Файл: Исследования работы и эксплуатационных характеристик гироазимуткомпаса "вега".docx
Добавлен: 29.10.2023
Просмотров: 217
Скачиваний: 4
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
2.3 Определение основных эксплуатационных характеристик чувствительного элемента гирокомпаса.
3.1. Использование прибора в процессе плавания.
3.2 Оценка возможной погрешности в определении места судна.
3.2. Оценка возможной погрешности в значении поправки гирокомпаса.
3.3. Оценка возможной величины поперечного линейного сноса.
3.2. Оценка возможной погрешности в значении поправки гирокомпаса.
Произвести оценку возможной погрешности в значении поправки гирокомпаса при ее определении по навигационным створам в условиях, когда после маневра судна существует инерционная девиация.
Таблица 3.3
| № вар. | Широта места манёвра | Компасный курс | Скороостьдо манёвра V1 | Скорость после маневра V2 | Длительность манёвра, мин | Момент времени t2 |
| 9 | 50 | 334 | 4 | 22 | 5 | 80 |
Произвели оценку возможной погрешности в значении поправки гирокомпаса при ее определении по навигационным створам в условиях, когда после маневра судна существует инерционная девиация, равноускоренное движение, t1=15 мин. Используя табл. 3.4 инерционной девиации, равноускоренного движения для времени маневра 5 мин. построили кривую суммарной инерционной девиации гирокомпаса «Вега» для стандартного маневра ΔVN = -25 узл.
Таблица 3.4
Т
| 0 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 | 45 | 50 | 55 | 60 |
| 0 | 1 | 0,8 | 0,5 | 0,3 | 0 | -0 | -0 | -0 | -0 | -0 | -0 | -0 |
Т
| 65 | 70 | 75 | 80 | 85 | 90 | 95 | 100 | 105 | 110 | 115 | 120 |
| -0 | -0 | -0 | -0 | -0 | 0 | 0,1 | 0,1 | 0,1 | 0,1 | 0,1 | 0,1 |
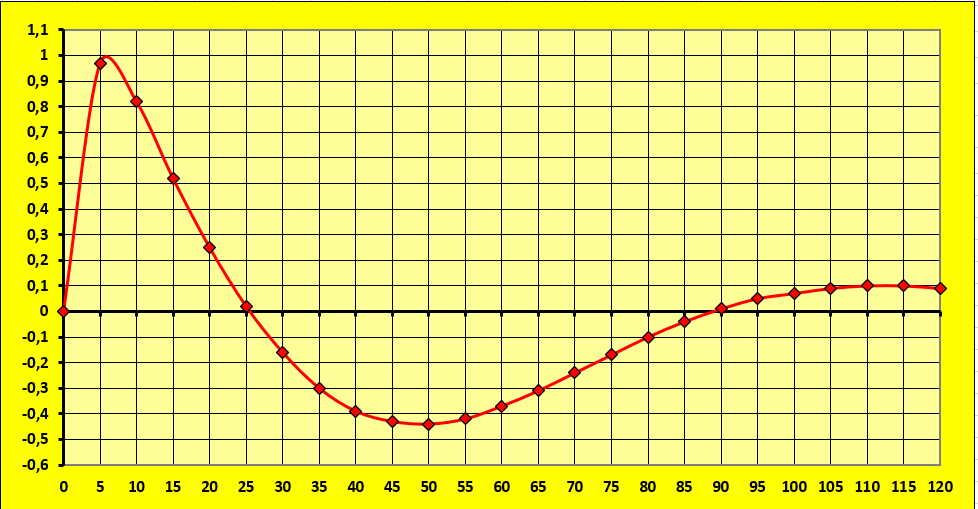
Погрешность гирокомпаса. Рис. 3.3
Выбрали δj(табл.) = -0,1˚ на заданный момент времени t2 = 80 мин. после начала маневра.
Определили фактическую величину девиации δj(факт.) = 0,06˚, пересчет производили по формуле:


Оценили погрешность ξΔГК, допущенную в определении величины поправки гирокомпаса в момент времени t1 = 5 мин. по формуле: ξΔГК= -dJ(факт.)(t2)= -0,06˚.
Так как фактическое значение инерционной девиации составило δj(факт.) = 0,06˚, то делаем вывод, что при ускорении на прямом курсе возникает инерционная погрешность. На величину данной погрешности влияет разница скорости конечной и начальной, время совершения маневра, компасный курс.
3.3. Оценка возможной величины поперечного линейного сноса.
Произвести оценку возможной величины поперечного линейного сноса (бокового смещения) судна, возникающего в результате появления инерционной девиации гирокомпаса при маневрировании. По формуле поперечного сноса судна при управлении по ГАК «Вега», используя заданные условия по таблице 3.6:

Таблица 3.6
| № вар. | 9 |
| | 70 |
| КК1=КК2 | 10 |
| V1 | 7 |
| V2 | 23 |
| T1 | 5 |
Таблица 3.6
| t, сек | 0 | 180 | 360 | 540 | 720 | 900 | 1080 | 1260 | 1440 | 1620 | 1800 | 1980 | 2160 | 2340 |
| d, o | -0,84 | -15 | -38,7 | -58,3 | -74,1 | -86,1 | -94,6 | -99,9 | -102 | -102 | -99,9 | -95,7 | -90 | -83 |
| | | | | | | | | | | | | | | |
| t, сек | 2520 | 2700 | 2880 | 3060 | 3240 | 3420 | 3600 | 3780 | 3960 | 4140 | 4320 | 4500 | 4680 | 4860 |
| d, o | -75,1 | -66,5 | -57,4 | -48,2 | -39 | -30 | -21,3 | -13,1 | -5,5 | 1,503 | 7,819 | 13,41 | 18,27 | 22,4 |
| | | | | | | | | | | | | | | |
| t, сек | 5040 | 5220 | 5400 | 5580 | 5760 | 5940 | 6120 | 6300 | 6480 | 6660 | 6840 | 7020 | 7200 | - |
| d, o | 25,81 | 28,53 | 30,59 | 32,05 | 32,95 | 33,35 | 33,31 | 32,87 | 32,12 | 31,09 | 29,85 | 28,44 | 26,93 | - |
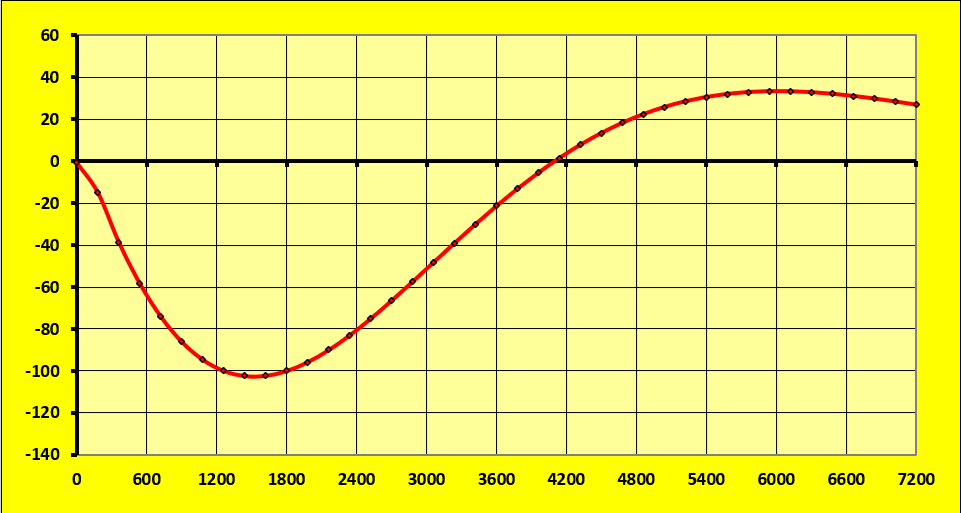
Суммарный снос. Рис. 3.4
Используя полученную кривую, найдем величины d1max = 33,3498 в = 5940 сек. и
d2max =-102.35 в = 1800сек., а значит сумма ½d1max½+½d2max½ будет равна 135,705.
-
Диагностика неисправностей гирокомпаса.
4.1 Диагностика неисправностей согласно заданному варианту.
Всю необходимую информацию я записал в таблицу 4.1, с указанием вероятных причин неисправностей и способов их устранения.
Таблица 4.1
| Признаки неисправности | Вероятная причина | Способ устранения |
| Слишком быстрое изменение скорости. Вычисление поправок в конце маневра или сразу после окончания маневра. Дефект следящей система. | Обеспечить более плавное изменение скорости судна. Помнить, что инерционные погрешности носят гироскопический характер и не возникают сразу после начала инерционных возмущений, а также не исчезают после их прекращения. Замена или ремонт устройств следящей системы или всей конструкции данной системы. |
| Нарушена работа гироблока. Перегрев гироблока. | Замена гироблока. Грамотный ремонт гироблока. |
Заключение
В ходе проделанной работы я ознакомился с практическим принципом реализации технического средства судовождения - двухрежимным гирокурсоуказателем с косвенным управлением “ВЕГА-М”.
В конструкции реализован блочный принцип построения в совокупности представляющий комплекс с системами обеспечивающими его работу.
Электромеханическая схема позволяет компенсировать скоростную погрешность, сигналы коррекции вводятся в качестве дополнительных сигналов в те же цепи управления, которые обеспечивают связь гироскопа с Землей (линия азимутальной и вертикальной коррекции).
Инерциальную погрешность таким способом скомпенсировать довольно трудно так как для этого должны прикладываться весьма малые управляющие моменты соизмеримые с возмущающими.
Особенностью ГАК Вега является то, что благодаря отсутствию погрешности 2-го рода, и незначительной погрешности 3-го рода накопления погрешностей не происходит, это можно увидеть из графиков суммарных инерционных погрешностей, из за особенности конструкции гироблока
Особенность гирокомпасов с косвенным управлением — возможность их использования врежиме гироазимута, т. е. корректируемого гироскопа направления. Это качество особенно ценно при маневрировании в течение не слишком продолжительных промежутков времени.
Необходимо понимать, что на практике в условиях часто повторяющихся маневров какие-либо расчеты по определению инерционных погрешностей производить нецелесообразно. Однако судоводитель должен критически оценивать их возможную величину и характер изменения.
При использовании прибора в процессе плавания вахтенный помощник обязан проводить штурманский контроль функционирования гирокомпаса. Знать особенности использования прибора, возможность и причины возникновение ошибок курсоуказания, характер погрешностей.
Судовой специалист должен следить за исправностью прибора, проводить периодические проверки в соответствии с регламентом.
Глубина поиска неисправностей судовыми специалистами ограничена перечнем неисправностей, которые им разрешено устранять.
Список литературы
-
Смирнов Е.Л. и др. Технические средства судовождения (теория) – М., Транспорт, 1987 г. -
Смирнов Е.Л.. и др. Технические средства судовождения (конструкция и эксплуатация) – СПб.: “Элмор”, 2000 г. -
Бек Ю.Ф Навигационные приборы и системы - М., “Воениздат”, 1982, с. 463. -
Богданович М.М. Применение гироскопических приборов и систем на морских судах – М., Транспорт, 1977. -
Коган В.М., Чичинадзе М.В. Судовой гирокомпас “Вега’ – М., Транспорт. 1983.