Файл: Органы управления современными ракетами. Особенности управления плоскокрылыми и крестокрылыми ракетами.docx
Добавлен: 25.10.2023
Просмотров: 204
Скачиваний: 4
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
-
Управление угловым движением ракеты.
На ЛА в полете в общем случае действуют силы тяги двигателей, аэродинамические силы и сила веса. Чтобы воздействовать на траекторию полета ЛА нужно менять величину и равнодействующую этих сил. Управление полетом практически выполняется путем изменения величины и направления равнодействующей сил тяги двигателей и аэродинамических сил. Ее называют управляющей силой. Эту силу можно разложить на тангенциальную и нормальную. Чтобы изменять направление полета, необходимо приложить к ЛА нормальную управляющую силу.
Для получения требуемой по величине и направлению нормальной силы необходимо регулировать угловое положение ЛА в пространстве. Это делается путем создания управляющих моментов, которые вращают ЛА вокруг трех его осей Ох, Оу и Оz, проходящих через центр масс. Для создания управляющих моментов служат органы управления. Они создают сравнительно небольшие аэродинамические или газодинамические силы, моменты которых относительно центра масс ЛА являются достаточными для управления угловыми движениями ЛА. Обычно эти силы слабо влияют на нормальную силу ЛА.
Исключение составляют лишь поворотные крылья или сопло в цм, которые создают одновременно и большую часть нормальной силы и управляющий момент.
Управляющие моменты относительно осей Оу и Оz (моменты рыскания и тангажа) могут быть созданы как с помощью аэродинамических, так и реактивных сил. Для создания управляющих моментов с помощью аэродинамических сил используются воздушные рули различных типов, поворотные крылья и интерцепторы. Для образования управляющих моментов с помощью реактивных сил применяются газовые рули, поворотные маршевые двигатели, а также специальные рулевые двигатели. При наличии нескольких маршевых двигателей или нескольких сопел у одного маршевого двигателя, необходимые управляющие моменты можно получить путем изменения сил тяги у соответствующих сопел. Управляющий момент крена (относительно оси Ох) может быть создан элеронами, воздушными и газовыми рулями, а также поворотными крыльями с дифференциальным управлением, интерцепторами, рулевыми ракетными двигателями.
-
Способы управления траекторным движением ракеты
Для того чтобы воздействовать на траекторию полета летательного аппарата (ЛА), требуется изменять величину и направление равнодействующей сил, действующих на ЛА: силы тяги ДУ, аэродинамической силы и веса. Это может осуществляться с помощью изменения равнодействующей силы тяги и аэродинамической силы, которую принято называть управляющей силой. Управляющую силу можно разложить на две составляющие:
1) тангенциальную, направленную вдоль вектора скорости полета;
2) нормальную, перпендикулярную этому вектору.
Для воздействия на скорость полета нужно изменять тангенциальную составляющую за счет изменения тяги двигателей или лобового сопротивления.
Для изменения направления полета требуется приложить к ЛА нормальную управляющую силу.
При управлении движением автоматических маневренных ЛА скорость, как правило, не регулируют, а изменение нормальной управляющей силы осуществляют с помощью системы управления нормальными перегрузками ЛА. Принципиальная схема системы управления нормальными перегрузками во многом определяется способом создания нормальной силы. Если полет ЛА происходит в достаточно плотных слоях атмосферы, основную роль в образовании нормальной силы может играть аэродинамическая подъемная сила. Чтобы получить аэродинамическую нормальную силу требуемой величины, необходимо изменить угол атаки, повернув ЛА относительно центра масс.
Аэродинамические и газодинамические органы управления
Газодинамический пояс
Для некоторых типов ракет маневренность — критически важный показатель. Аэродинамические рули не могут одинаково хорошо работать на малой высоте и на большой. Что касается отклонения вектора тяги, то он тоже не гарантирует «быстрой реакции», та как сопло двигателя находится далеко от центра масс. Но решение есть.
Как работает газодинамический пояс. Сотни маленьких сопел на ракете — двигатели поперечного управления. Или так называемых газодинамический пояс, способный очень быстро разворачивать ракету почти на месте и не созидающий аэродинамического сопротивления, пока это не станет действительно нужно.
Располагаются двигатели практически в центре масс корпуса (там где он будет когда ракета выработает большую часть топлива) и включаются на конечном участке траектории, чтобы наверняка поразить цель.
А что если убрать рули вовсе? Сопротивление уменьшится, но управление потеряем. Как в таком случае маневрировать?
Есть решение — управлять не «вредными» аэродинамическими поверхностями, а непосредственно тягой (струей газа из сопла). Можно поворачивать сопло, а то и всю камеру сгорания механически (что сложно и дорого, но это самый распространенный способ), можно использовать специальные жаропрочные плоскости-дефлекторы или вовсе добавить в конструкцию дополнительные двигатели.
Альтернативой управления вектором тяги за счет манипуляций с геометрией сопла служит отклонение струи за счет размещения в сверхзвуковой части сопла отклоняющих поверхностей (газовых рулей).
-
Координаторы цели. Принципы их действия, возможности и динамические свойства.
Координаторы цели (Основной измеритель в системе самонаведения) – головки самонаведения (ГСН) – предназначены для определения положения цели относительно ЛА и выработки необходимых сигналов управления. ГСН могут работать только при наличии контраста цели с окружающей ее средой и подразделяются на радиолокационные, инфракрасные, оптические, лазерные и акустические.
Как отмечалось ранее основное применение оптических координаторов цели – это элементы головки самонаведения и стационарных локационных систем. В рамках каждой из перечисленных систем возможно различия по принципу построения системы (активные, полуактивные и пассивные системы), используемой элементной базе (радиолокационные, оптические, акустические).
Применяемые в головках самонаведения системы удобно разделить на три группы по принципу построения [1]: • Пассивные • Активные • Полуактивные
Пассивные системы самонаведения При пассивном самонаведении координатор цели принимает излучение от цели. Наведение координатора прибора самонаведения на цель осуществляется его автономной следящей системой. Основные преимущества данного способа заключаются в скрытности действия и полной автономности ракеты от летательного аппарата, с которого она была запущена. В координаторах данного типа реализован принцип «выстрелил-забыл».
В системе активного самонаведения на снаряде устанавливается не только приемник излучения, но и генератор излучения, используемый для подсветки цели. Таким образом, приемник излучения работает с сигналом, отраженным от цели.
В системе полуактивного самонаведения генератор излучения устанавливают на наземном пункте или самолете-носителе, а координатор цели находится в приборе самонаведения снаряда. Схема полуактивного самонаведения снаряда класса «воздух—воздух» включает цель, снаряд и самолет. Система полуактивного самонаведения не является автономной и связывает свободу маневра самолета-носителя после запуска снаряда до его встречи с целью. Это является основным недостатком метода. Аппаратура и порядок предварительного наведения снаряда и координатора цели прибора самонаведения в этом случае подобны рассмотренным выше. Основным преимуществом полуактивной системы самонаведения является возможность применения более мощного и крупногабаритного источника излучения.
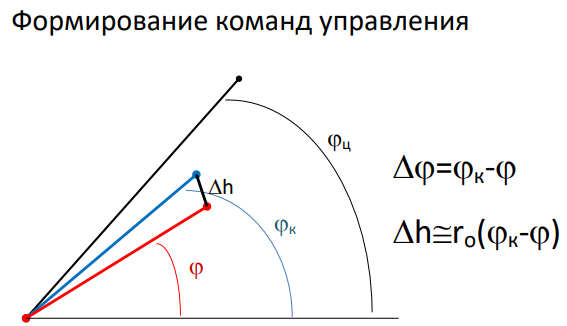
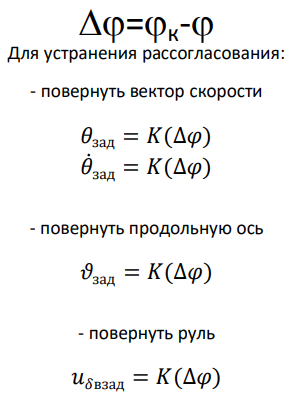
координатор цели, который под воздействием отраженной от цели или излученной ею энергии определяет угловое положение ракеты относительно цели. На основании этой информации координатор цели вырабатывает сигналы управления. Эти сигналы воздействуют на органы управления так, чтобы свести отклонения ракеты от предписанной ей методом наведения траектории к нулю и вывести ракету в район цели
Для наведения ракеты на выбранную цель необходимо постоянно следить за целью, т. е. сопровождать цель. Перед сопровождением нужно найти цель, а затем захватить ее по угловым координатам и дальности. Для этого координатор цели сначала работает в режиме поиска по угловым координатам.
Головка самонаведения обеспечивает получение сведений о цели, необходимых для наведения ракеты на цель. Основным элементом тепловой головки самонаведения является координатор цели, который, как и радиолокационные координаторы, измеряет угол рассогласования, т. е. угол между оптической осью координатора и направлением на цель.
Работа радиолокационного координатора цели основана на свойствах цели излучать или отражать радиоволны. Таким образом, радиолокационные координаторы цели могут быть пассивными, активными или полуактивными.
https://mash-xxl.info/page/239029048055006190126214069185051142144062006156/
-
Тепловые головки самонаведения. Принципы действия и схемы построения.
Тепловая головка самонаведения - — головка, работающая на принципе улавливания волн инфракарсного диапазона, излучаемых захватываемой целью. Представляет собой оптико-электронный, предназначенный для идентификации цели на окружающем фоне и выдачи в автоматическое прицельное устройство (АПУ) сигнала захвата, а также для измерения и выдачи в автопилот сигнала угловой скорости линии визирования.
Оптическая система, представляющая собой зеркально-линзовый объектив, установленный на роторе гироскопа и вращающийся вместе с ним, собирает тепловую энергию, излучаемую целью, в фокальную плоскость объектива, где расположен модулирующий диск.
ТГС состоит из координатора и электронного блока. Координатор представляет собой оптико-гироскопический узел, включающий свободный гироскоп с зеркально-линзовым объективом, статорную систему и фотоприемник.
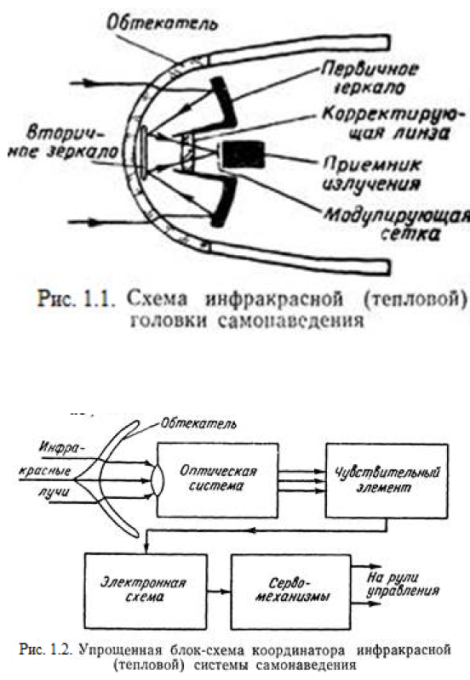
Принцип построения пассивной инфракрасной головки самонаведения показан на рис. 1.2. Поступающие от цели, а также отраженные и собственные излучения фона собираются оптической системой и фокусируются на поверхности чувствительного элемента. Информация о цели от чувствительного элемента в виде электрического сигнала поступает в электронную схему (усилитель и блок выделения команды). Конечным звеном схемы являются сервомеханизмы, связанные с рулями управления. Элементы схемы от входной оптики до электронной схемы называют тепловым координатором цели.
Угол визирования ФИ говорит об угловой скорости (Не показано, что является информацией о положении цели)
10. Радиолокационные головки самонаведения. Принципы действия и схемы построения.
Радиолокационная головка самонаведения, содержащая антенну, передатчик, приемное устройство (ПРМУ), циркулятор, датчик углового положения антенны в горизонтальной плоскости (ДУПАгп) и датчик углового положения антенны в вертикальной плоскости (ДУПАвп),
Активная радиолокационная система самонаведения
Самонаведение ракеты с помощью активной радиолокационной системы самонаведения возможно благодаря тому, что цель иначе, чем окружающий ее фон, отражает радиоволны. Для выявления этого эффекта источник радиоволн, установленный на ракете, облучает цель так же, как и обычный радиолокатор. Отраженные от цели сигналы содержат сведения? о положении и о параметрах движения цели. Эти сигналы принимаются приемным устройством ракеты, усиливаются, преобразуются и после разложения по двум каналам управления подаются на вход автоматического устройства наведения ракеты.
Комплекс аппаратуры, включающий приемно-передающую антенну, передатчик, приемник, преобразовательные и вычислительные блоки, называют радиолокационным координатором. Координатор непрерывно и автоматически определяет направление на цель и параметры ее движения.
Блок-схема координатора (рис. 11) не отличается от типичной блок-схемы радиолокационной станции. Однако имеются особенности. Координаторы обычно компактны, потребляют небольшую электрическую мощность. Все элементы координатора