Файл: Компьютерное моделирование движения тел в среде с учетом трения.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 12.01.2024
Просмотров: 57
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
[t0, T]. Чем больше величина Δt, тем:
а) меньше вычислений требуется для того, чтобы пройти весь заданный временной интервал;
б) меньшая точность в передаче значений непрерывных функций и
и  их дискретными представлениями - наборами чисел
их дискретными представлениями - наборами чисел  и
и 
Вопрос о точности результатов является в описываемом моделировании одним из центральных. Он распадается на два: как оценить эту точность и можно ли, уменьшая Δt , достигать все большей точности?
Остановимся вначале на первом. Формулы (4), (5) представляют собой применение метода Эйлера для приближенного решения системы дифференциальных уравнений (3). Наиболее приемлемой при использовании этого и родственного ему методов (например, Рунге - Кутта) является эмпирическая оценка точности. Для этого отрезок [t0, T] проходится с некоторым шагом Δt, а затем с существенно меньшим (например, в два раза) шагом. Сравнение результатов в точках t1t2, ..., T позволяет составить представление о реальной точности результатов. Если она недостаточна, то следует повторить процесс с еще меньшим шагом.
Однако уменьшение шага Δtне всегда ведет к улучшению результатов моделирования. Одна из причин заключается в том, что чем меньше шаг, тем больше арифметических действий, ведущих к увеличению глобальной погрешности округления. Другая причина глубже и связана со способом дискретизации - перехода от описания реально непрерывного процесса движения тел к описанию по простейшим формулам (4), (5). Обе причины могут привести к неустойчивости решения, т.е. к получению результатов, не имеющих реально ничего общего с истинными. Обычно неустойчивость становится заметной при повторениях процесса с у
меньшением шага Δt.
Более эффективными при моделировании процессов, описываемых дифференциальными уравнениями, являются методы Рунге - Кутта более высокого порядка аппроксимации, чем метод Эйлера, неявные методы, методы типа «предиктор-корректор», отличающиеся повышенной устойчивостью, и другие, описанные в специальной литературе.
Сила сопротивления. В ряде представленных ниже задач необходимо знать, от чего зависит сила сопротивления при движении в среде. При реальных физических движениях тел в газовой или жидкостной среде трение сильно влияет на характер движения.
Соответствующие закономерности носят эмпирический характер и отнюдь не имеют столь строгой и четкой формулировки, как второй закон Ньютона.
При относительно малых скоростях величина силы сопротивления пропорциональна скорости и имеет место соотношение
 (6)
(6)
где определяется свойствами среды и формой тела.
определяется свойствами среды и формой тела.
Например, для шарика
 - так называемая формула Стокса,
- так называемая формула Стокса,
где - динамическая вязкость среды,
- динамическая вязкость среды,
r - радиус шарика.
Так, для воздуха при t= 20°С и давлении 1 атм μ = 0,0182 , для воды μ. = 1,002
, для воды μ. = 1,002  , для глицерина μ=1480 .
, для глицерина μ=1480 .
При более высоких скоростях сила сопротивления становится пропорциональной квадрату скорости:
 (7)
(7)
Разумеется, линейная по скорости часть силы сопротивления формально также сохранится, но если , то вкладом
, то вкладом 
можно пренебречь.
О величине k2 известно следующее: она пропорциональна площади сечения тела S, поперечного по отношению к потоку, плотности среды и зависит от формы тела. Обычно представляют
среды и зависит от формы тела. Обычно представляют
 (8)
(8)
где с - безразмерный коэффициент лобового сопротивления (рис. 1).
При достижении достаточно большой скорости, когда образующиеся за обтекаемым телом вихри газа или жидкости начинают интенсивно отрываться от тела, значение с в несколько раз уменьшается; для шара оно становится приблизительно равным 0,1.
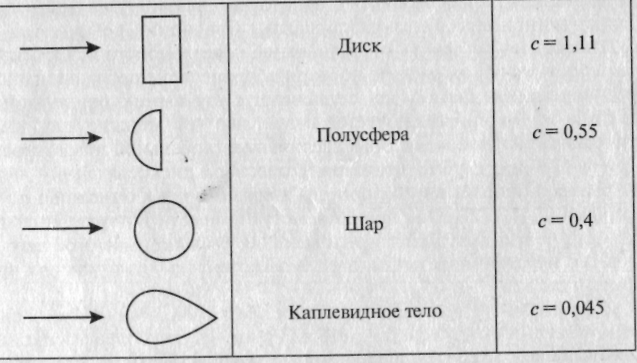
Рис. 1. Значения коэффициента лобового сопротивления для некоторых тел, поперечное сечение которых имеет указанную на рисунке форму
Свободное падение тела.
Математическая модель свободного падения тела - уравнение второго закона Ньютона с учетом двух сил, действующих на тело - силы тяжести и силы сопротивления среды. Движение является одномерным; проецируя силу, скорость и перемещение на ось, направленную вертикально вниз, из (3) получаем
 (9)
(9)
В конкретных задачах можно одной из составляющих силы сопротивления пренебречь (если она заведомо много меньше другой).
Частичное тестирование моделирующей программы можно провести для движения без трения. Аналитическое решение в этом случае общеизвестно.
Входные параметры модели:
Взлет ракеты. Построим простейшую модель вертикального взлета ракеты, приняв гипотезу, что ее масса уменьшается во время взлета по линейному закону:
 (10)
(10)
Double M(double t)
{ double rez;
rez = M0-a*t;
if (rez
return rez;
}
Силу тяги двигателя будем считать постоянной на всем участке взлета.
Уравнение движения примет вид в проекции на вертикальную ось
Однако при самом простом моделировании данного процесса необходимо принять во внимание, что плотность воздуха ρ, входящая в коэффициент k2, убывает по мере подъема ракеты по закону
 ,
,
где h - высота,
 – плотность воздуха вблизи поверхности Земли.
– плотность воздуха вблизи поверхности Земли.
β=1,29*10-4 м--1 - иначе модель будет совершенно неадекватна реальности. Таким образом, модель будет описываться системой двух дифференциальных уравнений для функций v(t) и h(t):
 (11)
(11)
Входные параметры модели:
Движение тела, брошенного под углом к горизонту. Дифференциальные уравнения модели получаются из второго закона Ньютона проецированием скорости и перемещения на горизонтальную и вертикальную оси координат:
(12)
Входные параметры модели:
а) меньше вычислений требуется для того, чтобы пройти весь заданный временной интервал;
б) меньшая точность в передаче значений непрерывных функций
Вопрос о точности результатов является в описываемом моделировании одним из центральных. Он распадается на два: как оценить эту точность и можно ли, уменьшая Δt , достигать все большей точности?
Остановимся вначале на первом. Формулы (4), (5) представляют собой применение метода Эйлера для приближенного решения системы дифференциальных уравнений (3). Наиболее приемлемой при использовании этого и родственного ему методов (например, Рунге - Кутта) является эмпирическая оценка точности. Для этого отрезок [t0, T] проходится с некоторым шагом Δt, а затем с существенно меньшим (например, в два раза) шагом. Сравнение результатов в точках t1t2, ..., T позволяет составить представление о реальной точности результатов. Если она недостаточна, то следует повторить процесс с еще меньшим шагом.
Однако уменьшение шага Δtне всегда ведет к улучшению результатов моделирования. Одна из причин заключается в том, что чем меньше шаг, тем больше арифметических действий, ведущих к увеличению глобальной погрешности округления. Другая причина глубже и связана со способом дискретизации - перехода от описания реально непрерывного процесса движения тел к описанию по простейшим формулам (4), (5). Обе причины могут привести к неустойчивости решения, т.е. к получению результатов, не имеющих реально ничего общего с истинными. Обычно неустойчивость становится заметной при повторениях процесса с у
меньшением шага Δt.
Более эффективными при моделировании процессов, описываемых дифференциальными уравнениями, являются методы Рунге - Кутта более высокого порядка аппроксимации, чем метод Эйлера, неявные методы, методы типа «предиктор-корректор», отличающиеся повышенной устойчивостью, и другие, описанные в специальной литературе.
Сила сопротивления. В ряде представленных ниже задач необходимо знать, от чего зависит сила сопротивления при движении в среде. При реальных физических движениях тел в газовой или жидкостной среде трение сильно влияет на характер движения.
Соответствующие закономерности носят эмпирический характер и отнюдь не имеют столь строгой и четкой формулировки, как второй закон Ньютона.
При относительно малых скоростях величина силы сопротивления пропорциональна скорости и имеет место соотношение
где
Например, для шарика
где
r - радиус шарика.
Так, для воздуха при t= 20°С и давлении 1 атм μ = 0,0182
При более высоких скоростях сила сопротивления становится пропорциональной квадрату скорости:
Разумеется, линейная по скорости часть силы сопротивления формально также сохранится, но если
можно пренебречь.
О величине k2 известно следующее: она пропорциональна площади сечения тела S, поперечного по отношению к потоку, плотности
где с - безразмерный коэффициент лобового сопротивления (рис. 1).
При достижении достаточно большой скорости, когда образующиеся за обтекаемым телом вихри газа или жидкости начинают интенсивно отрываться от тела, значение с в несколько раз уменьшается; для шара оно становится приблизительно равным 0,1.
Рис. 1. Значения коэффициента лобового сопротивления для некоторых тел, поперечное сечение которых имеет указанную на рисунке форму
Свободное падение тела.
Математическая модель свободного падения тела - уравнение второго закона Ньютона с учетом двух сил, действующих на тело - силы тяжести и силы сопротивления среды. Движение является одномерным; проецируя силу, скорость и перемещение на ось, направленную вертикально вниз, из (3) получаем
(9)В конкретных задачах можно одной из составляющих силы сопротивления пренебречь (если она заведомо много меньше другой).
Частичное тестирование моделирующей программы можно провести для движения без трения. Аналитическое решение в этом случае общеизвестно.
Входные параметры модели:
-
начальная высота тела; -
начальная скорость тела; -
величины, определяющие коэффициенты сопротивления среды и
и 
Взлет ракеты. Построим простейшую модель вертикального взлета ракеты, приняв гипотезу, что ее масса уменьшается во время взлета по линейному закону:
(10)Double M(double t)
{ double rez;
rez = M0-a*t;
if (rez
return rez;
}
Силу тяги двигателя будем считать постоянной на всем участке взлета.
Уравнение движения примет вид в проекции на вертикальную ось
Однако при самом простом моделировании данного процесса необходимо принять во внимание, что плотность воздуха ρ, входящая в коэффициент k2, убывает по мере подъема ракеты по закону
где h - высота,
β=1,29*10-4 м--1 - иначе модель будет совершенно неадекватна реальности. Таким образом, модель будет описываться системой двух дифференциальных уравнений для функций v(t) и h(t):
(11)Входные параметры модели:
-
m0 - начальная масса ракеты, заправленной топливом; -
mкон - остаточная масса после полного выгорания топлива; -
α - расход топлива; -
величины, определяющие k2, - коэффициент сопротивления воздуха (линейной составляющей силы сопротивления можно заведомо пренебречь); -
Fтяги - сила тяги двигателя (принять постоянной).
Движение тела, брошенного под углом к горизонту. Дифференциальные уравнения модели получаются из второго закона Ньютона проецированием скорости и перемещения на горизонтальную и вертикальную оси координат:
(12)
Входные параметры модели:
-
m - масса тела; -
ν - начальная скорость; -
α - угол начального наклона вектора скорости к горизонту; -
величины, определяющие коэффициенты сопротивления среды k1и k2.