным техническим требованиям. Следовательно, для обеспечения желаемого качества переходных процессов в данной системе необходим синтез регулятора.
-
Синтез последовательного корректирующего устройства (КУ) методом ЛАЧХ. Исследование качества переходных процессов замкнутой САУ
2.2.1. Синтез аналогового варианта последовательного корректирующего устройства
ЛАЧХ исходной системы строится по передаточной функции ОУ:
из характеристического полинома которой определяются сопрягающие частоты системы.
Сопрягающей частоте ω1, ω2, ω3 соответствует наклон -20 дб/дек, т.к. полином 1-го порядка. (рис. 2.7).
Горизонтальный участок ЛАЧХ исходной системы проходит на уровне
ЛАЧХ нескорректированной системы в низкочастотной (НЧ) области строится с таким петлевым усилением, который обеспечивает заданные требования к статической ошибке стабилизации скорости в установившемся режиме.
По заданию статическая ошибка составляет