ВУЗ: Пермский национальный исследовательский политехнический университет
Категория: Лекция
Дисциплина: Системы реального времени
Добавлен: 15.11.2018
Просмотров: 6686
Скачиваний: 11
6
2-3
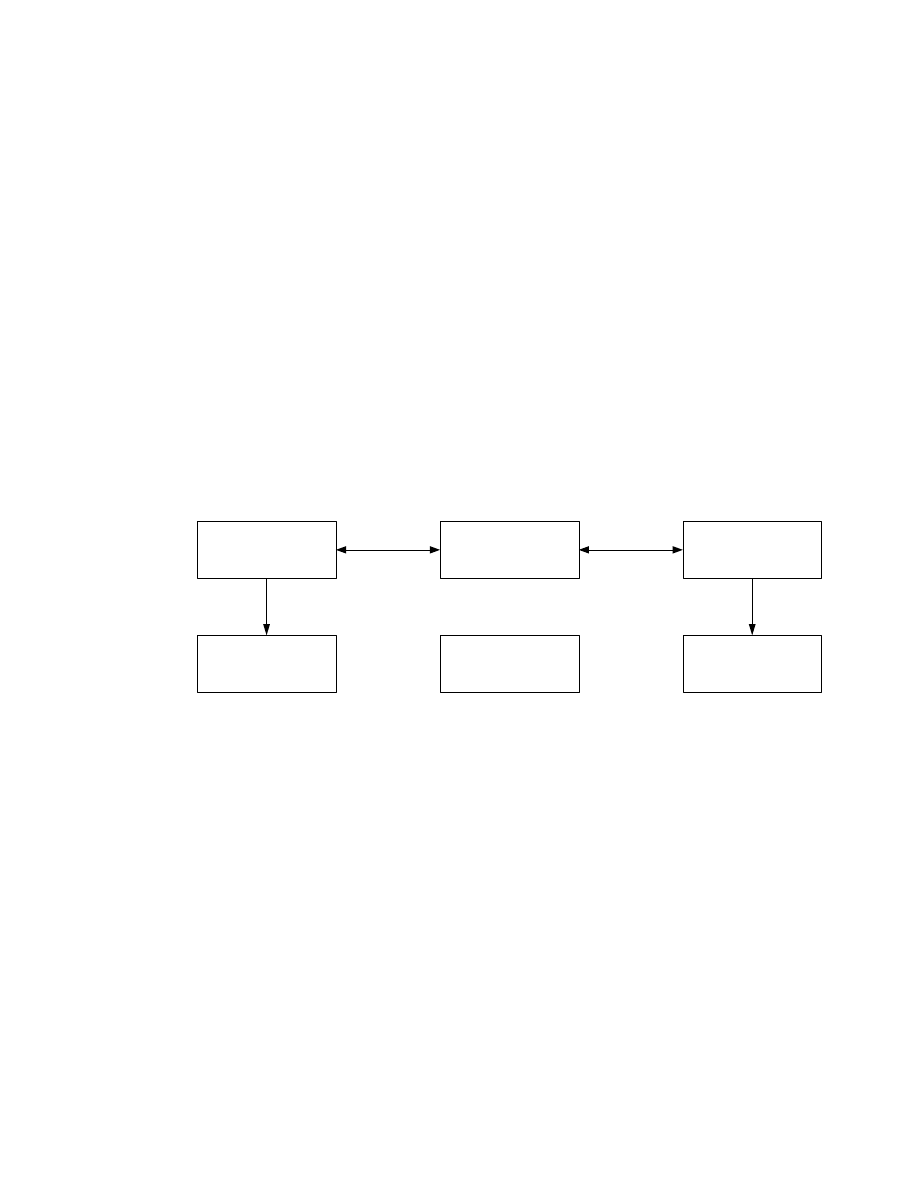
– машинный интерфейс.
Контролируемая подсистема диктует требования в реальном
масштабе времени и выдает основные характеристики объекта
управления.
Контролирующая
подсистема
управляет
вычислениями,
управляет связью с внешним оборудованием.
Операционная подсистема обеспечивает связь с оператором.
Контролирует полную деятельность системы.
Интерфейс приложения реализуется с помощью датчиков и
исполнителя элементов.
Машинный интерфейс обеспечивает связь конечных устройств
информационной системы с подсистемой визуализации оператора.
Объект
управления
Промышленные
контроллеры
ПК
Операционная
подсистема
Контролируемая
подсистема
Контролирующая
подсистема
Интерфейс
приложения
Интерфейс
машинный
Рис.1.
Контролирующая
подсистема
должна
обеспечивать
распределение ресурсов таких как память, доступ к сети, устройство
длительного хранения информации.
Любая контролирующая подсистема, кроме обеспечения
интерфейса операционной системы (ОС), должна обеспечивать
контроль записи на внешние устройства.
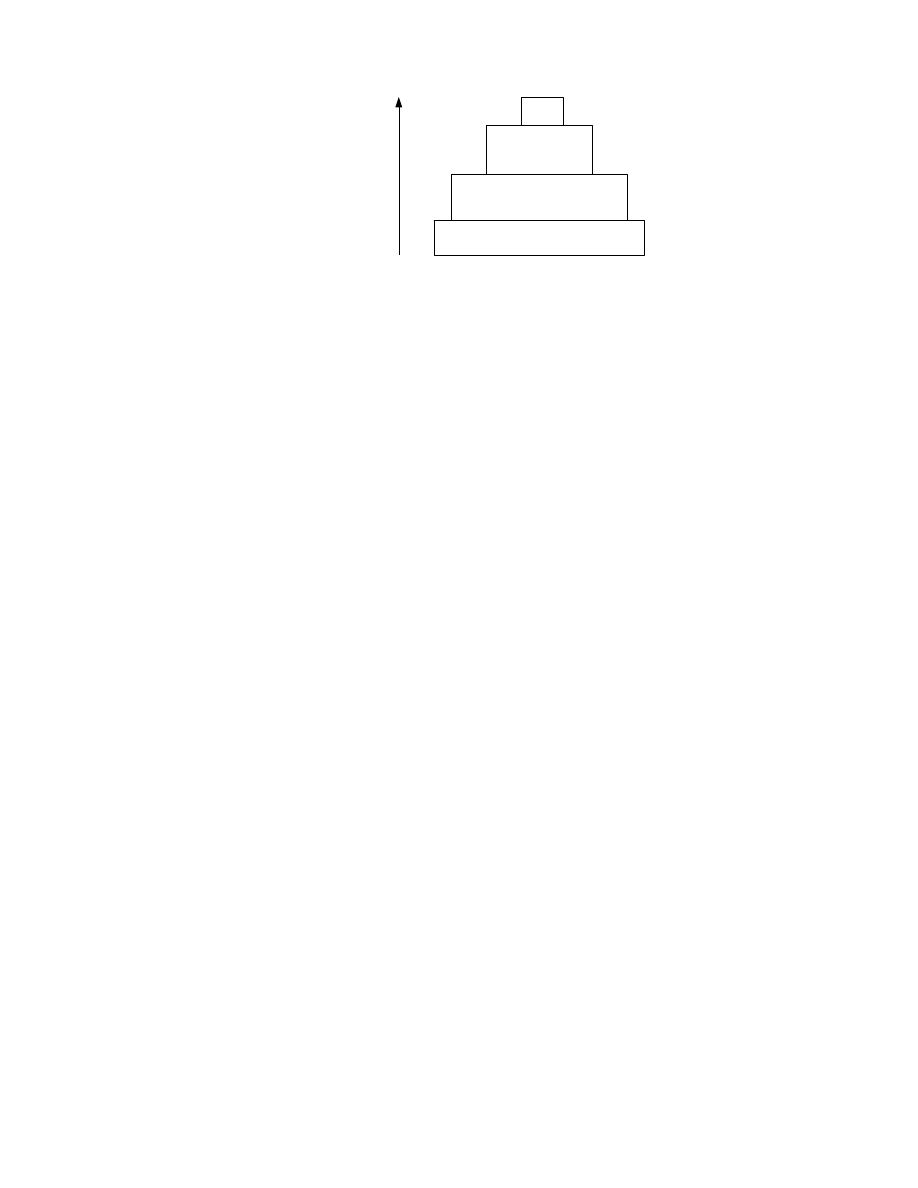
Место систем РВ в информационных системах
Сложность разработки связана с требованиями надежности и
безопасности. Например, надежность – температура, осадки, ветер.
7
СРВ
Неизвестные
системы
???
Автоматические
+
Автоматизированные СРВ
Человеко-машинные системы
С
л
ож
но
ст
ь
ра
зр
аб
от
ки
Рис.2.
Для СРВ требуется обеспечение вероятности отказа системы 10
-
10
в час. Данная вероятность обеспечивается на самолетах. На
российских самолетах – 10
-9
. в системах полета спутника – 10
-7
часа.
Для СРВ выдвигается требование по работоспособности,
позволяющее при отказе узла произвести восстановление его функций
и обеспечить вероятность отказа на уровне 10
-6
-10
-4
часа.
Требования к системам реального времени
1.
Требование
по
времени
выполнения
задач
и
функционированию систем предъявляется к следующим компонентам
системы:
1.1.
период функционирования;
1.2.
крайний критический срок выполнения;
1.3.
время выполнения;
1.4.
суммарное время продолжительности выполнения задач
(
зависит от наличия ошибок).
2.
Требование
о
возможности
параллельного
выполнения
нескольких
задач
(возможность
построения
алгоритма
псевдопараллельного исполнения задач).
3.
Предсказуемость.
4.
Учет максимального времени отклика на события (а не среднего,
как в обычных системах).

8
5.
Особые требования в вопросах безопасности систем (защита от
постороннего вмешательства в алгоритм системы).
6.
Возможность безотказной работы в течение длительного
периода времени (включаются требования по обслуживанию в СРВ).
Для СРВ требуется проведение регламентных работ после 16
часов непрерывной работы.

9
Общие характеристики систем реального времени
Большие и сложные системы (разрабатываются больше года,
поэтому алгоритмы функционирования могут быть сложными).
1.
Распределенные системы.
2.
Взаимодействие
с
окружающим
миром.
Жесткое
взаимодействие с аппаратурой. Четкий контроль всех операций.
3.
Выполнение
задач
зависит
от
времени
(как
и
последовательность выполнения задач, так и время исполнения).
4.
Сложность тестирования.
Так как в СРВ включается много различных функций и для
тестирования СРВ требуется создание групп, не занимающихся
разработкой этой системы, но понимающих ее функционирование.
Данные характеристики позволяют выявить множество систем
РВ, функционирующих в реальном мире.
Задачи СРВ
СРВ представляют собой набор взаимодействующих между
собой заданий или задач.
Задача является одиночным объектом, управление которым
осуществляется оболочкой СРВ.
В зависимости от количества задач и от их вида определяется
время функционирования СРВ.
Задачи классифицируют по двум категориям:
1.
Требование по времени функционирования:
1.1.
задачи в ЖРВ (жестком реальном времени);
1.2.
задачи в МРВ (мягком реальном времени);
1.3.
задачи в «нереальном времени».
2.
Вид или тип функционирования:
2.1.
периодические задачи;

10
2.2.
апериодические задачи (асинхронные);
2.3.
спорадические задачи;
2.4.
фоновые задачи;
2.5.
аппендикс.
Задача ЖРВ – это задача, чье логически правильное или
своевременное исполнение считается критическим для действия всей
системы.
Предельный срок исполнения называется жестким сроком
исполнения. Неспособность удовлетворять этому требованию ведет к
отказу всей системы.
Задача МРВ – это задача, в которой исполнение не критично по
времени, но ее исполнение желательно для системы (предельный срок
исполнения – мягкий крайний срок исполнения задается диапазоном).
Задача «нереального времени» - это задача, для которой нет
требований по своевременному выполнению.
Периодические задачи
Периодические задачи – это задачи, которые переходят в
состояние выполнения через строго заданный период и выполняются
каждый цикл функционирования в системе. Например, обработка и
контроль сигнала.
Для СРВ требуется четкое и своевременное выполнение каждой
периодической задачи (см. рис.3).