Файл: Беспилотные летательные аппараты. Технологии. Основные сферы применения бпла.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 24.10.2023
Просмотров: 112
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Привязка требуемой точности достигается измерением координат центров фотографирования с использованием высокоточных GNSS-приемников в пределах референцной сети, или задействованием наземной опорной сети, точки которой привязаны с погрешностью не выше 30 см.
Обработка аэрофотоснимков в ПО Agisoft PhotoScan
Программа Agisoft PhotoScan - универсальный инструмент для генерации трехмерных моделей поверхностей объектов съемки по фотоизображениям этих объектов. PhotoScan с успехом применяется как для построения моделей предметов и объектов разных масштабов – от миниатюрных археологических артефактов до крупных зданий и сооружений, так и для построения моделей местности по данным аэрофотосъемки и генерации матриц высот и ортофотопланов, построенных на основе этих моделей. Обработка данных в PhotoScan предельно автоматизирована – на оператора возложены лишь функции контроля и управления режимами работы программы.
Построение и привязка модели местности в программе состоит из трех основных этапов:
-
построение грубой модели. На этом этапе производится автоматическое определение общих точек на перекрывающихся снимках, восстановление проектирующих лучей, определение координат центров фотографирования и элементов взаимного ориентирования снимков, расчет параметров, описывающих оптическую систему (дисторсия, коэффициент ассиметрии, положение центральной точки). Все эти расчеты выполняются в программе за одну операцию; -
привязка полученной модели к внешней (геодезической, географической) системе координат и уравнивание всех параметров системы – координат центров фотографирования и наземных опорных точек, углов ориентирования снимков, параметров оптической системы с использованием параметрического метода уравнивания. В качестве весовых коэффициентов для уравнивания выступают погрешности определения координат точек съемки (центров фотографирования), определения координат точек наземной опорной сети, дешифрирования и маркирования опорных точек на снимках; -
построение полигональной модели поверхности местности на основе определенных на предыдущем этапе параметров. В программе реализован экспресс-способ, заключающийся в триангуляции только общих точек, полученных на первом этапе, и более точные способы обработки, заключающиеся в определении пространственного положения для каждого пиксела изображения (в зависимости от заданной степени детализации обрабатывается каждый первый, каждый четвертый, каждый шестнадцатый, и т. д. – всего пять возможных уровней).
Затем полученная модель используется для генерации ортофотопланов и матриц высот.
С точки зрения оператора процесс работы с программой выглядит следующим образом:
-
Загрузка фотоснимков -
Выбор системы координат и загрузка данных привязки центров фотографирования -
Формирование точечной модели поверхности Земли -
При наличии наземной опорной сети – установка отметок опорных точек на фотоснимках и загрузка координат точек опорной сети -
Оптимизация модели (уравнивание параметров привязки) -
Генерация полигональной модели поверхности Земли -
Экспорт данных – ортофотоплан, матрица высот
Приведенные скриншоты окна программы наглядно иллюстрируют процесс обработки материалов аэрофотосъемки на примере съемки полигона "Заокский", материалы которой предоставлены ОАО "Газпром космические системы". Обработка данных материалов на ПК, оснащенном 4-хядерным процессором Intel Core i7 2600K и имеющем 16 Гб оперативной памяти, заняла порядка трех-четырех часов – от загрузки фотографий до экспорта ортофотоплана и цифровой модели местности в формате GeoTiff. Из этого времени около одного часа ушло на дешифирование и маркирование опорных точек – ручной труд оператора, а остальное время заняло выполнение расчетов.
Во время работы всегда можно сохранить промежуточные результаты расчетов в файле проекта.
Имеется возможность формирования пакетного задания на обработку. Загрузив исходные снимки, можно сразу указать параметры для каждого из этапов, и программа самостоятельно выполнит весь цикл обработки.
Непосредственно в графическом интерфейсе программы можно производить базовые измерения на полученной модели — измерять расстояния, площадь поверхности и объем модели.
Развитый API позволяет создавать скрипты на языке Python, управляющие обработкой и отображением данных, что позволяет еще более автоматизировать решение типовых задач.
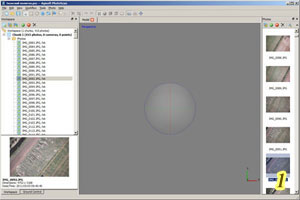
1) Фотографии загружены. В свойствах проекта видно, что проект состоит из блоков (chunks) – обрабатываемых независимо частей проекта со своими фотографиями, моделью, СК, параметрами калибровки оптики и т.п. В данном проекте - один блок, состоящий из 415 фотографий. Метки NA (not aligned) рядом с фотографиями показывают, что положение этих снимков в пространстве модели еще не известно.
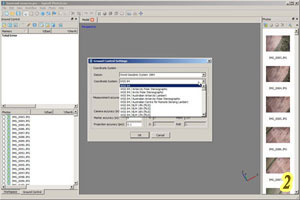
2) Выбор системы координат
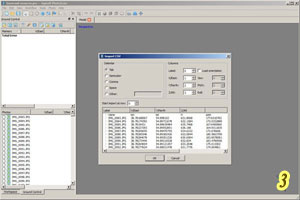
3) Загрузка данных телеметрии – координат центров фотографирования (КЦФ). Программа распознает данные в форматах txt, csv, tel и позволяет указать из каких столбцов считывать данные
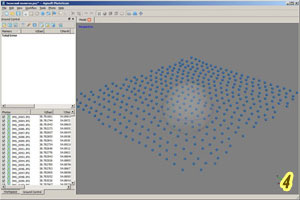
4) Метки в форме синих шариков отображают взаимное расположение точек съемки (КЦФ), после уравнивания они будут заменены метками другого вида, соответствующим положению плоскостей кадров
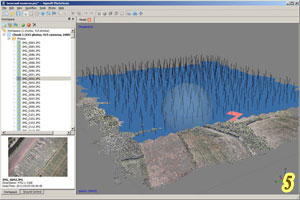
5) После выполнения первого этапа обработки – первичного уравнивания и построения точечной модели, формируется облако точек, описывающее модель, и набор параметров взаимного ориентирования фотоснимков. Положение выбранного снимка отображается в области просмотра модели. Снимки, которые не удалось уравнять, по-прежнему отображаются сферами/шариками, и в списке фотографий отмечены меткой NA (not aligned). В данном проекте таких нет
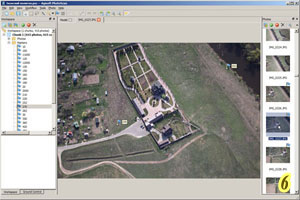
6) Установка маркеров (меток опорных точек). Если известно положение маркеров на снимках (в системе координат снимка), можно просто импортировать эти данные в PhotoScan. Если маркеры еще не дешифрированы, придется задавать их расположение прямо в программе. Для каждого маркера достаточно отметить их положение на одном-двух снимках, и PhotoScan автоматически определяет их положение на других снимках, выделяя снимки, на которых присутствует выбранный маркер, специальными метками. На каждом снимке можно подтвердить итли уточнить автоматически выбранное положение маркера
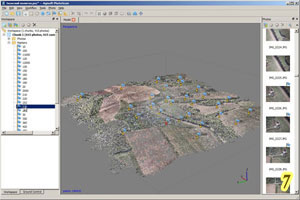
7) Маркеры расставлены. Можно выполнять построение модели местности
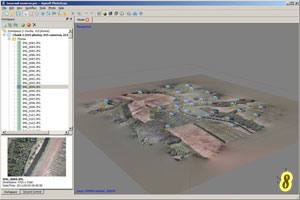
8) Модель готова. Ее можно экспортировать как матрицу высот (цифровую модель местности) и сформировать на основе этой модели ортофотоплан местности.
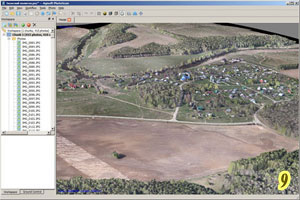
9) В завершение можно построить текстуру модели и рассматривать ее прямо в программе.
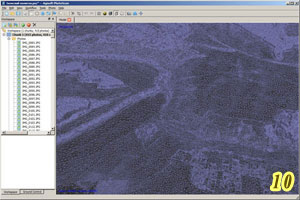
10) Внутреннее представление модели поверхности Землки в PhotoScan - сеть триангуляции Делоне, TIN модель
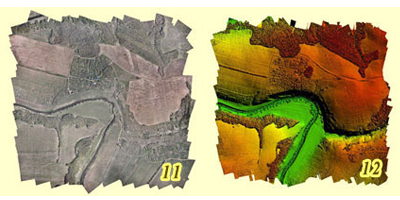
11) Ортофотоплан всего участка съемки.
12) Цифровая модель местности всего участка съемки
Получение карт на основе ортофотопланов в ГИС Панорама
Комплекс автоматизированного дешифрирования и векторизации по данным ДЗЗ, разработанный на базе ГИС "Панорама", предназначен для автоматической векторизации линейных и площадных объектов по цветным растровым изображениям земной поверхности.
Процесс автоматической векторизации состоит из следующих основных этапов:
-
предварительная обработка растра; -
классификация; -
обработка растра классификации; -
преобразование растра в вектор; -
векторная обработка.
Предварительная обработка является необязательным этапом, включает масштабирование и фильтрацию растра. Масштабирование позволяет значительно ускорить обработку при избыточном разрешении снимка. Фильтрация уменьшает шумы изображения, что положительно влияет на результаты распознавания.
Классификация – процесс определения принадлежности отдельных пикселей исходного растра тому или иному распознаваемому объекту. Классификация состоит из трех основных этапов. На первом этапе пользователь определяет обучающие выборки – указывает области на снимке, однозначно принадлежащие распознаваемым объектам. Затем происходит обучение классификатора – процесс выявления и запоминания статистических дешифровочных характеристик, присущих распознаваемым объектам. Эти данные используются собственно в классификации - определения принадлежности отдельных пикселей исходного растра распознаваемому объекту.
Вычисление статистических дешифровочных характеристик при обучении и классификации выполняется для скользящего окна. При обучении окно перемещается в пределах обучающих выборок, при классификации на всем остальном снимке. В качестве статистических дешифровочных характеристик используется спектральные (средний цвет) и текстурные характеристики (контраст, энергия, корреляция).
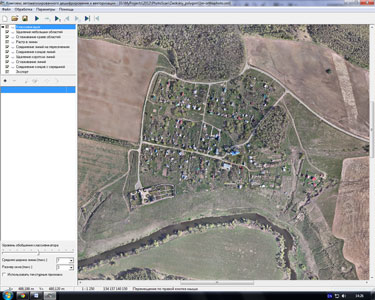
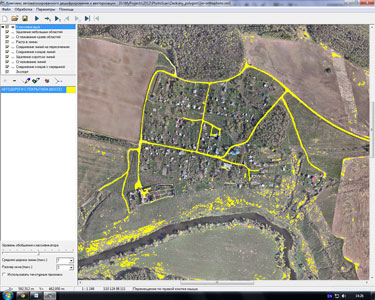
К загруженному ортофотоплану в формате GeoTiff применяется технология классификации и распознования
Результатом классификации является растр классификации – растр принадлежности пикселей исходного растра тому или иному распознаваемому объекту. Растр классификации содержит много шумов – неправильно классифицированных пикселей. Их можно отфильтровать исходя из предположения, что плотность расположения неправильно классифицированных пикселей меньше правильно классифицированных.
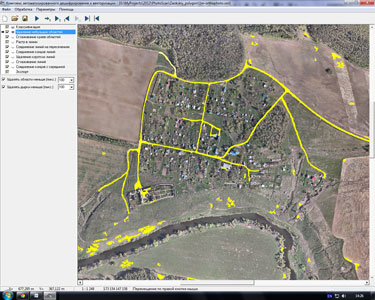
На следующем этапе производиться фильтрация лишней информации, ее сглаживание и перевод с в линейный и площадной вид
Для этого используются морфологические операции - изменение бинарного состояния пикселя на основе анализа состояния его соседей. К таким операциям относятся:
-
эрозия – замена на ноль единичных пикселей, если рядом есть хоть один нулевой пиксель; -
наращивание – замена на единицу нулевого пикселя, если рядом есть хоть один единичный пиксель; -
удаление небольших областей – замена восьмисвязных локальных групп единичных пикселей на нули, если количество пикселей меньше допуска; -
заливка небольших дырок – замена восьмисвязных локальных групп нулевых пикселей на единицы, если количество пикселей меньше допуска;
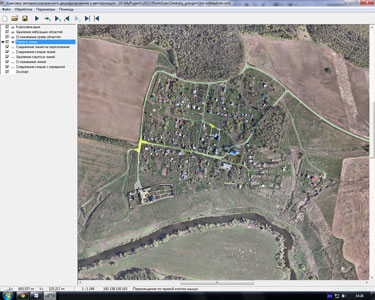
После обработки растр классификации преобразуется в набор векторных объектов – линий или площадей. В процессе преобразования в линии создаются непересекающиеся линейные объекты. При преобразовании в площади создаются площадные объекты, имеющие общие части контура. На окончательном этапе распознанные объекты объединяются или удаляются на основе анализа их взаимного расположения. Объединенная сеть объектов совместно сглаживается и фильтруется перед сохранением в создаваемую карту.
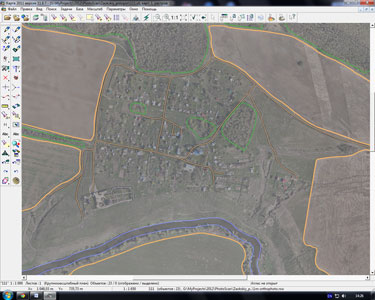
Результат автоматизированного дешифрирования и векторизации ортофотопланов можно посмотреть и отредактировать в ГИС "Панорама"