Добавлен: 11.01.2024
Просмотров: 405
Скачиваний: 8
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Курсовая работа
по дисциплине
«Робототехника»
на тему
«Системы управления робототехническими средствами»
Содержание
Введение 3
1.Постановка задачи 5
1.1.Принцип работы манипулятора 4 пальца и встроенная горелка 6
2.Система управления манипулятора и функциональное построение 12
2.1 Описание схемы состава системы управления манипулятора робота 12
2.2. Расчет параметров системы управления манипулятора 15
3. Принципиальная электрическая схема для манипулятора 23
4.Построение системы управления 24
Заключение 27
Список используемых источников 28
Приложение А 30
Приложение Б 31
Введение
Среди многих видов деятельности по обеспечению безопасности и защиты общества особо важное место занимают вопросы, связанные с предотвращением терактов с применением взрывных устройств. Одним из способов предотвращения терактов является разработка и внедрение мобильных роботов, предназначенных для выявления, обезвреживания и уничтожения взрывных устройств. [4]
Одной из таких платформ стал многофункциональный мобильный робототехнический комплекс (ММРК) «Варан», являющийся результатом совместного сотрудничества специалистов различных областей. Мобильный робот был создан специалистами НИИ СМ МГТУ им. Н.Э. Баумана и специалистам ОАО «Специальное конструкторское бюро приборостроения и автоматики». Все работы по разработке велись с использованием современных программных продуктов, например, таких как Autodesk Inventor 10, который использовался как основа для построения трехмерных моделей [8].
Мобильный робот «Варан», помимо обнаружения, обезвреживания, уничтожения на месте или доставки в специальном контейнере в безопасное место взрывных устройств, способен также выполнять такие задачи, как ведение разведки в городских или полевых условиях и работы в опасных для здоровья и жизни человека местах (в условиях радиационного, химического и биологического заражения).
Он может работать как в управляемом удаленным оператором режиме, так и в автономном режиме, по заранее введенной в него программе.
На гусеничную платформу «Варана», в зависимости от поставленной задачи, может устанавливаться различное рабочее оборудование. Например, двупальцевый манипулятор, системы видеонаблюдения или водомет, служащий для уничтожения взрывных устройств [9].
Мобильный робот «Варан» уже прошел ряд лабораторных и полевых испытаний и уже успел доказать свою необходимость и эффективность.
1.Постановка задачи
ММРК «Варан» предназначен для дистанционного проведения визуальной разведки, поиска и первичного диагностирования подозрительных на взрывное устройство (ВУ) предметов с помощью телевизионных камер и специального навесного оборудования; дистанционного обезвреживания ВУ, загрузки ВУ в специальные контейнеры для эвакуации, а также выполнения технологических операций по обеспечению доступа к ВУ.
Актуальность работы заключается в том, что помимо обнаружения ВУ и загрузки ВУ в специальные контейнеры для эвакуации, должен быть оборудован средствами для безопасного обезвреживания ВУ. Таким образом для расширения возможностей робота в курсовой работе предлагается:
-
заменить классический двупальцевый схват робота на схват «4 пальца»; -
добавить контейнер с термитным зарядом и горелку для поджога заряда.
Объект исследования – система управления манипулятора многофункционального мобильного робототехнического комплекса «Варан» со встроенной горелкой.
Цель работы – разработка схемы управления манипулятора работа со встроенной горелкой для создания функции поджога фитиля термитного заряда.
Для достижения поставленной цели в работе решаются следующие задачи:
-
провести обзор ММРК «Варан»; -
проанализировать принцип работы манипулятора; -
привести описание схемы состава системы управления манипулятора; -
реализовать расчет параметров системы управления манипулятора; -
провести построение принципиальной электрической схемы манипулятора; -
провести построение системы управления манипулятора.
-
Принцип работы манипулятора 4 пальца и встроенная горелка
ММРК «Варан» разработан предприятием «Ковровский электромеханический завод». Образец демонстрировался на IX Международной выставке вооружения, военной техники и боеприпасов Russia Arms EXPO-2013, проходившей в Нижнем Тагиле.

Рисунок 1 – ММРК «Варан»
ММРК «Варан» предназначен для:
-
дистанционного проведения визуальной разведки, поиска и первичного диагностирования подозрительных на ВУ предметов с помощью телевизионных камер и специального навесного оборудования; -
дистанционного обезвреживания ВУ; -
загрузки взрывных устройств в специальные контейнеры для эвакуации; -
выполнения технологических операций по обеспечению доступа к ВУ.
Шасси робота имеет гусеничный движитель, манипулятор комплектуется сменными губками схвата, спереди установлена штанга-удлинитель с механизмом наведения, сзади может буксироваться тележка. Управление роботом осуществляется с компактного пульта дистанционного управления посредством антенного устройства на дальности до 1 км или по кабелю на дальности до 200 м. [6]. Пять телевизионных камер различного назначения позволяют эффективно проводить опознавание и визуальную разведку при проведении операций, а также ориентироваться в пространстве. Длительность непрерывного функционирования робота от бортовых аккумуляторов составляет не менее 4 часов, двигаясь под уклоном до 20 градусов. Манипулятор выдвигается на 1 метр от переднего края корпуса и способен в полностью вытянутом состоянии поднимать грузы до 30 кг, в сложенном состоянии – до 50 кг. Опасные устройства робот помещает в специальные эвакуационные контейнеры. Может работать даже в снегу, но при высоте покрова не более 15 см. [7]
Таблица 1 – Характеристики ММРК «Варан».
| Характеристика | Значение |
| Габариты (ДШВ), м | 1,2х0,7х0,7 |
| Масса снаряжённого робота, кг, не более | 185 |
| Диапазон регулирования скорости передвижения, м/с | 0-0,5 |
| Число степеней подвижности манипулятора | 5 |
| Диапазон регулирования скорости, м/с | 0-0,5 |
| Преодолеваемые роботом препятствия: | |
| -порог высотой, м до | 0,2 |
| -косогор по курсу с углом наклона, не более, град | 20 |
| -склон в поперечном направлении с углом наклона, град | 20 |
| -стандартный лестничный марши с углом наклона, град | 30 |
| Глубина преодолеваемой водной преграды, м не более | 0,1 |
| Глубина преодолеваемой снежного покрова, м не более | 0,15 |
| Максимальный вылет манипулятора: | |
| -от оси вращения, м не менее | 1,5 |
| -от переднего края корпуса, м | 1,0 |
| -от левого и правого борта корпуса МР, м | 1,0 |
| Угол поворота манипулятора относительно вертикальной оси, град | 360 |
| Максимальное раскрытие губок схвата, мм | 250 |
| Усилие на губках схвата (два значения), Н | 800,1000 |
| Грузоподъемность манипулятора | |
| -на вылете 1,5м от оси опорно-поворотного устройства, кг до | 30 |
Продолжение таблицы 1
| -на высоте 0,6 м впереди МР, кг до | 50 |
| Визуальное распознавание предметов на расстоянии от МР | |
| -размерами от 0,1 до 3,0 м, м | 1,5 |
| -размерами от 0,001 до 0,5 м, м | 0,5-3 |
| Питание МР от двух батарей, В | 12 |
Состав комплекта:
-
транспортное средство на гусеничном шасси; -
манипулятор с пятью степенями подвижности; -
бортовой комплекс телевизионных средств (6 ТВ-камер); -
бортовая катушка с кабелем управления; -
светозвуковая сигнализация; -
пульт дистанционного управления (ПДУ); -
комплект выносных антенн; -
выносная система видео наблюдения; -
комплект дополнительного оборудования.
Исполнительный механизм робота – это его механическая рука или манипулятор [4]. Манипулятор – это механизм для управления пространственным положением орудий и объектов труда. Он состоит из шарнирно соединенных звеньев, как рука человека из костей, связанных суставами. Манипуляторы включают в себя подвижные звенья двух типов:
-
звенья, обеспечивающие поступательные движения; -
звенья, обеспечивающие вращательные перемещения.
Сочетание и взаимное расположение звеньев определяет степень свободы (подвижности) робота, а также область действия манипуляционной системы робота.
Последнее (рабочее) звено манипулятора может быть захватывающим или специализированным. Захватывающее звено, называемое схватом, является аналогом кисти человеческой руки. Схват служит для удержания и переноса предметов. Специализированное звено – звено с закрепленным инструментом, например, для сверления, резки, сварки.
Совместные перемещения звеньев позволяют схвату описывать в пространстве (ограниченном размерами и конструкцией манипулятора) траекторию практически любой формы.
Выделяют механические и немеханические схваты.
Механические схваты:
-
двухпальцевый схват, -
трехпальцевый схват, -
многопальцевый схват.
Немеханические схваты:
-
магнитный схват, -
вакуумный схват.
Иногда последним звеном манипулятора служит не схват, а в зависимости от предназначения робота соответствующий рабочий инструмент: дрель, гаечный ключ, краскораспылитель, сварочная горелка, медицинский инструмент и др.
В данной курсовой работе рассматривается применение схвата «4 пальца» манипулятора робота. Такой схват представлен на рисунке 2.

Рисунок 2 – Схват манипулятора «4 пальца»
С целью обеспечения безопасного обезвреживания ВУ в курсовой работе предлагается добавить на борт ММРК «Варан» специализированный контейнер с термитным зарядом и горелку. Таким образом требуется описать и разработать систему управления манипулятором робота со встроенной горелкой для создания функции поджога фитиля термитного заряда.
Перемещение звеньев манипулятора обеспечивают приводы. Они являются источниками механической энергии, нужной для движения звеньев.
Источником механической энергии может быть:
-
электродвигатель; -
гидропривод; -
пневмоцилиндр.
Электропривод обладает рядом достоинств: не загрязняет окружающую среду отработанным газом или маслом, относительно малошумен; к тому же современные полупроводниковые схемы управления дешевы и надежны в работе. Все эти качества делают электропривод наиболее перспективным как в настоящем, так и в будущем.
В пневматическом приводе используется пневмоцилиндр, т. е. цилиндр, в котором поршень перемещается под действием сжатого воздуха. Особенностью пневмопривода является то, что используемое в нем рабочее вещество – воздух – легко сжимается, вследствие этого пневмопривод используется лишь для роботов, производящих операции с мелкими и легкими деталями, например, в технологических процессах приборостроения, часовой промышленности и пр. Другая причина, сдерживающая применение роботов с пневмоприводом – шум, которым сопровождается выброс из пневмоцилиндра отработавшего воздуха.
Гидравлический привод аналогичен пневматическому; в нем роль двигателя выполняет гидроцилиндр. На рисунке 3 показана схема такого привода, сообщающего манипулятору возвратно-поступательное движение.
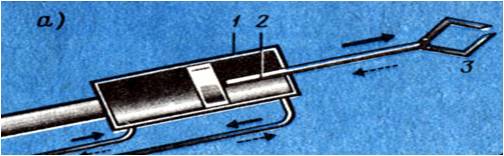
Рисунок 3 – Гидропривод: 1 – цилиндр, 2 – поршень, 3 – шток.
Принцип его действия следующий. В цилиндр 1, в котором находится поршень 2, соединенный с помощью штока с манипулятором 3, поступает под давлением жидкость, которая приводит в действие поршень. Гидравлический привод имеет свои преимущества. Прежде всего, это сравнительно небольшая масса привода и высокое быстродействие. Важное свойство гидропривода – возможность получения с его помощью малой скорости при сохранении плавности перемещения. Благодаря этим качествам гидропривод получил широкое распространение в мощных промышленных роботах.