Файл: Органы управления современными ракетами. Особенности управления плоскокрылыми и крестокрылыми ракетами.docx
Добавлен: 25.10.2023
Просмотров: 203
Скачиваний: 4
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
размещаются, как правило, в носовой части ракеты, а антенна закрыта прозрачным для радиоволн обтекателем.
Обтекатель должен выдерживать значительные аэродинамические нагрузки и высокую температуру, возникавшую вследствие трения ракеты о воздух при сверхзвуковых скоростях полета.

Применяются в ракетах классов «воздух-воздух», «земля-воздух», противокорабельных.
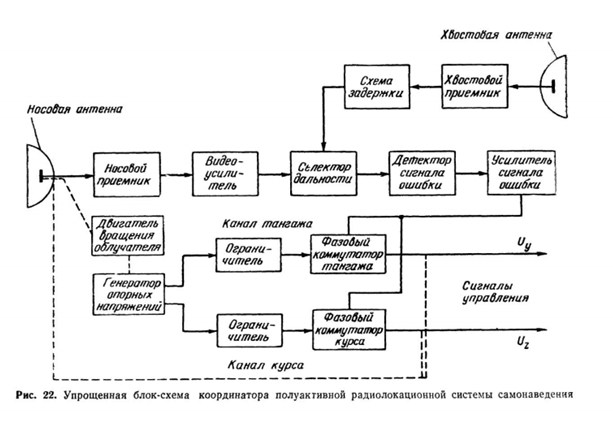
Полуактивная радиолокационная система самонаведения
Бортовое оборудование ракеты с такой системой самонаведения состоит из полуактивного радиолокационного координатора цели и хвостового приемника. Полуактивный радиолокационный координатор цели по конструкции сходен с активным. Различие состоит лишь в том, что в нем нет передатчика, облучающего цель. Радиолокационный передатчик для облучения цели размещается на самолете-носителе, на земле или на корабле, «подсвечивая» цель, а также передавая на ракету синхронизующие сигналы.
Для надежного наведения ракеты на цель необходимо, чтобы цель непрерывно облучалась электромагнитной энергией, т. е. чтобы антенна радиолокационного передатчика была постоянно направлена на цель, а в случае подвижной цели автоматически сопровождала ее. Для этого применяют радиолокатор с автоматическим сопровождением цели.
Блок-схема полуактивного радиолокационного координатора приведена на рис. 22.
Полуактивный радиолокационный координатор по сравнению с активным имеет существенный недостаток — невозможность селектировать и сопровождать цель по дальности. Это может привести к тому, что бортовой координатор при появлении в поле зрения его антенны другой цели может самопроизвольно изменить объект атаки. Для того чтобы этого не произошло, в хвостовой части ракеты дополнительно устанавливают вспомогательный приемник, предназначенный для приема сигналов от радиолокационной станции подсвета. Это позволяет синхронизировать работу полуактивного координатора с радиолокационной станцией подсвета так, чтобы на ракете, кроме угловых координат цели, можно было изменять дальность до цели или скорость изменения дальности.
Применяются в ракетах классов «воздух-воздух», «земля-воздух»
Пассивная радиолокационная система самонаведения
По схеме построения схожа с полуактивной радиолокационной системой самонаведения. Наводится на излучение цели (РЛС противника). Применяется в противолокационных ракетах
Характер получения информации о цели при активном самонаведении
. Характер получения информации о цели при полуактивном самонаведении
Характер получения информации о цели при пассивном самонаведении.
-
Общая характеристика существующих методов наведения.
Все существующие методы наведения можно разделить следующим образом:
-
автономные системы; -
системы теленаведения; -
системы самонаведения; -
комбинированные системы.
Автономные системы наведения в процессе полёта ЛА не получают никакой информации ни от цели, ни от командного пункта, ни от какого-либо другого искусственного источника информации, например, от радиомаяка. Аппаратура наведения, целиком размещённая на борту ЛА, определяет его местонахождение относительно земной поверхности, вычисляет отклонения от заданной траектории полёта и в соответствии с этими отклонениями вырабатывает сигналы наведения. С математической точки зрения наведение в автономных системах очень похоже на решение краевой задачи, только при наличии неконтролируемых возмущений.
Для определения координат центра масс ЛА используются инерциальная навигационная система, основанная на измерении ускорений при помощи акселерометров и использовании инерционных свойств гироскопов. ИНС можно разделить на два класса: платформенные и бесплатформенные (БИНС). Наличие интегрирования в ИНС подчёркивает ошибки, имеющие ненулевую среднюю составляющую (т.н. дрейфы). Эти системы работают на частотах примерно до кГц-диапазона, т.к. на более высоких частотах присутствует больше случайных ошибок – шумов.
Для коррекции ИНС используют спутниковую навигационную систему (СНС), наземные станции (маяки), пассивные ориентиры, магнитометрические способы, астронавигацию, корреляционно-экстремальные навигационные системы (обрабатывающие изображения, полученные в различных диапазонах, необязательно только в видимом спектре), высотомеры.
В системах теленаведения бортовые устройства получают информацию от источника, находящегося вне ЛА: с командного пункта (станции наведения (СН)), радиомаяков и т.п. Основным достоинством систем теленаведения является возможность использования более достоверной информации о цели. Основной недостаток – СН вынуждена сопровождать ОУ на всём участке теленаведения.
Системы теленаведения можно разбить на два подкласса:
-
лучевые системы теленаведения; -
командные системы наведения.
При лучевом управлении со СН в каждый момент времени задаётся положение луча, в котором должен находится ОУ. Задача нахождения в этом луче решается на самом ОУ.
В командных системах наведения на ОУ подаются команды управления, рассчитанные на СН и обеспечивающие его движение по траектории наведения.
Стоит отметить, что в системах теленаведения информация о цели может получаться как на СН, так и на борту ЛА с последующей передачей на СН. При этом сигнал наведения вырабатывается только на СН.
В системах самонаведения устройства, находящиеся на борту ЛА, получают информацию о цели непосредственно от цели при помощи координатора цели (КЦ), и содержат устройства выработки команд. По принципу работы КЦ различают на пассивные (используют излучение от цели, для чего чувствительные элементы КЦ должны обладать высокой чувствительностью, а цель должна контрастировать), полуактивные (осуществляется подсвет цели с носителя или какого-либо другого объекта) и активные (подсвет цели осуществляет сама ГСН).
Блок-схема системы самонаведения:
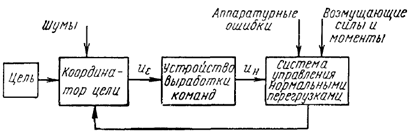
Для получения сигнала ошибки
 КЦ определяет положение цели относительно системы осей, связанных с КЦ и ориентированных в пространстве определённым образом в зависимости от принятого метода наведения. Далее вырабатывается сигнал наведения
КЦ определяет положение цели относительно системы осей, связанных с КЦ и ориентированных в пространстве определённым образом в зависимости от принятого метода наведения. Далее вырабатывается сигнал наведения  , поступающий, например, в систему управления нормальными перегрузками, в результате действия которых изменяется направление вектора скорости полёта ЛА и, следовательно, положения цели относительно осей, связанных с КЦ.
, поступающий, например, в систему управления нормальными перегрузками, в результате действия которых изменяется направление вектора скорости полёта ЛА и, следовательно, положения цели относительно осей, связанных с КЦ.Системы самонаведения используют следующие методы наведения: метод прямого наведения, метод погони, методы наведения с постоянным углом упреждения, метод пропорционального сближения и метод параллельного сближения.
Комбинированные системы наведения применяют, чтобы удовлетворить сложным тактико-техническим требованиям и использовать преимущества и сгладить недостатки различных методов наведения. Например, часто используется следующий вариант комбинации систем наведения:
-
автономное наведение на начальном участке траектории при большой дальности до цели и незначительных требований к точности; -
наведение по командам или по лучу на среднем участке для повышения точности и учёта движения цели;
самонаведение на конечном участке.
-
Автономное наведение, его ограничения и возможности совершенствования.
Автономное наведение является одной из трех видов задач наведения, классифицируемых по способу получения и использования информации о цели.
При автономном наведении предполагается, что информация о цели не меняется, более того, она заносится в систему управления ЛА перед его стартом, а затем ЛА осуществляет полет в заданную точку на основе этой информации, используя бортовые навигационные средства, а именно:
- инерциальные навигационные системы (платформенные, бесплатформенные), используется информация от акселерометров и через двойное интегрирование получаются текущие координаты, также используются ДУСы;
- также к автономным навигационным средствам относятся астронавигационные системы;
- навигация по результатам обработки изображений (контрастные точки, фотометрия).
Сама задача автономного наведения с математической точки зрения – краевая задача, однако техническая задача отличается наличием неконтролируемых возмущений, которые искажают программную траекторию. Поэтому в автономном методе наведения программная траектория может служить опорой для решения задачи наведения. Возмущения надо либо предвидеть или измерять, в САР это возможно, а в системах наведения как правило нет. В целом задача состоит в переводе объекта в другую точку с равновесными параметрами (линейные/угловые скорости), но таких положения (аттракторов) может быть несколько. Здесь присутствуют сложности аналитических вычислений, т.е. оптимальные траектории могут не являться притягивающими. Это может корректироваться ПКЗУ, но для этого необходимы вычислительные мощности.
Второе решение задач автономного управления – по принципу обратной связи, не строя программную траекторию, а делая конечную точку притягивающей. Но здесь нет общих методов решения,
можно разбивать траекторию на участки, да и при делении на каналы управления можно не учесть аттракторы в других каналах (закритические углы атаки, боковое сваливание).
Автономное наведение используется как для баллистических ракет, так и для крылатых ракет.
Если расположить датчики по мере уменьшения точности, то это будут MEMS, оптоволоконные, лазерные и гироскопические на последнем месте, а так как основным средством получения информации о собственном положении является ИНС (для крылатых ракет точности могут быть ниже, чем для БР, используется БИНС), то это и является основным недостатком и ограничением таких систем, они требуют коррекции извне для большого времени полета, например с помощью СНС. Для БР применяется также астрокоррекция и коррекция по наземным объектам (магнетометры на таких режимах не используют), а для крылатых ракет при полете на небольшой высоте – барометрические, магнитометрические, радиометрические методы, метод КЭНС, обработка изображений в различных диапазонах (оптический, инфракрасный, радио-) – полученное изображение сравнивается с эталоном и применяется для коррекции КЭНС и ИНС.
Автономное наведение также неприменимо для случая подвижной цели, поэтому на конечном этапе наведения используют неавтономные методы.
Совершенствование систем возможно через улучшение характеристик бортовых вычислительных и измерительных систем.
-
Динамика систем автономного наведения
Системы автономного наведения отличаются тем, что координаты цели определяются заранее и в процессе наведения для компенсации начальных ошибок и текущих возмущений используются только измерения абсолютных координат ракеты
Принципы автономного наведения применяются в баллистических и крылатых ракетах, предназначенных для поражения заранее выбранных целей. Здесь для измерения координат ракеты применяются инерциальные системы, корректируемые в случае больших дальности и времени полѐта измерениями скорости с помощью доплеровского измерителя или линейных координат сопоставлением, например, высоты полѐта с картой местности