ВУЗ: Пермский национальный исследовательский политехнический университет
Категория: Лекция
Дисциплина: Системы реального времени
Добавлен: 15.11.2018
Просмотров: 6689
Скачиваний: 11
11
t
D1
D2
M0
M1
M2
M3
Tц
D2
D1
5
мс
20
мс
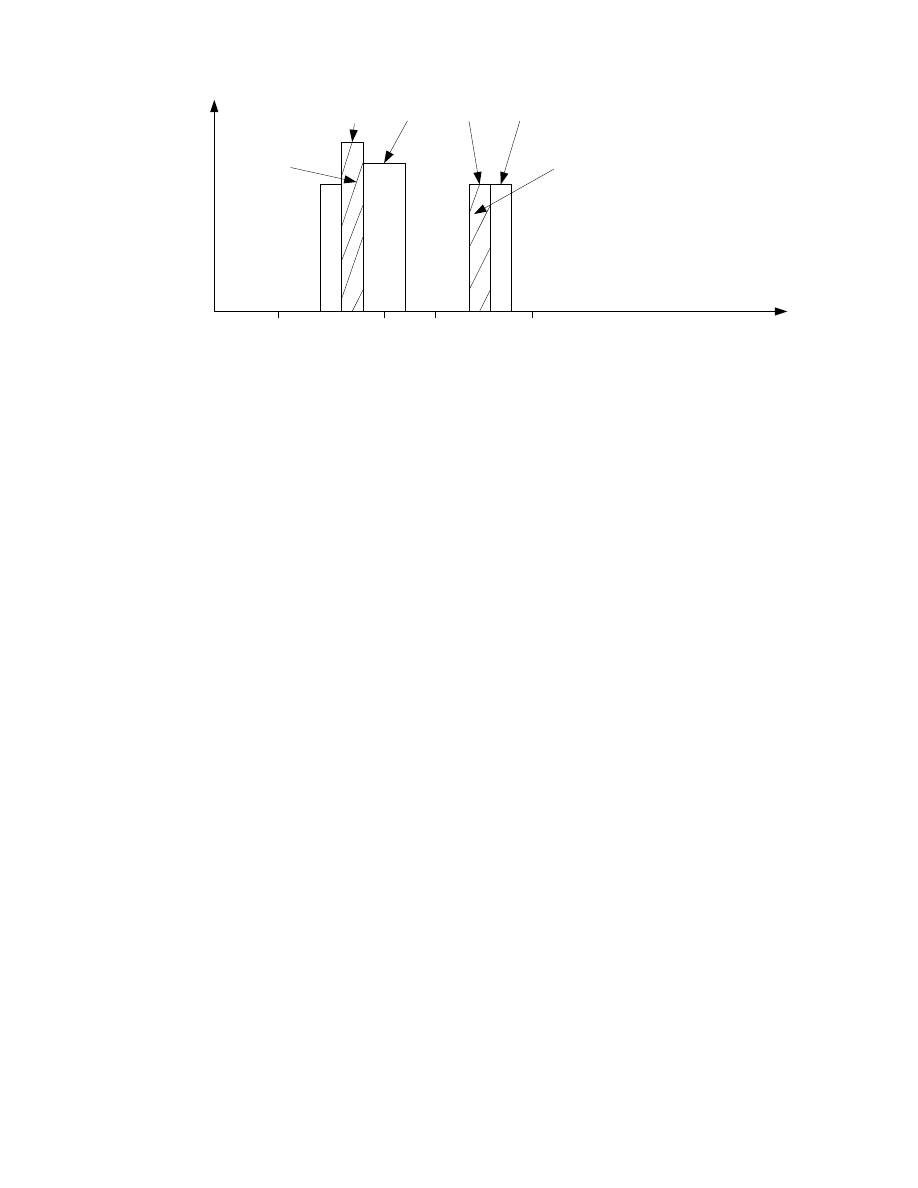
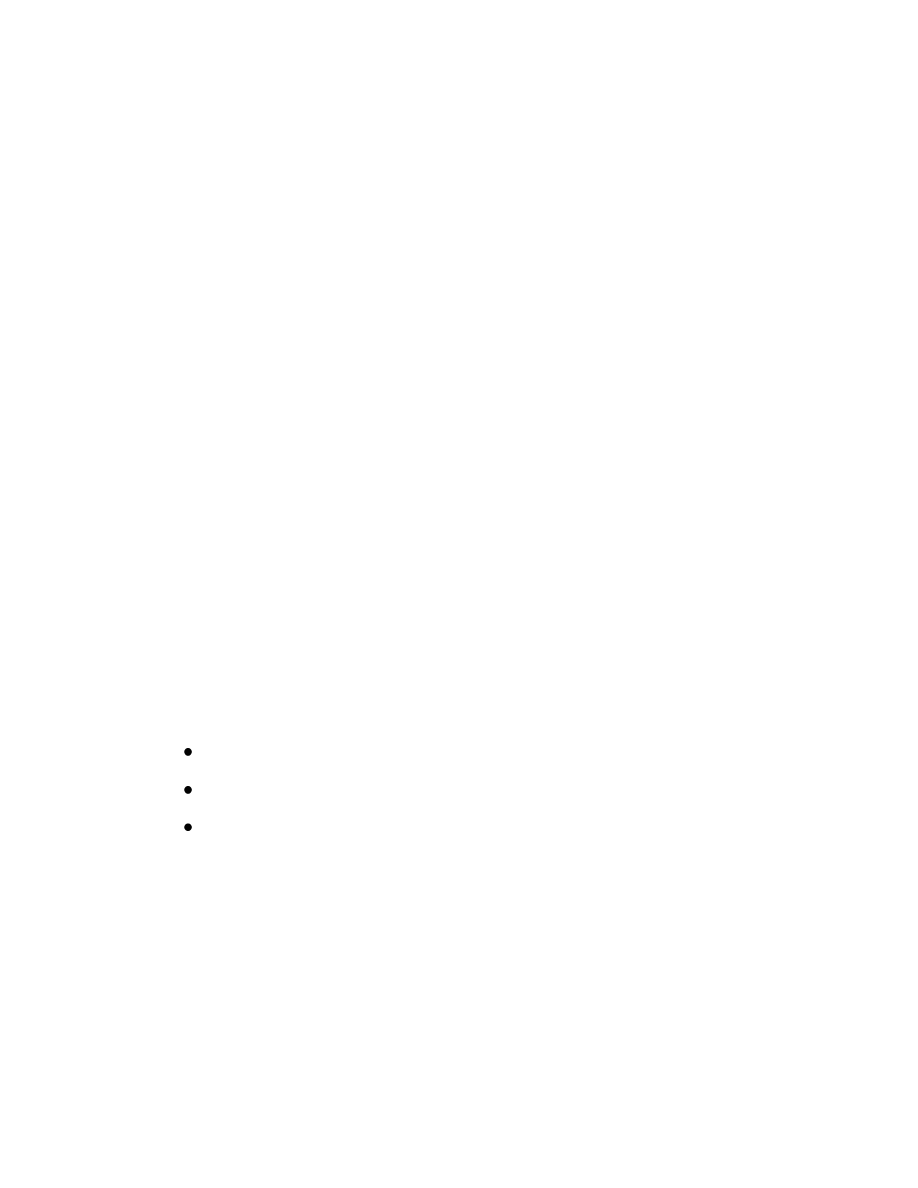
Рис.3.
Т
ц
– время цикла (единица измерения в СРВ). Цикл делится на
несколько групп (метки).
Периодическая задача выполняется в строго отведенное ей
время, каждый цикл. Запуск периодической задачи может
осуществляться несколько раз за цикл в зависимости от количества
меток (сколько меток, столько раз можно запускать цикл).
Характеризуется жестким крайним сроком исполнения.
Апериодические задачи
Апериодические задачи – это задачи, имеющие минимальный
приоритет в системе и выполняющиеся по событию. Характеризуются
наличием мягкого крайнего срока исполнения.
Функционирование осуществляется только в том случае, если
периодические задачи не выполняются.
К функциям апериодических
задач относятся функции
диагностики, выдача справочной информации и сохранение
информации на внешнем носителе.
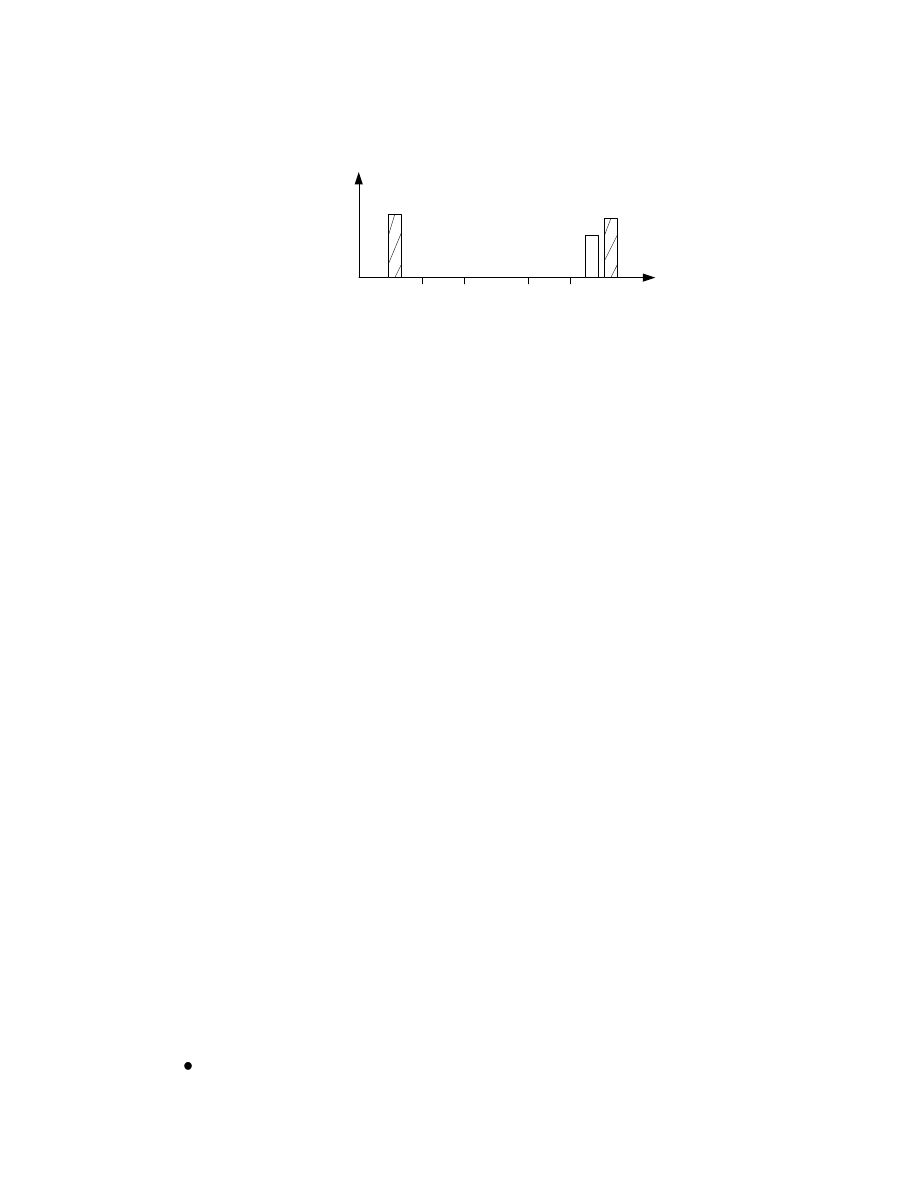
Спорадические задачи
Спорадические задачи – это апериодические задачи с жестким
крайним сроком исполнения.
12
Приоритет устанавливается на уровне периодических задач.
Спорадические задачи имеют непредсказуемый характер.
t
M0
M1
M2
M3
Tц
Рис.4.
Для обработки выделяется отдельная периодическая задача,
которая будет контролировать выполнение.
Фоновые задачи
Фоновые задачи – это задачи, для которых предельный срок
исполнения не задается, либо устанавливается мягкий крайний срок
исполнения.
Функционируют в конце каждой метки и только при условии
простоя вычислительного узла (при отсутствии других задач).
Может исполняться несколько циклов функционирования
системы.
Задачи аппендиксы
Задачи аппендиксы – это задачи, которые исполняются до старта
ОС и имеют приоритет выше, чем сама ОС.
Данные задачи связаны с доступом к аппаратуре, например,
установка триггеров, регистров и временных меток.
Планирование задач
Планирование задач – алгоритм построения очереди задач на
выполнение.
Алгоритмы:
статические
13
динамические
Статические алгоритмы основаны на применении основных
характеристик задач и подразумевают построение примерного плана
их исполнения.
Достоинства:
1. Если система предсказуема на первом шаге, то она будет
предсказуема на всех других.
2. Система может пойти неверно, если последовательность
построена неверно.
Недостатки:
1. Использование в каждом цикле исполнения задачи одной и той
же последовательности задач.
2. Изменение очередности исполнения задач не допускается.
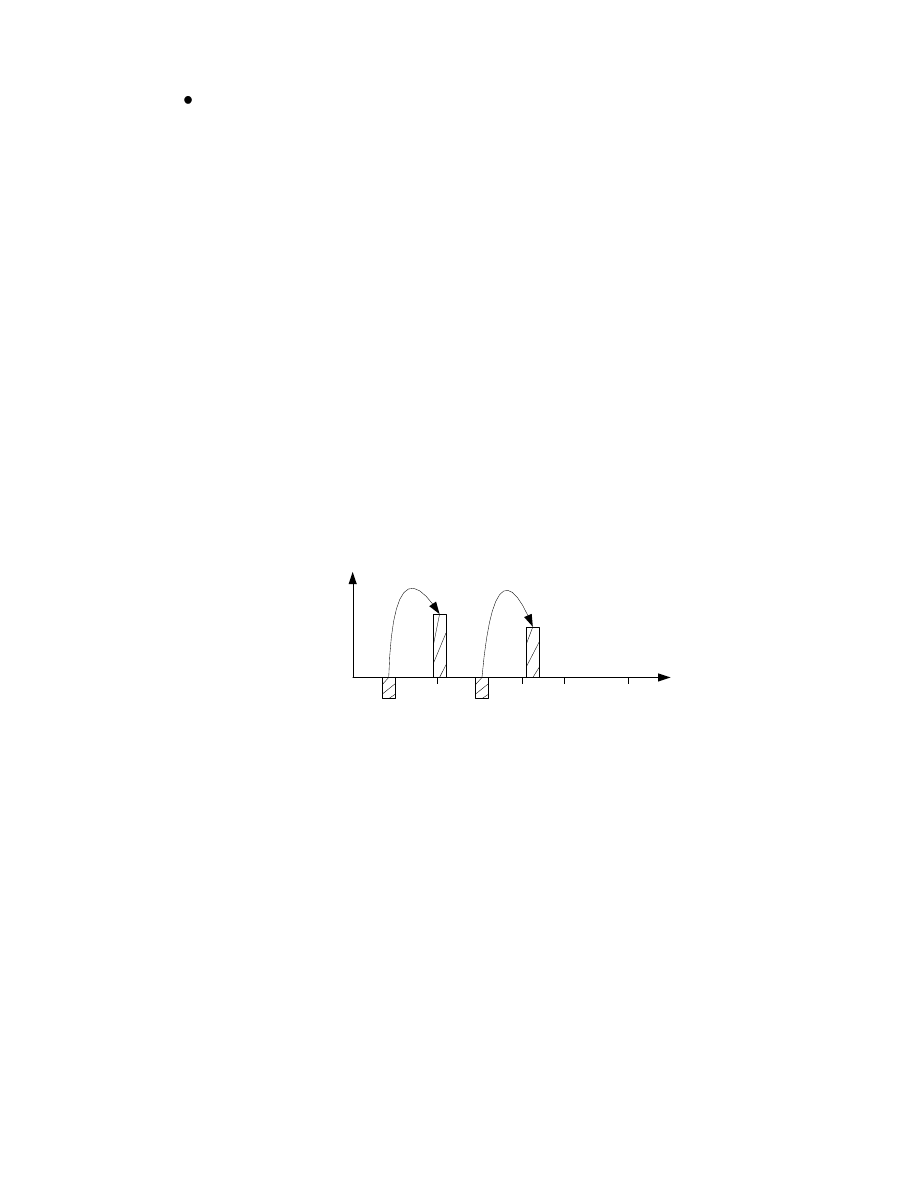
t
П0
П1
П2
П3
П4
Рис.5.
В результате действия алгоритма существует вероятность
накопления суммарной «нехватки времени». В системе могут
накопиться остатки неиспользованного времени.
Динамические алгоритмы планирования предназначены для
изменения последовательности задач во время функционирования
системы. Изменение последовательности задач происходит перед
новым тактом и требует от вычислительного узла дополнительных
ресурсов для пересчета последовательности задач. В отличие от
14
статического планирования, динамическое позволяет адаптировать
систему к текущему состоянию.
Достоинства:
1.
Оптимальное
распределение
временных
участков
подзадач.
2.
Возможность дополнения списка задач в процессе
функционирования системы.
Недостатки:
1.
Сложность реализации алгоритмов.
2.
Повышенные требования к вычислительному узлу.
3.
Предсказуемость системы зависит от алгоритма на каждом
этапе функционирования.
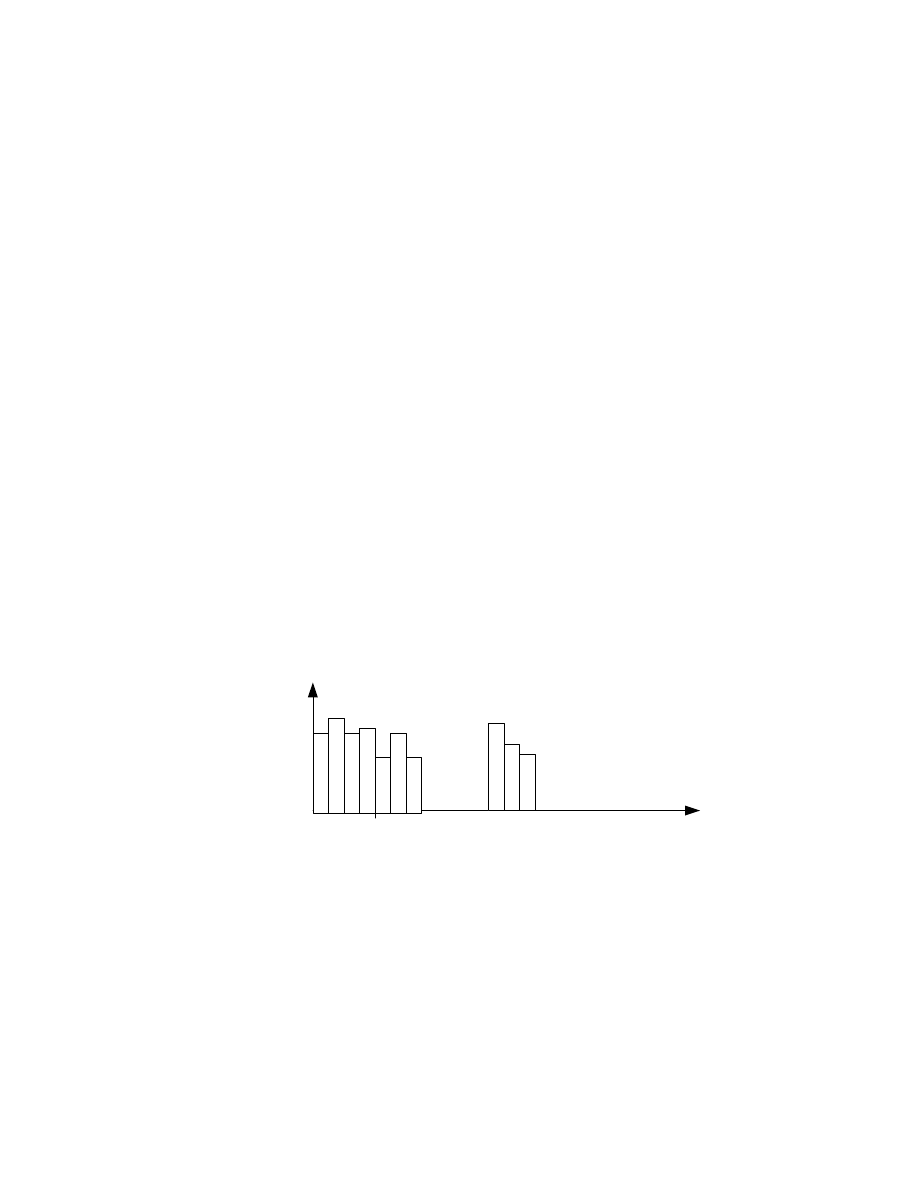
Задачи динамического планирования реализуются в виде
аппендикса. Далее запускается операционная система, потом
периодические, апериодические, спорадические задачи, затем
фоновые задачи.
t
П1
П2
п
а
с
ф
з
д
п
о
с
п
а
с
п
а
с
ф
о
с
о
с
ф
Рис.6.
Существует множество алгоритмов планирования задач.
Рассмотрим 7 алгоритмов.
Планирование периодических задач
15
Планирование периодических задач связано с разработкой
последовательности построения задач, выполняемых на одном
вычислительном узле.
Есть два подхода к построению:
1.
Фиксированный приоритет задач. Приоритет вычисляется
один раз до запуска системы и остаётся неизменным в течение цикла
функционирования задач.
2.
Динамически назначаемый приоритет. Приоритет может
быть установлен во время функционирования задач.
Назначение динамического приоритета производится крайним
сроком исполнения задачи. В связи с этим были разработаны группы
планирования:
1.
Алгоритмы
планирования
задач
с
фиксированным
приоритетом.
2.
Вытесняющие
алгоритмы
планирования
задач
(подразумевает возможность вытеснения одной задачи другой, в
зависимости от приоритета).
Существует три основных алгоритма планирования:
RM
EDF
LSTF
RM
(алгоритм с фиксированным приоритетом)
Приоритет задачи назначается согласно следующему принципу:
чем меньше периодическая задача, тем больше приоритет. Данный
алгоритм всегда формирует оптимальную последовательность задач,
если это возможно.