Файл: Курсовая расчет гидропривода с автономным задатчиком перемещения.pdf
Добавлен: 15.11.2018
Просмотров: 1898
Скачиваний: 28
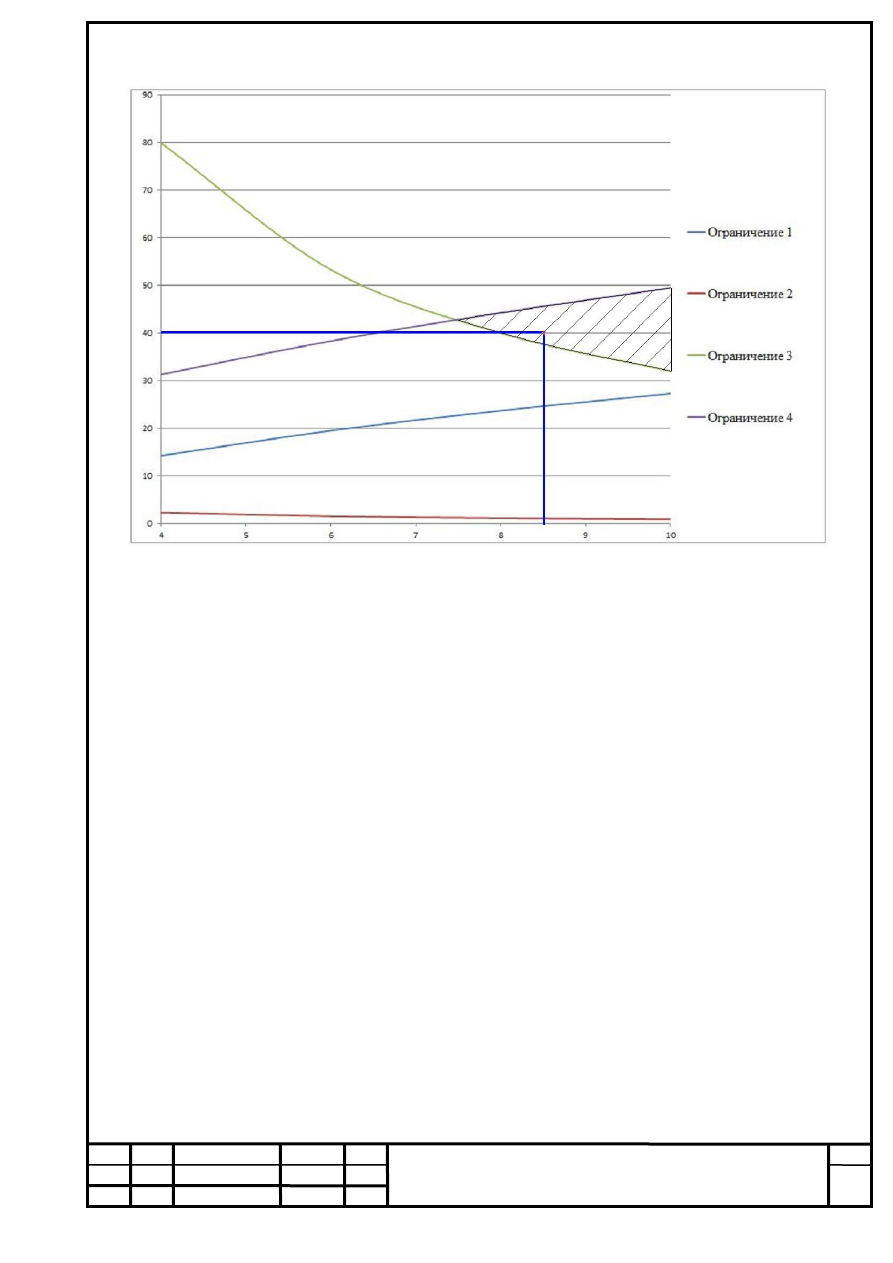
Рисунок 2 – Область допустимых значений
Изм. Лист
№ докум.
Подпись Дата
Лист
12
ВлГУ.220700.8/28.10.4.00.ПЗ
2.2. Структурная схема и определение устойчивости
Передаточная функция замкнутой системы, охваченной обратной связью:
????
з
(????) =
????(????)
????(????)
=
????
д
????/????
ос
????
2
????
3
+ 2????????????
2
+ ???? + ????
,
Расчет коэффициента усиления, постоянной времени, коэффициента
демпфирования.
???? =
2????????
????
????
ос
????
????
???? + 2????
2
=
2 ∙ 50 ∙ 10
−4
∙ 0,75 ∙ 3 ∙ 10
−5
4 ∙ 10
−8
∙ 1,5 ∙ 10
−4
+ 2 ∙ (40 ∙ 10
−4
)
2
= 5,6 ∙ 10
−3
,
???? = √
????????
????(????
????
???? + 2????
2
)
=
= √
550 ∙ 40 ∙ 10
−4
∙ 0,5
1,5 ∙ 10
9
∙ (4 ∙ 10
−8
∙ 1,5 ∙ 10
−4
+ 2 ∙ (40 ∙ 10
−4
)
2
)
= 4,7 ∙ 10
−3
,
???? =
???????? + ????
????
????????
2√????????????(????
????
???? + 2????
2
)
=
=
40 ∙ 10
−4
∙ 1,5 ∙ 10
−4
+ 4 ∙ 10
−8
∙ 1,5 ∙ 10
9
∙ 550
2√1,5 ∙ 10
9
∙ 550 ∙ 40 ∙ 10
−4
∙ 0,5 ∙ (4 ∙ 10
−8
∙ 1,5 ∙ 10
−4
+ 2 ∙ (40 ∙ 10
−4
)
2
)
=
= 0,71,
????
з
(????) =
7,5 ∙ 10
−3
22,09 ∙ 10
−6
????
3
+ 6,67 ∙ 10
−3
∙ ????
2
+ ???? + 5,6 ∙ 10
−3
,
График переходного процесса представлен на рисунке 3.
Время переходного процесса
Время переходного процесса – это время, за которое управляемая величина
начинает отличаться от установившегося значения менее чем за ранее
заданное значение δ, и где δ- точность управления. В рассматриваемом
примере время переходного процесса t
пп
=0,09 с. Что удовлетворяет
заданному качеству переходного процесса.
Изм. Лист
№ докум.
Подпись Дата
Лист
13
ВлГУ.220700.8/28.10.4.00.ПЗ
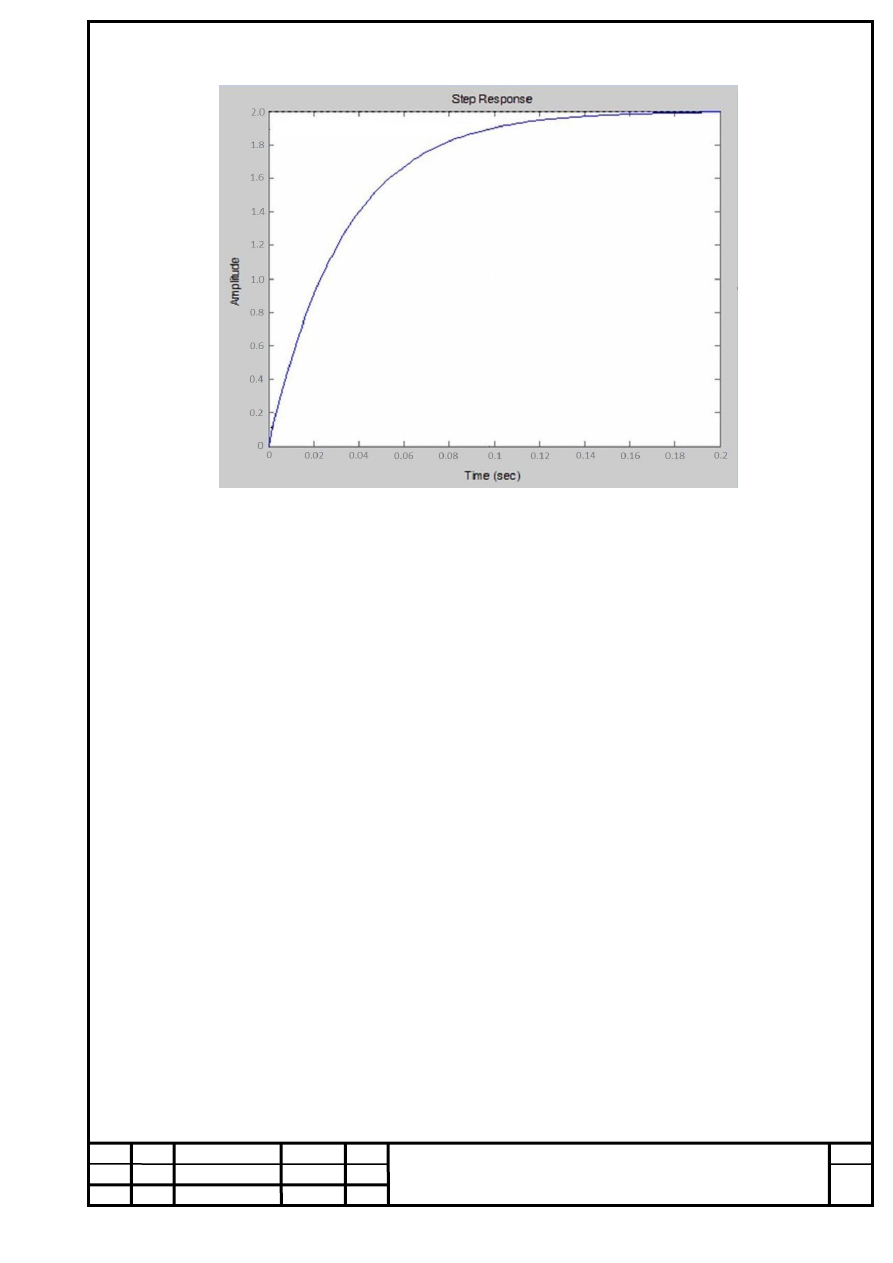
Рисунок 2 – График переходного процесса
Изм. Лист
№ докум.
Подпись Дата
Лист
14
ВлГУ.220700.8/28.10.4.00.ПЗ
3. Разработка схемы расположения приборов ЛЭГП с АЗП
На основании принципиальной схемы ЛЭГП с АЗП (см. рисунок 1),
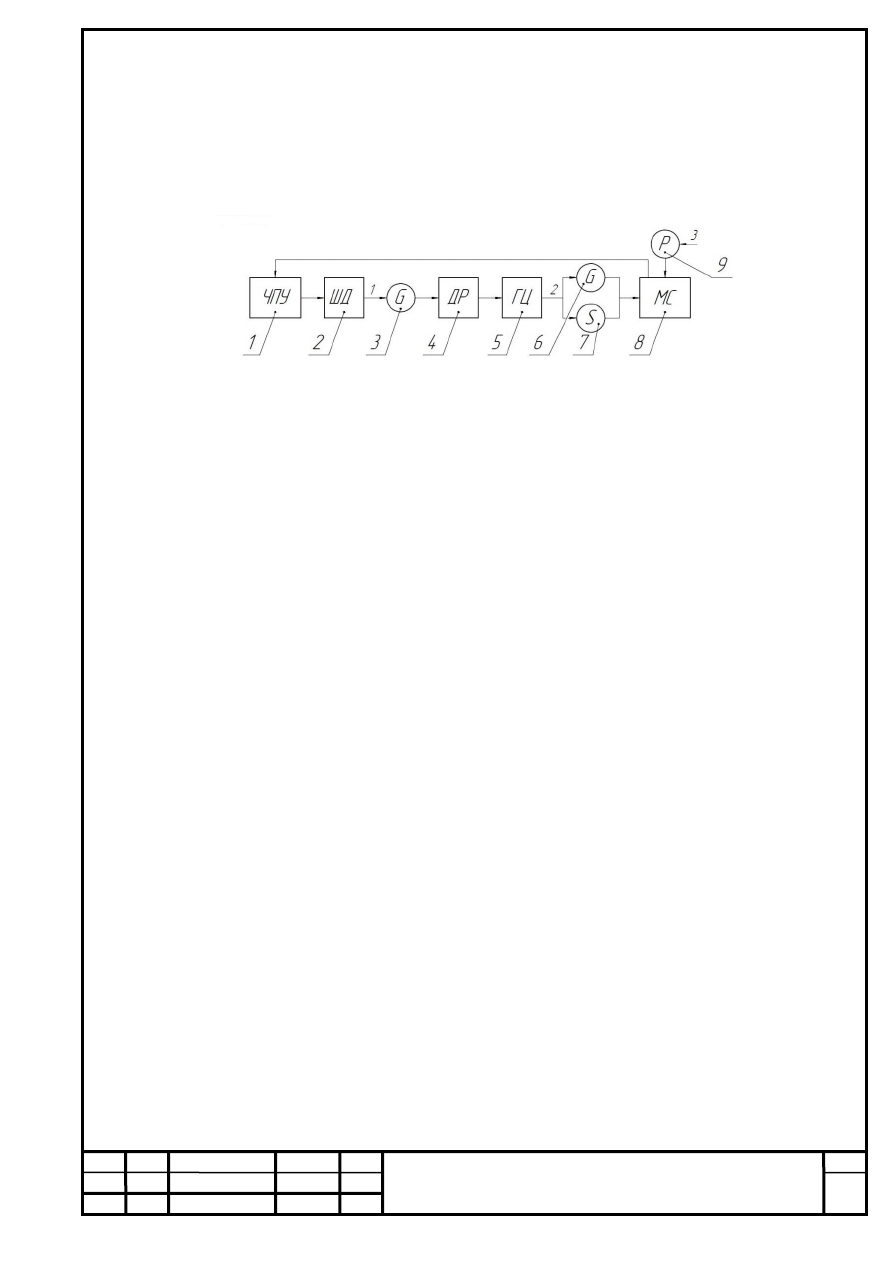
разработаем схему взаимодействия устройств (рисунок 3).
Рисунок 3 – Схема взаимодействия устройств ЛЭГП с АЗП
Описание принципа работы ЛЭГП с АЗП
Входной сигнал от устройства ЧПУ 1, поступает на шаговый двигатель 2,
угловое перемещение, которого контролируется устройством 3, при этом
происходит открытие дроссельного устройства 4 и перемещение
гидроцилиндра и рабочего органа (стола станка), скорость и величина
перемещения контролируются устройствами 6 и 7, а результаты поступают в
устройство сравнения 8. Также контролируется допустимая величина
рабочего давления. Полученные результаты поступают в устройство ЧПУ,
для произведения коррекции и подачи требуемых управляющих сигналов.
Схема автоматизации работы ЛЭГП с АЗП представлена на рисунке 4
Изм. Лист
№ докум.
Подпись Дата
Лист
15
ВлГУ.220700.8/28.10.4.00.ПЗ
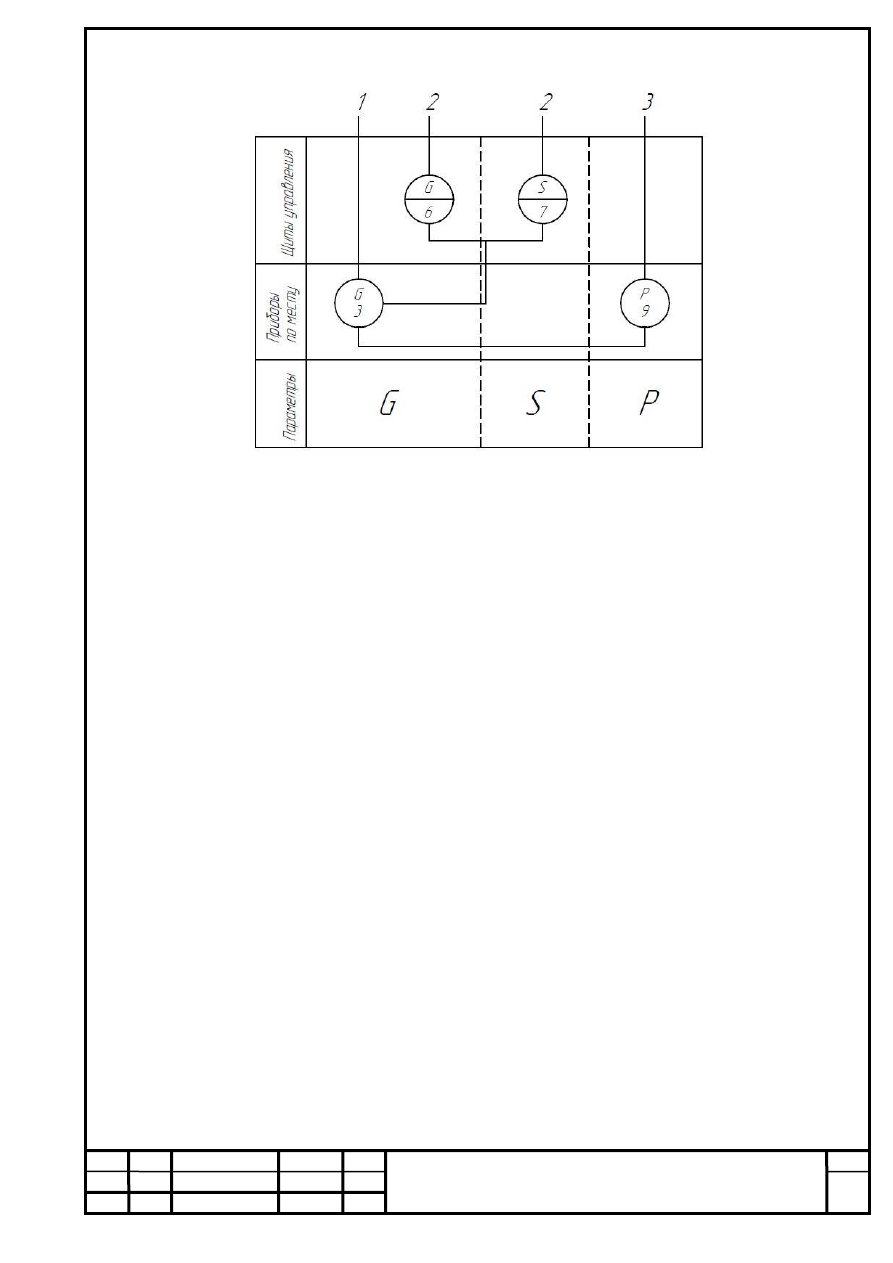
Рисунок 4 – Схема автоматизации работы ЛЭГП с АЗП
Изм. Лист
№ докум.
Подпись Дата
Лист
16
ВлГУ.220700.8/28.10.4.00.ПЗ