ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.02.2024
Просмотров: 80
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Рис. 2.14. Расчетная модель объекта управления с корректирующим устройством, задатчиком интенсивности и ограничением по напряжению
С помощью программного комплекса MatLab (рис. 2.14) строятся графики переходных процессов системы по напряжению, току и скорости (рис. 2.15). При этом на вход системы подаётся управляющее воздействие Uу = 10 В при t = 0 с и в установившемся режиме (в данном случае при t = 7 с) нагрузочный момент сопротивления Mc = 19.6 Н∙м.
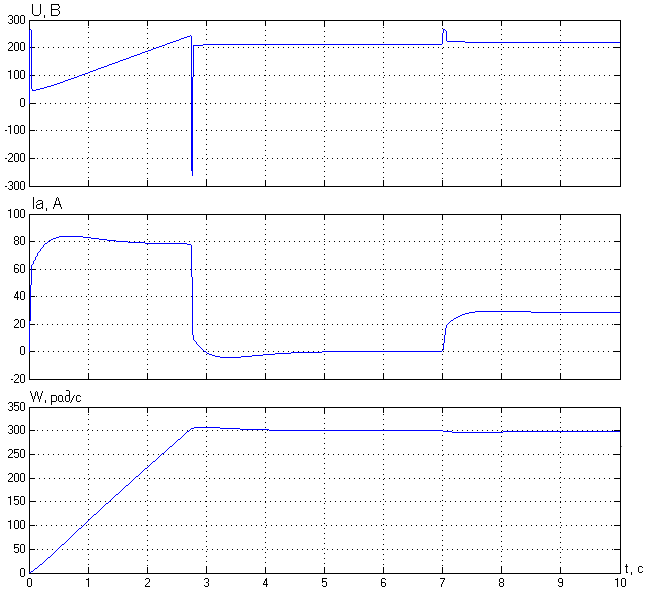
Рис. 2.15. Переходные характеристики по напряжению, току и скорости объекта управления с корректирующим устройством, задатчиком интенсивности и ограничением по напряжению
Из полученных результатов видно, что при работе вне линейной зоны ток не превышает максимально допустимого значения Imax = 84 А, напряжение также находится в области допустимых значений (
Разработанная система управления будет реализована на микроконтроллере.