Файл: Органы управления современными ракетами. Особенности управления плоскокрылыми и крестокрылыми ракетами.docx
Добавлен: 25.10.2023
Просмотров: 201
Скачиваний: 4
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
-
Органы управления современными ракетами. Особенности управления плоскокрылыми и крестокрылыми ракетами.
Для получения требуемой по величине и направлению нормальной силы необходимо регулировать угловое положение ЛА в пространстве. Эта задача решается путем создания управляющих моментов, которые вращают ЛА вокруг трех его осей Ох, Оу и Оz, проходящих через центр масс, с помощью органов управления. Они создают сравнительно небольшие аэродинамические или газодинамические силы, моменты, которые относительно центра масс ЛА, являются достаточными для управления угловыми движениями ЛА.
Поворотные крылья создают одновременно и большую часть нормальной силы и управляющий момент. Сопло располагающееся в центре масс ЛА призвано создавать только нормальную часть управляющей силы.
Управляющие моменты относительно осей Оу и Ох (моменты рыскания и тангажа) могут быть созданы как с помощью аэродинамических, так и реактивных сил. Для создания управляющих моментов с помощью аэродинамических сил используются воздушные рули различных типов или поворотные крылья. Для образования управляющих моментов с помощью реактивных сил применяются газовые рули, поворотные маршевые двигатели, а также специальные рулевые двигатели. На рис.2.3 показана комбинированная схема аэродинамического и газодинамического управления с четырьмя устройствами управления, создающими следующие управляющие моменты:
+ Аэродинамический (создается силой при отклонении аэродинамического руля на угол)
+ Газодинамический (создается силой с помощью газового руля, поворотного сопла и др.).,
и управляющие поперечные силы:
+ аэродинамическая (создается отклонением поворотного крыла на угол)
+ газодинамическая (создается двигателем поперечного управления)
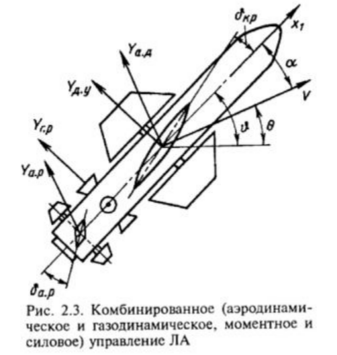
При повороте ЛА на угол атаки (поворот происходит с запаздыванием по отношению к управляющему моменту) возникает управляющая поперечная аэродинамическая сила от конструкции ЛА и газодинамическая от маршевого двигателя.
Плоскокрылые: Если ЛА может создавать нормальную силу лишь в одной продольной плоскости Оху, связанной с ЛА, то для изменения нормальной силы в пространстве ЛА должен быть повернут относительно своей продольной оси Ох. Такой способ управления нормальными силами называют управлением в полярных координатах. Примером управления в полярных координатах может служить ЛА обычной самолетной схемы, т. е. с крыльями, расположенными в одной плоскости. В этом случае для создания нормальной силы различной различных направлениях ЛА должен изменять углы атаки и крена. Т.е. в случае полярного управления проблемно разделение каналов как в асимметрических ЛА.
Крестокрылые: Другой способ получения нормальной силы в любых направлениях состоит в геометрическом сложении нормальных сил, создаваемых в двух взаимно перпендикулярных плоскостях; при этом предварительного накренения ЛА уже не требуется (управление в декартовых координатах). Таким способом, а именно путем сочетания определенных углов атаки и скольжения, создают нормальную силу крылатые ЛА с + и х-образными и кольцевыми крыльями, а также бескрылые ЛА с тягой двигателя, направленной вдоль продольной оси корпуса.
Управление в декартовых координатах может также применяться у ЛА с поперечными двигателями. В данном случае для корректной реализации такой схемы управления, необходима быстрая и точная работа системы стабилизации, для возможности разделения каналов. Так же, например, при наведении по командам сигналы наведения формируются в координатах командного пункта, в таком случае необходимо согласование СК связанных с ЛА.
-
Способы определения параметров движения ракеты в пространстве.
-
Способы определения параметров движения ракеты относительно цели.
1. Автономное наведение
Если положение цели относительно поверхности Земли предполагается известным, то аппаратура наведения, целиком размещенная на борту ЛА, определяет текущее положение и скорость ЛА и в соответствии с этой информацией. Для определения местонахождения и скорости ЛА используют инерциальные навигационные системы, принцип действия которых основан на измерении ускорений и использовании инерционных свойств гироскопов.
Также существуют автономные астронавигационные системы (по
углам двух светил), электро- или магнитометрические системы (по физическим параметрам среды, например, по магнитному полю Земли) и корреляционные системы (сравнение с контуром карты местности).
2. Самонаведение
В системах самонаведения устройства, находящиеся на борту ЛА, получают информацию об относительном движении цели и ЛА непосредственно от цели. Такими устройствами являются головки ГСН.
В зависимости от места расположения первичного источника энергии различают пассивное (энергия излучается целью), активное (цель облучается ракетой) и полуактивное (источник энергии для облучения цели находится не на борту ракеты) наведение.
3. Теленаведение
В системах теленаведения устройства, находящиеся на борту ЛА, получают информацию об относительном движении цели и ЛА с командного пункта, от радиомаяков и т.п. Выделяют два подкласса: командные системы наведения и системы наведения по лучу.
3.1. В командных системах наведения координаты цели определяет координатор цели, расположенный либо на борту ЛА, либо на станции наведения.
3.2. Системы наведения по лучу бывают двух видов: однолучевые и двухлучевые. В однолучевой системе наведения координатор цели (луч) непрерывно следит за целью, а измерительное устройство на борту ЛА определяет его отклонение от оси этого луча. В двухлучевой системе один луч используется для определения координат цели, которые поступают в устройство выработки команд, которое вырабатывает сигналы, управляющие перемещением второго луча, вдоль оси которого движется ЛА.
-
Обеспечение устойчивости и управляемости ракеты при наведении.
-
Методы стабилизации ракеты в полете
Система стабилизации – это совокупность устройств, расположенных на ЛА для обеспечения сохранения требуемого углового положения данного ЛА.
Задачи, решаемые системой стабилизации:
· Исправление и улучшение динамических характеристик ракеты;
· Подавление внешних возмущающих воздействий;
· Контроль перегрузок, оказываемых на ракету.
При этом для исправления динамических характеристик ЛА система стабилизации должна удовлетворять следующим требованиям:
· Свободные колебания системы стабилизации должны быть задемпфированы. Коэффициент демпфирования в данном случае выбирается так, чтобы запасы устойчивости по амплитуде и фазе, а также перерегулирование переходной характеристики лежали в некотором заданном диапазоне.
· Динамические характеристики самой системы стабилизации должны в минимальной степени зависеть от режима полета, чтобы не оказывать дополнительного воздействия.
· Система стабилизации должна иметь ширину полосы пропускаемых частот не меньше некоторой заданной.
Рассмотрим методы стабилизации на примере стабилизации угла крена.
1. Стабилизация с ОС.
Для стабилизации угла крена, требуется измерять отклонение фактического угла крена от заданного, для чего необходим свободный гироскоп.
С помощью свободного гироскопа, измеряющего ошибку стабилизации (разность между заданным и действительным углом крена), ЛА охватывается ОС по углу крена. Сигнал ошибки поступает в рулевой привод, который отклоняет органы управления креном таким образом, чтобы создать момент, направленный на уменьшение ошибки.
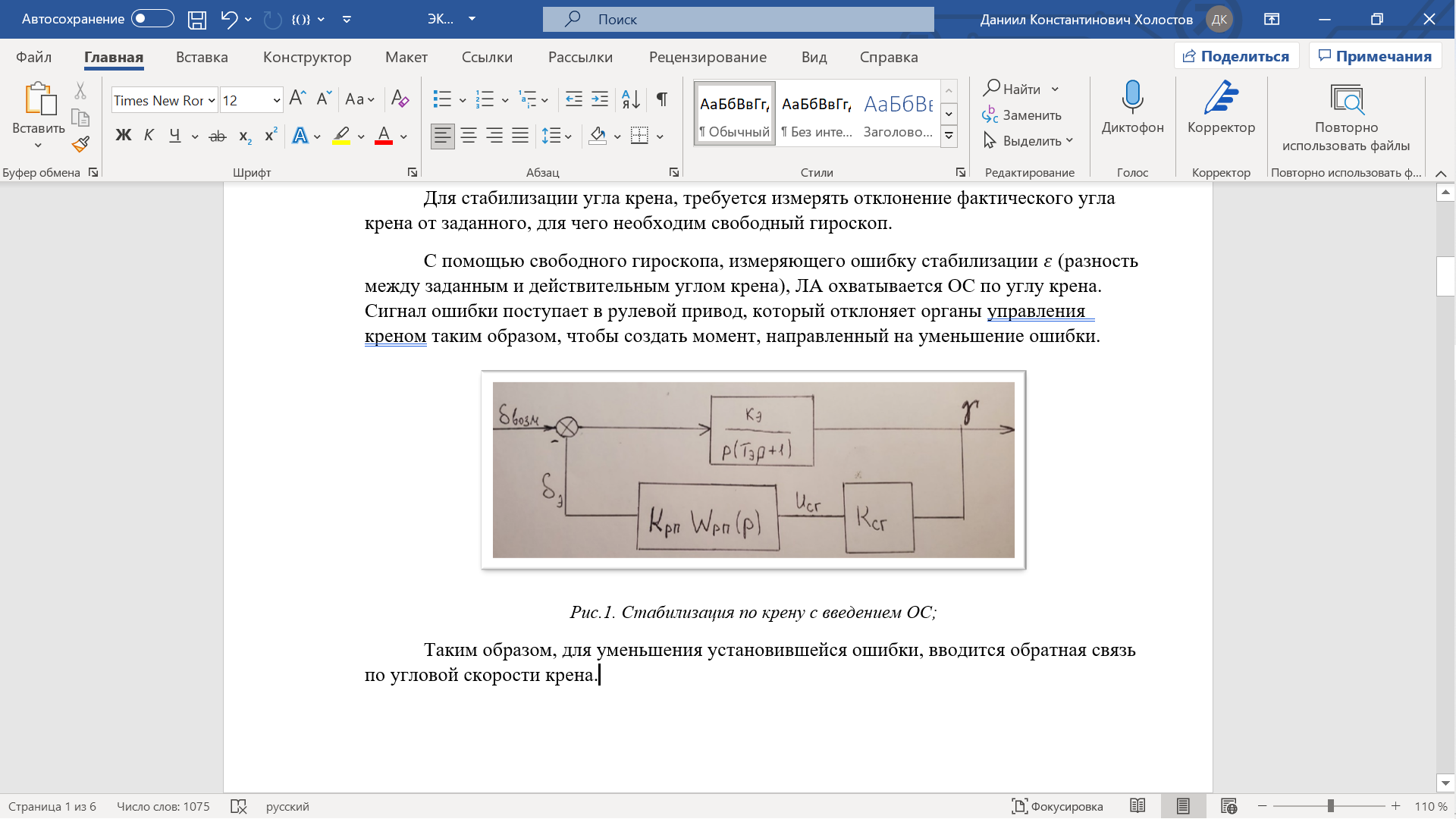
Таким образом, для уменьшения установившейся ошибки, вводится обратная связь по угловой скорости крена.
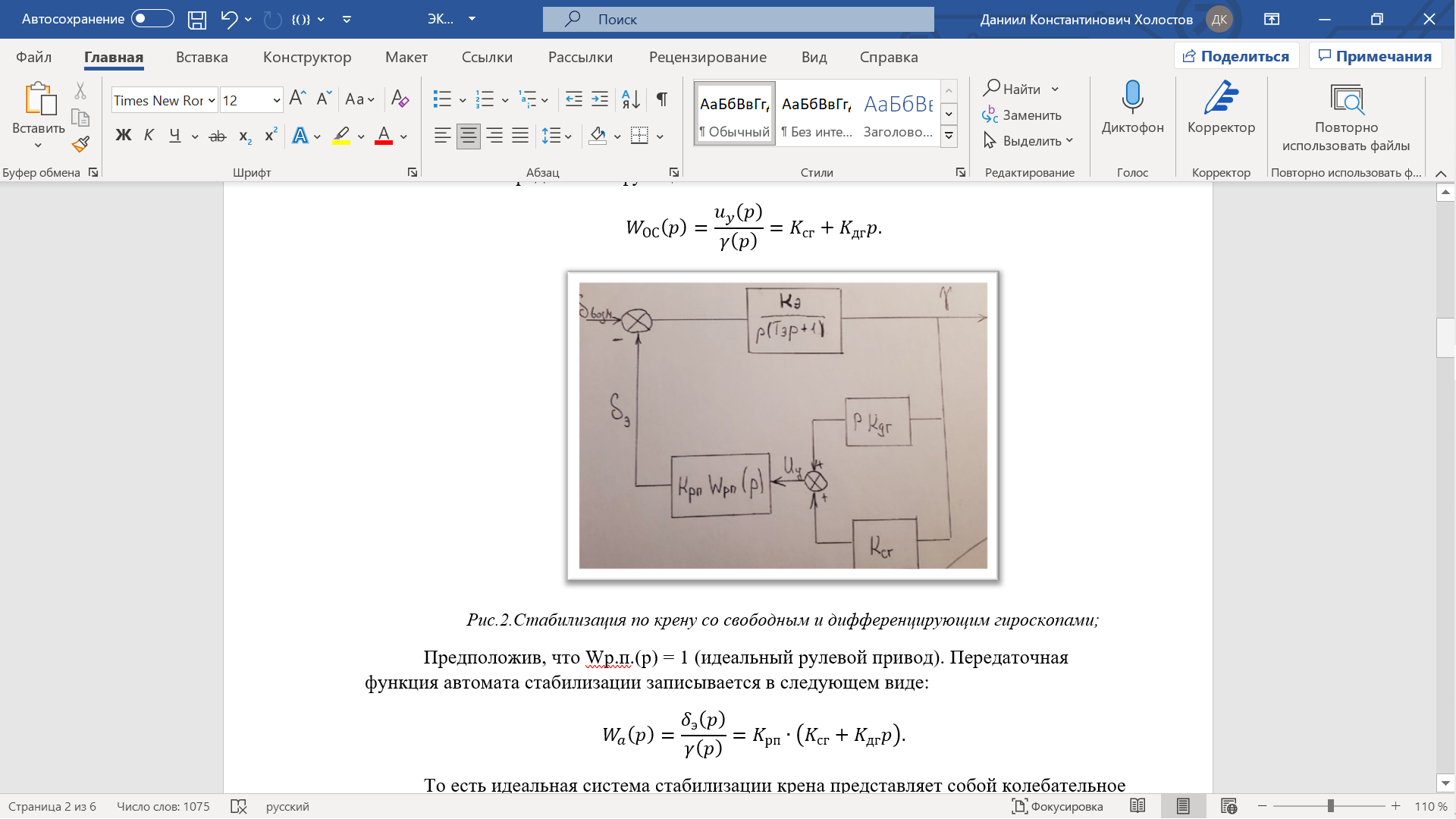
2. Статические системы стабилизации.
Основное назначение ОС по угловой скорости состоит в обеспечении демпфирования, которое может быть достигнуто различными способами, в том числе измерением угловой скорости крена с помощью дифференцирующего гироскопа или дифференцированием сигнала со свободного гироскопа с помощью — RC-фильтра.
Рассмотрим первый случай, при котором сигнал управления формируется в соответствии с передаточной функцией:
3. Астатические системы стабилизации.
В тех случаях, когда к точности стабилизации угла крена предъявляются повышенные требования, для устранения установившихся ошибок применяются астатические системы стабилизации. При этом интегрирование может осуществляться путем использования рулевого привода с изодромной ОС в системе стабилизации со свободным и дифференцирующим гироскопами.
Также есть второй вариант астатической системы стабилизации крена, который состоит в комбинации свободного гироскопа с интегрирующим при рулевом приводе с жесткой ОС. В данном случае для введения интегрирования электрический сигнал свободного гироскопа должен подаваться на моментный датчик интегрирующего гироскопа.
Стабилизация ракет в полете
Чтобы ракета летела устойчиво, применяют различные виды стабилизации, т. е. возвращения ее на расчетную траекторию или траекторию, достаточно близкую к расчетной, и удержания на траектории.
Существуют следующие способы стабилизации ракет в полете: вращением ракеты вокруг продольной оси, при помощи оперения - стабилизаторов и при помощи рулей.
Первые два способа применяются для стабилизации неуправляемых ракет, третий - для стабилизации управляемых.
Первый способ основан на использовании свойств гироскопа сохранять неизменным положение своей оси в пространстве при быстром вращении. Некоторым ракетам, как и артиллерийским снарядам, для устойчивости в полете также сообщается вращательное движение. Но здесь есть ограничения.
Во-первых, корпус ракеты обычно слабее
, чем корпус артиллерийского снаряда, и при быстром вращении может разрушиться.
Во-вторых, ракеты бывают очень крупные, и Для их вращения требуется большое количество энергии, затрачиваемой реактивным двигателем, что уменьшает дальпость полета ракеты.
Поэтому стабилизация вращением применяется главным образом для неуправляемых ракет небольших размеров и имеющих небольшие дальности полета.
Вращательное движение придается при помощи направляющих, наклонных стабилизаторов, косо поставленных сопел и другими способами. Может быть использована и комбинация нескольких способов. Вращение ракеты при движении по наклонным направляющим происходит аналогично вращению артиллерийского снаряда в стволе орудия.
При наклонных стабилизатора вращательное дви-женне ракете придает набегающий на стабилизаторы ВоЗДУх.
При косо направленных соплах вращательное дви-жение ракеты совершается за счет реактивной струн га-зов, вытекающих из сопел.
Косо направленные сопла использовались, например, в реактивных минах шестиствольного немецкого миноме-та, применявшегося во время второй мировой войны.
Скорость вращения ракеты зависит от угла наклона направляющих, от угла наклона стабилизаторов и угла косо направленных сопел по отношению к продольной оси ракеты.
Стабилизация ракет при помощи оперения может применяться для ракет любых размеров. При этом роль ста-билизатора играет хвостовое оперение. Если бы у невра-щающейся ракеты не было специальных устройств, стабилизирующих ее в полете, ракета под действием, напри-мер, ветра могла перевернуться или повернуться вокруг своей продольной оси, в результате чего нарушился бы ее правильный полет.
Хвостовое оперение стабилизирует ракету по углу тангажа и углу рыскания.
Для стабилизации ракеты по углу крена служит спе-циальное устройство, состоящее из элеронов и гироскопа.
Гироскоп реагирует на крен ракеты. При появлении угла крена он регистрирует величину этого угла и через особые устройства передает ее на две управляющие аэро-динамические поверхности - элероны, отклоняющиеся в различных направлениях.
Подъемные силы элеронов направлены в противоположные стороны. Потому один элерон увеличивает подъемную силу крыла, а другой-уменьшает. За счет неравенства подъемных сил крыльев создается крутящий момент, который и поворачивает ракету в нужном направлении.
Иногда для повышения кучности оперенных ракет применяется проворачивание -- медленное вращение ракеты вокруг продольной оси на траектории со скоростью от единиц до нескольких десятков или сотен оборотов в минуту. Проворачивание ракет осуществляется теми же способами, что и вращение.