ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 24.11.2023
Просмотров: 81
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
На каждом участке обозначено поперечное сечение с соответствующим номером, направлением движения x и внутренний изгибающий момент Mz, на оси которого будут записываться уравнения равновесия для выделенной (отсечённой) координатой x части участка. В правой колонке таблицы 1. выписаны уравнения равновесия и соответствующие выражения для Mz.
Таблица 1.
В данном случае при определении значений Mz участки были выбраны так, что отпала необходимость в определении значений реакций опоры. Полученные выражения Mz переносятся в таблицу 2.
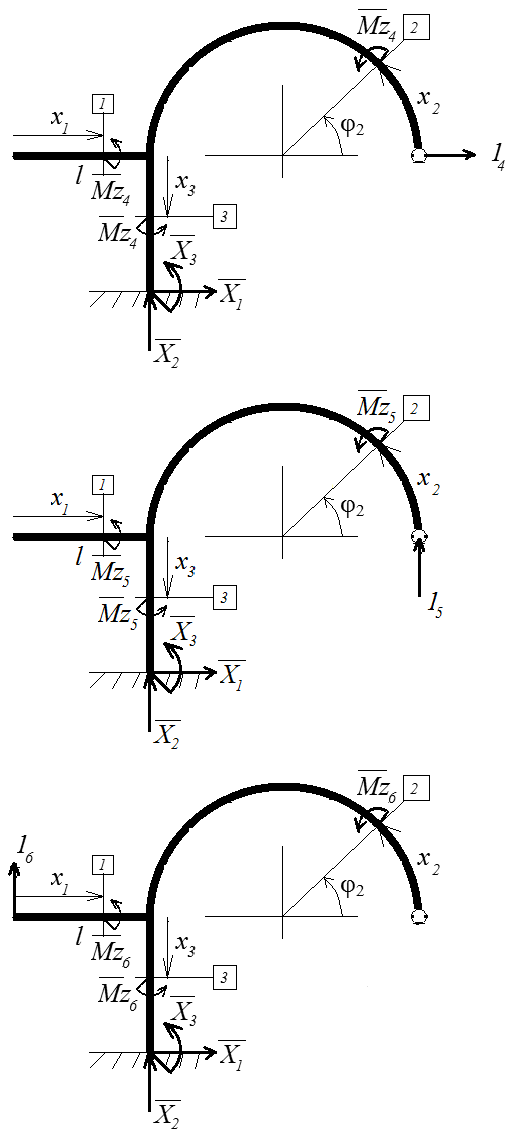
| | 4ВС. Уравнения равновесия X1 + 14 = 0 X2 = 0 X3 – 14* l = 0 По x1: Mz4 = 0 По x2: Mz4 + 14* l*sin(x2/l) = 0 По x3: Mz4 – 14* x3 = 0 |
| | 5ВС. Уравнения равновесия X1 = 0 X2 + 15 = 0 X3 + 15*2l = 0 По x1: Mz5 = 0 По x2: Mz5 + 15* l*(1 - cos(x2/l)) = 0 По x3: Mz5 + 15* 2l = 0 |
| | 6ВС. Уравнения равновесия X1 = 0 X2 + 16 = 0 X3 – 16*l = 0 По x1: Mz6 – 16* x1 = 0 По x2: Mz6 = 0 По x3: Mz6 – 16* l = 0 |
Таблица 2.
| Интервал значений аргумента | Mz4 | Mz5 | Mz6 | Mz7 | |
| 0 ≤ x1 ≤ l | 0 | 0 | x1 | 0 | |
| 0 ≤ x2 ≤ πl | -l*sin(x2/l) | - l(1-cos(x2/l)) | 0 | - l2(1-cos(x2/l)) | |
| 0 ≤ x3 ≤ l | x3 | -2l | l | 2l2 | |
Запишем выражения для всех необходимых КП:
lMzMz
lMzMz
1 2 3 4 5
l Mz Mz
44
0
EJz
dx1
0
EJz
dx2
0
EJz
dx3
l Mz Mz
lMzMz
l Mz Mz
45 4 5 dx1 4 5 dx2 4 5 dx3 54
0 EJz
0 EJz
0 EJz
l Mz Mz
lMzMz
l Mz Mz
46 4 6 dx1 4 6 dx2 4 6 dx3
0 EJz
0 EJz
0 EJz
l Mz Mz
lMzMz
l Mz Mz
47 4 7 dx1 4 7 dx2 4 7 dx3
0 EJz
0 EJz
0 EJz
l Mz Mz
lMzMz
l Mz Mz
55 5 5 dx1 5 5 dx2 5 5 dx3
0 EJz
0 EJz
0 EJz
l Mz Mz
lMzMz
1 2 3 4 5
l Mz Mz
56 5 6 dx1 5 6 dx2 5 6 dx3
0 EJz
0 EJz
0 EJz
l Mz Mz
lMzMz
l Mz Mz
57 5 7 dx1 5 7 dx2 5 7 dx3
0 EJz
0 EJz
0 EJz
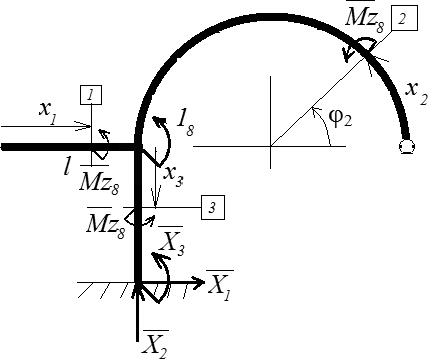 | 8ВС. Уравнения равновесия X1 = 0 X2 = 0 X3 + 18 = 0 По x1: Mz8 = 0 По x2: Mz8 = 0 По x3: Mz8 + 18= 0 |
Система уравнений приобретает вид δ44X4+ δ45X5+ δ46P6+ δ47q7 = 0
δ54X4+ δ55X5+ δ56P6+ δ57q7 = 0
X1 = X2= X3 = X4 = X5 =
Решение системы УРП и УР даёт:
Определение перемещений в статически неопределимой системе представляет не менее важную задачу, поэтому этот аспект рассмотрим подробнее. Если искомое перемещение уже есть в списке перемещений вектора {Δ} и входит в систему УРП, например
δ64X4+ δ65X5+ δ66P6+ δ67q7 = Δ6
Рис. 6. 8-я вспомогательная система
В таблице 3 заполняется незаполненная в таблице 2 колонка, которая и была предусмотрена под новую ВС.