Добавлен: 11.01.2024
Просмотров: 409
Скачиваний: 8
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
По способам управления манипулятором можно разделить манипуляторы с адаптивным, дистанционным и программным управлением. Самым популярным способом управления механизмами робота по сей день остается программный способ, когда робот работает по заранее разработанной для него программе. Поэтому в курсовой работе разработан программный способ управления манипулятором.
2.Система управления манипулятора и функциональное построение
2.1 Описание схемы состава системы управления манипулятора робота
Структурированная схема подключения призвана дать вам более глубокое понимание внутреннего устройства системы, а также позволяет найти место для дополнительных подключений и улучшить качество продукции.
В современном мире создание систем управления не обходится без микроконтроллеров, так как цифровые компоненты никаким образом не меняют собственные данные под воздействием температуры, времени и т.д. Более того, современные микроконтроллеры имеют широкий набор периферийных устройств.
Так как манипулятор имеет 5 степеней свободы, должно быть достаточно контуров управления и контура захвата. Особенностью контура управления захватом является отсутствие обратной связи. Усилители нужны для управления приводами и захватами. Для отслеживания текущего состояния манипулятора требуется пять датчиков угла, обратная связь по скорости также должна вводиться по трем осям, для этого требуется 3 дополнительных датчика скорости.
Использование показаний датчиков в контурах управления требует установки преобразователей и, возможно, усилителей, если сигнал слишком слабый. В общем виде структурная схема системы управления манипулятором представлена на рисунке 4.

Рисунок 4 – Структурная схема системы управления манипулятором в общем виде
Команды и данные, полученные с пульта оператора, передаются в генератор протоколов обмена, где полученная информация проверяется на наличие ошибок, происходит декодирование команд и извлечение данных из полученного пакета данных. Это же устройство должно сформировать ответный пакет с данными, полученными от датчиков электромеханической системы. Разумнее реализовать такое устройство программно.
Также на основе информации о текущем состоянии электромеханической системы блок управления принимает решение о возможности выполнения полученных команд. Он также предоставляет данные о текущем состоянии обработчика генератору протоколов обмена, которыми он заполняет ответный пакет данных на коммутационную консоль.
Цепи управления двигателем предназначены для создания определенного крутящего момента в двигателях с использованием усилителей, а усилители управляются блоком широтно-импульсной модуляции (ШИМ) [2].
Обратная связь обеспечивается системой датчиков, включающей датчики и преобразователи сигналов. Основные контуры управления подключены к пульту оператора через генератор протоколов обмена, а вторичные контуры управления скоростью на основании, руке и локте подключены к блоку управления, который рассчитывает необходимые управляющие воздействия.
Объектом управления является непосредственно манипулятор с пятью степенями свободы и захват. Мониторинг текущего состояния объекта осуществляется с помощью системы датчиков. Поскольку манипулятор имеет 5 степеней свободы, требуется 5 датчиков угла, а для реализации дополнительных 3 степеней обратной связи по скорости необходимо установить дополнительные датчики скорости. Таким образом, в системе управления будет 2 вида контуров управления приводом, один с обратной связью по скорости, второй без. Оба типа закрываются через консоль оператора. Их блок-схемы показаны на рисунках 5 и 6.

Рисунок 5 – Блок-схема контура с обратной связью по скорости

Рисунок 6 – Блок-схема контура без обратной связи по скорости
Поскольку в управлении скоростью без обратной связи нет датчиков скорости, но необходимо избегать перегрузки двигателя, например, параметром контроллера.
Схема управления захватом не имеет обратной связи, поэтому захват не требует установки датчиков. Таким образом, блок-схема системы управления манипулятором будет выглядеть так, как показано на рисунке 7.
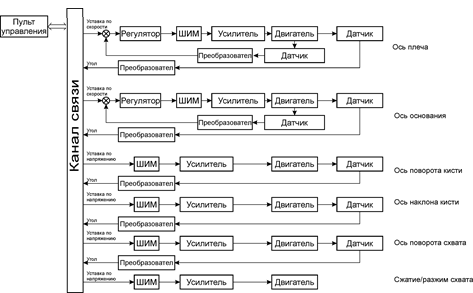
Рисунок 7 – Структурная схема системы управления схватом манипулятора
2.2. Расчет параметров системы управления манипулятора
Главным блоком в системе управления манипулятором робота является двигатель.
Двигатель представляет собой электромеханический преобразователь, преобразующий электрическую энергию в механическую. В зависимости от вида потребляемого или отдаваемого в сеть тока двигатели подразделяются на двигатели переменного и постоянного тока. Двигатели переменного тока, в свою очередь, делятся на синхронные, асинхронные и коллекторные.
Конструкция двигателей постоянного тока сложнее, стоимость выше и эксплуатация дороже асинхронных, поэтому двигатели постоянного тока применяются в приводах, требующих широкого и плавного регулирования скорости, либо в автономных установках, когда двигатели питаются от батареи. Выбор исполнительного двигателя должен соответствовать требованиям технического задания:
-
основное назначение электродвигателя; -
тип и параметры блока питания; -
конструктивные особенности и массогабаритные показатели двигателя; -
тип системы управления двигателем; -
условия окружающей среды, в которых нужно работать; -
ориентировочная мощность на валу двигателя, КПД двигателя; -
требования надежности, работа на отказ, возможность проведения планового технического осмотра; -
стоимость и эксплуатационные расходы [1].
Использование двигателей переменного тока невозможно, так как разработанная система относится к классу бортовых систем. Выбор двигателя переменного тока потребует использования дополнительного источника переменного напряжения.
Двигатель постоянного тока лишен этого недостатка: он может питаться от аккумулятора и генератора постоянного тока, что соответствует техническому заданию. Следовательно, в качестве желаемого двигателя можно использовать бесконтактный двигатель постоянного тока. Однако, как было сказано выше, сложная схема управления для данного класса двигателей предъявляет дополнительные требования к конструкции схемы управления.
В соответствии с требованиями к курсовой работе номинальная мощность двигателя должна быть 350 Вт. Поставленным требованиям удовлетворяет планетарный мотор-редуктор King Right Motor М1080 с двигателем постоянного тока (рис. 8).

Рисунок 8 – Мотор-редуктор King Right Motor М1080
Характеристики электродвигателя:
-
мощность – 350 Вт; -
напряжение питания – 12 В; -
выходная скорость – 1000-3200 об/мин; -
направление – двунаправленное; -
диаметр вала –17 мм; -
тип двигателя: щелочной [3].
Управление исполнительным органом осуществляется путем подачи на него сигнала рассогласования. Однако почти всегда величина сигнала рассогласования слишком мала для восприятия исполнительным элементом. Чтобы усилить ее используются усилители. Существует много типов усилителей: релейные, электромагнитные, магнитные, полупроводниковые.
Все они имеют положительные и отрицательные стороны. Коэффициент усиления реле обеспечивает хороший коэффициент усиления U, I, P. Имеет высокий КПД благодаря низкому переходному сопротивлению; имеет идеальную изоляцию между источником сигнала и нагрузкой. Однако в момент переключения возникает искра, разрушающая контакты. Это приводит к плохой надежности и низкой скорости. Кроме того, системы управления имеют тенденцию мерцать при использовании реле. Твердотельные усилители очень быстрые. Отрицательной его стороной является остаточное напряжение 0,3 В.
Для устранения недостатков релейных усилителей применяют как линейные усилители (рис. 9), так и усилители с импульсной модуляцией.
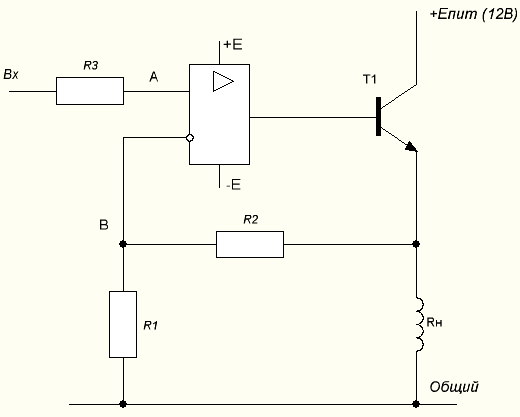
Рисунок 9 – Линейный усилитель
Рассмотрим принцип действия линейного усилителя.
Коэффициент усиления такой схемы равен:
 (1)
(1)Для определения необходимого коэффициента усиления по току и по напряжению необходимо выбрать интерфейс, который будет использоваться в разрабатываемой системе. Существует 4 основных предела изменения абсолютных значений сигналов напряжения постоянного тока:
-
от -5В до +5В; -
от 0В до +5В; -
от 0В до +10В; -
от -10В до +10В.
Так как в разрабатываемой системе предполагается использование микроконтроллера, работающего в диапазоне напряжений от 0 до +5 В, логично выбрать именно такой интерфейс. Выбранный двигатель работает при напряжении 12 В, максимальная выходная мощность с микроконтроллера 5 В., следовательно, коэффициент усиления разработанного усилителя должен быть 12/5 = 2,4.
Теперь определимся с коэффициентом усиления по току. Пределов изменения силы тока сигналов постоянного тока также четыре:
-
от 0 А до +5 мА; -
от -5 мА до +5 мА; -
от 0 А до +20 мА; -
от 4 мА до +20 мА.
Максимальный ток на выходе микроконтроллера 25 мА. Минимум 0 мА. Ближайший интерфейс от 0 А до +20 мА. Мы будем использовать его в разрабатываемой системе. Теперь, зная требуемый коэффициент усиления и подставляя его в формулу (1), получаем

Элементы R2 и R1 выбираются в соответствии с таблицами серий с учетом рекомендуемых значений не более 1 МОм. Это связано с тем, что для правильной работы операционного усилителя его входы должны иметь одинаковые потенциалы (для идеального операционного усилителя; для реальных операционных усилителей разница Uсм обычно составляет 0,35 мВ).
Падение напряжения в точке B равно
 поэтому, чтобы на первом входе (точка А) был такой же потенциал, R3 берут равным по номиналу параллельному включению R1 и R2. Однако, при изменении температуры суммарное сопротивление группы R1, R2 будет изменяться по-другому, чем у резистора R3. Если брать очень большие величины сопротивлений данное различие в температурных коэффициентах очень быстро приведет к высокой разности входных потенциалов на входах ОУ, и он выйдет в нерабочий режим – насыщение.
поэтому, чтобы на первом входе (точка А) был такой же потенциал, R3 берут равным по номиналу параллельному включению R1 и R2. Однако, при изменении температуры суммарное сопротивление группы R1, R2 будет изменяться по-другому, чем у резистора R3. Если брать очень большие величины сопротивлений данное различие в температурных коэффициентах очень быстро приведет к высокой разности входных потенциалов на входах ОУ, и он выйдет в нерабочий режим – насыщение.Рассчитаем коэффициент β, который должен иметь выбираемый транзистор для обеспечения тока 10А на выходе схемы (в соответствии с выбранным двигателем). Максимальный ток на выходе ОУ составляет 3 мА. Этот ток является током базы транзистора. А т.к. есть ток базы, то появляется ток коллектора, который равен βIб. Отсюда мы можем найти интересующий нас коэффициент
Ни один транзистор не обладает таким коэффициентом усиления по току. Поэтому используются составные транзисторы, которые позволяют увеличить β за счет того, что β∑= β1β2β3. Электрическая схема такой группы представлена на рисунке 10.
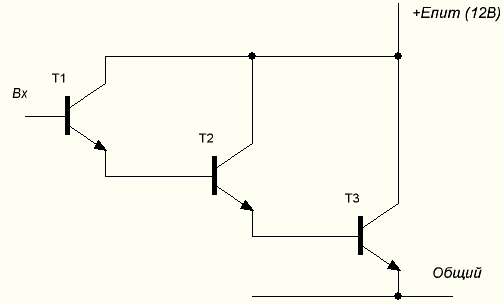
Рисунок 10 – Схема усиления на составных транзисторах
Входной ток является базовым током транзистора Т1. Так как на транзисторе Т1 есть ток базы, то появляется ток коллектора транзистора Т1, что является достаточным током базы для транзистора Т2. Под действием тока базы Iб2 транзистор Т2 открывается и появляется Ik