Файл: Исследования работы и эксплуатационных характеристик гироазимуткомпаса "вега".docx
Добавлен: 29.10.2023
Просмотров: 213
Скачиваний: 4
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
2.3 Определение основных эксплуатационных характеристик чувствительного элемента гирокомпаса.
3.1. Использование прибора в процессе плавания.
3.2 Оценка возможной погрешности в определении места судна.
3.2. Оценка возможной погрешности в значении поправки гирокомпаса.
3.3. Оценка возможной величины поперечного линейного сноса.
3.1. Использование прибора в процессе плавания.
При использовании прибора в процессе плавания вахтенный помощник обязан проводить штурманский контроль функционирования гирокомпаса. Знать особенности использования прибора, возможность и причины возникновение ошибок курсоуказания, характер погрешностей.
Контроль функционирования гирокомпаса на ходу судна и при стоянке на якоре возложен на помощника капитана, несущего ходовую вахту. Во время стоянки у причала обязанности по штурманскому контролю за работающим гирокомпасом выполняет судовой специалист, в заведование которого входит данный курсоуказатель. Несмотря на то, что оперативный контроль на ходу судна или стоянке его на якоре возложен на вахтенного помощника, судовой специалист обязан дважды в сутки обходить помещения, в которых установлены приборы комплекта, и проверять следующие параметры:
— температуру и общий уровень шума в гиропосту, отсутствие посторонних звуков и запахов, исправность вентиляции, температуру агрегата;
— температуру прибора ВГ-1Б: признаками его перегрева до срабатывания сигнализации являются помутнение прозрачной части колпака и значение температуры, превышающее 50°;
— величину напряжений между фазами с помощью переключателя 2SA1 “Контроль” и вольтметра 2PV1;
— показания сигнальных табло в приборах ВГ-1А, ВГ-2А, ВГ-ЗА;
— согласованность показаний всех репитеров и прибора ВГ-ЗА;
— показания шкал интегратора в приборе ВГ-6;
— исправность курсографа 23Т: наличие бумажной ленты, согласованность записи четвертного и курсового перьев, наличие судовых отметок времени;
— показания шкал широты и скорости в приборе ВГ-ЗА;
— режим функционирования индукционного лага и сопряжение лага с гирокомпасом.
Контроль при несении ходовых вахт. Контроль функционирования гирокомпаса на ходу судна предусматривает выполнение комплекса мер по проверке гирокомпаса, а в случае обнаружения отказа в схеме — принятие своевременных энергичных мер по обеспечению навигационной безопасности судна.
При заступлении на ходовую вахту вахтенный помощник капитана контролирует:
— режим работы гирокомпаса (должно гореть табло “Гирокомпас”);
— курс судна по прибору ВГ-ЗВ и магнитному компасу;
— поправки обоих приборов;
— широту места и ее наименование, которые введены в прибор ВГ-ЗВ;
— показания шкал и режим работы интегратора: тумблер 6SJ "Выкл. двиг. ИК" должен быть включен;
— режим работы индукционного лага и значение вводимой от лага скорости: шкала скорости прибора ВГ-ЗВ должна находиться в положении "Лаг", а контроль осуществляют по показаниям шкал лага и вольтметра 3SVJ в приборе ВГ-ЗВ; если лаг не сопряжен с компасом, то значение скорости выставляют вручную по шкале скорости и контролируют по вольтметру 3SVJ прибора ВГ-ЗВ; при этом должно гореть табло "Ручной ввод V прибора ВГ-ЗВ;
— отметку времени на курсограмме на момент приема вахты, которую должен выполнить сменяющийся помощник капитана;
— положение переключателя 23SJ "Питание ДСР-2" прибора 23К: переключатель должен находиться в положениях "Стабилизир." или "Судовая сеть";
— четкость записи курса и четверти;
— состояние сигнальных табло: должно гореть табло “Гирокомпас”, может также гореть табло “Ручной ввод” ;
— согласованность показаний всех находящихся на ходовом мостике репитеров с показаниями прибора ВГ-ЗВ.
В течение ходовой вахты вахтенный помощник обязан:
— ежечасно, а также после каждого поворота судна производить сличение показаний магнитного компаса и прибора ВГ-ЗВ;
— контролировать работу всех репитеров, сличая их показания с показаниями прибора ВГ-ЗВ;
— контролировать курс судна по прибору ВГ-ЗВ;
— контролировать ввод скорости в прибор ВГ-ЗВ по показаниям вольтметра 3PV и периодически контролировать показания сигнальных табло этого прибора;
— контролировать бесперебойную работу курсографа, своевременно делать необходимые отметки времени на курсограмме;
— при изменении скорости судна, когда лаг не используется, в течение 3 мин после маневра, необходимо ввести новое значение скорости в прибор ВГ-ЗВ;
— один раз в течение вахты откорректировать ввод широты с учетом ее наименования;
— один раз в течение вахты определить поправку гирокомпаса и убедиться в ее стабильности в пределах зоны нечувствительности
, если поправка взята спустя полтора — два часа после маневра;
— при постановке судна на якорь с разрешения капитана остановить лентопротяжный механизм курсографа.
В случае срабатывания одного из сигнальных табло или визуально замеченных нарушений в работе приборов вахтенный помощник капитана немедленно выполняет три операции:
— проверяет показания всех остальных сигнальных табло в приборах ВГ-ЗВ и ВГ-6;
— сличает показания магнитного и гироскопического компасов;
— снимает показания шкал интегратора в приборе ВГ-6 и сравнивает их с показаниями, которые были приняты при заступлении на вахту.
3.2 Оценка возможной погрешности в определении места судна.
Оценка возможной погрешности в определении места судна, полученного способом пеленгования двух береговых ориентиров в условиях, когда гирокомпас вследствие состоявшегося маневрирования имеет инерционную девиацию.
Таблица 3.1
| № вар. | Широта | Азимут А2 | Расст. L | Скорос. V1=V2 | Курс до манёвра КК1 | Курс до манёвра КК2 | Ддлител. манёвра t1 | Комп.пеленг ориент.О1 КП1 | Комп.пеленг ориент.О2 КП2 | Время t2 |
| 9 | 60 | 96 | 10,5 | 17 | 180 | 350 | 8 | 130 | 225 | 10 |
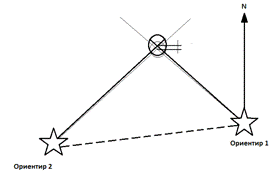
Рис. 3.1
По формуле составил программу:

где



В1=-В2=174310-8 см-1с (от широты не зависят); параметры m=0,02565 c-1 (от широты не зависит); n=0,0003875 с-1 (от широты не зависит). Значения В3 и q см. в таблицах 3.2 и 3.3.
Таблица 3.2
| | 0 | 30 | 40 | 50 | 60 | 70 | 75 | 80 |
| В3 (см-1с) | 63510-8 | 69810-8 | 74110-8 | 82310-8 | 96510-8 | 125810-8 | 175010-8 | 251110-8 |
Таблица 3.3
| | 0 | 30 | 40 | 50 | 60 | 70 | 75 | 80 |
| q (c-1) | 1.06410-3 | 0.9810-3 | 09110-3 | 0.8210-3 | 0.7010-3 | 0.5410-3 | 0.4310-3 | 0.2710-3 |
При расчетах будем иметь в виду, что в течении времени маневра t1=t, а после окончания маневра значение t1 остается фиксированным, а значение t непрерывно растет. Рассчитали суммарную инерционную девиацию в интервале времени от t = 0 до t = 7200 сек. (с шагом Δt = 180 сек.)
На основании формулы и полученных данных построим график суммарных инерционных девиаций.
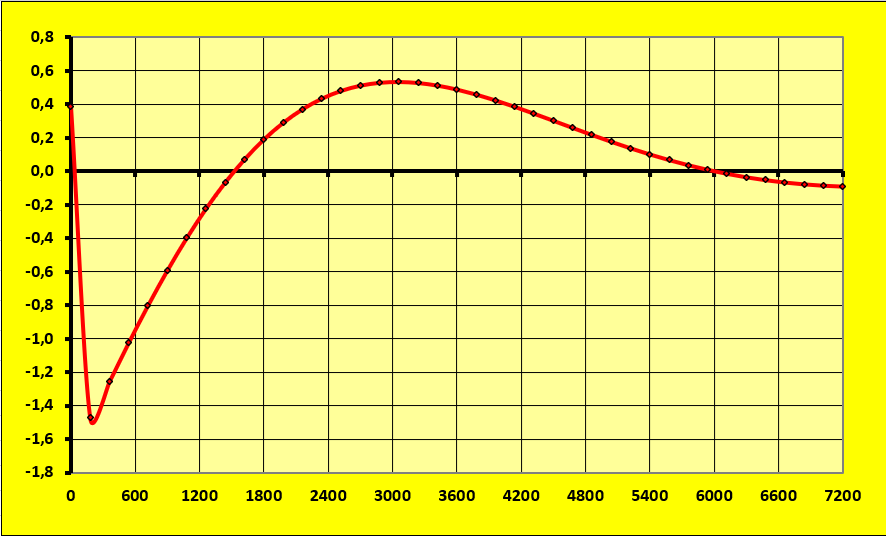
Суммарная инерционная девиация. Рис. 3.2
В соответствии с заданным значением времени t2=10 мин. (600 секунд) найдем величину δj(факт.) = - 0,97˚.