Файл: Исследование рычажного механизма 5 2 Кинетостатический (силовой) анализ рычажного механизма 16.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 26.10.2023
Просмотров: 103
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Содержание
Введение 3
1. Кинематическое исследование рычажного механизма 5
2 Кинетостатический (силовой) анализ рычажного механизма 16
Заключение 22
Список литературы 23
Введение
Рационально спроектированная машина должна удовлетворять социальным требованиям безопасности обслуживающего персонала, а также эксплутационным, экономическим, технологическим и производственным требованиям.
Проект содержит задачи по исследованию и проектированию машин, состоящих из сложных и простых в структурном отношении механизмов(шарнирно-рычажных, кулачковых, зубчатых, и др.).
Курсовое проектирование способствует закреплению, углублению и обобщению теоретических данных, а также применению этих знаний к комплексному решению конкретной инженерной задачи по исследованию и расчёту механизмов и машин, кроме того прививает некоторые навыки научно-исследовательской работы.
В состав большинства проектных заданий входят, кроме шарнирно-рычажных механизмов, кулачковые, зубчатые и трансмиссионные механизмы-приводы, предназначенные для передачи движения к исполнительным органам.
Цель курсового проектирования привить навыки использования общих методов проектирования и исследования механизмов для создания конкретных машин и приборов разнообразного назначения.
Курсовое проектирование ставит задачи:
-
оценка соответствия структурной схемы механизма основным условиям работы машины или прибора; -
проектирование структурной и кинематической схемы рычажного механизма по основным и дополнительным условиям; -
силовой анализ механизма с учётом геометрии масс звеньев при движении их с ускорением; защита механизмов и машин от механических колебаний; определение мощности и выбор типа двигателя;
При разработке комплексного задания на курсовой проект используются характерные механизмы, при проектировании которых усваиваются важнейшие методы синтеза и анализа механизмов.
Целесообразность принятия конкретных решений при проектировании механизмов обосновываются функциональным назначение данной машины.
1. Кинематическое исследование рычажного механизма
1.1. Исходные данные
Дана схема (рис. 1), частота вращения ведущего звена.
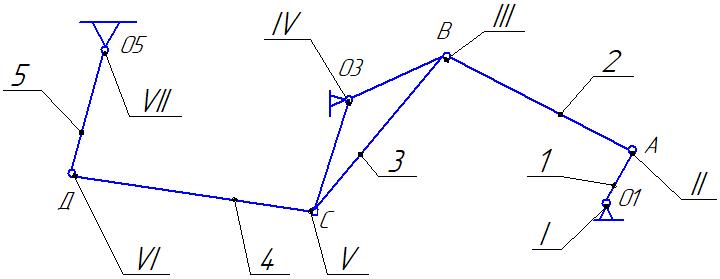
Рис. 1. Схема механизма
| Параметр | Обозначе- ние | | |
| параметр а | един ицы СИ | 7 | |
| Частота вращения кривошипа O1A | n1 | об/ми н | 180 |
| Коэффициент изменения скорости хода звена 3 | Kv | | 1,11 |
| Угол размаха коромысла ОзВ | 3max | град | 45 |
| Длина коромысла 3 | lO3B | м | 0,27 |
| Расстояние между центрами O1 и O3 по оси У | УО3 | м | 0,14 |
| Длина плеча ОзС | lO3C | м | 0,17 |
| Угловая координата крайнего положения коромысла СОзВ | | град | 13 |
| Длина шатуна CD | lCD | м | 0,68 |
| Длина коромысла DO5 | lDO5 | м | 0,22 |
| Номера положений механизма для силового расчета | - | - | 6,4, 9 |
| Масса звена 2 | m2 | кг | 5 |
| Масса звена 3 | m3 | кг | 5,6 |
| Масса звена 4 | m4 | кг | 28 |
| Масса звена 5 | m5 | кг | 3 |
| Моменты инерции звеньев 2, 3, 4, 5 | IS2 | кгм2 | 0,8 |
| относительно | IS3 | кгм2 | 0,13 |
| осей, проходящих через | IS4 | кгм2 | 1,08 |
| центры масс | IS5 | кгм2 | 0,01 |
| Момент сил полезного сопро- тивления | MПС | Нм | 78 |
1.2. Описание построения плана механизма
Принимаемдлину кривошипа1 на чертеже равной 50 мм.
Расчет масштабного коэффициента производим по формуле
 , , | (1.1) |
где
 – масштабный коэффициент, м/мм;
– масштабный коэффициент, м/мм; – длина кривошипа по заданию, м;
– длина кривошипа по заданию, м;ОА – длина кривошипа на чертеже, мм.
 .
.Расчет длин звеньев механизма на чертеже ведем, используя следующую формулу:
 , , | (1.2) |
где
 – длина звена на чертеже, мм;
– длина звена на чертеже, мм; – действительная длина звена, м; – масштабный коэффициент, м/мм.
– действительная длина звена, м; – масштабный коэффициент, м/мм. ;
; .
. .
. .
. .
.1.3. Структурный анализ механизма
Составим описание звеньев и кинематических пар механизма и занесём их, соответственно, в табл. 1.1 и табл. 1.2.
Таблица 1.1-Характеристика звеньев механизма
| Обозначение звена | Описание звена |
| 0 | Стойка |
| 1 | Кривошип |
| 2 | Шатун |
| 3 | Коромысло |
| 4 | Шатун |
| 5 | Коромысло |
Таблица 1.2-Характеристика кинематических пар механизма
| Обозначение пары | Подвижность пары | Звенья, образующие пару | Тип |
| I | Одноподвижная | Стойка, кривошип | Низшая вращательная |
| II | Одноподвижная | Кривошип, шатун | Низшая вращательная |
| III | Одноподвижная | Шатун Коромысло | Низшая вращательная |
| IV | Одноподвижная | Коромысло Стойка | Низшая вращательная |
| V | Одноподвижная | Коромысло Шатун | Низшая вращательная |
| VI | Одноподвижная | Шатун Коромысло | Низшая вращательная |
| VII | Одноподвижная | Коромысло Стойка | Низшая поступательная |
Степень свободы плоского механизма находится по формуле Чебышева
 , , | (1.3) |
где
 – число подвижных звеньев, в данном механизме их 5 (табл. 1.1);
– число подвижных звеньев, в данном механизме их 5 (табл. 1.1); – число одноподвижных кинематических пар 5-го класса, в данном механизме их 7 (табл. 1.2);
– число одноподвижных кинематических пар 5-го класса, в данном механизме их 7 (табл. 1.2); – количество двухподвижных пар 4-го класса, в данном механизме их нет (табл. 1.2).
– количество двухподвижных пар 4-го класса, в данном механизме их нет (табл. 1.2). .
.1.4. Построение кинематических диаграмм
По найденным на планах механизма положениям ведомого звена 5 вычерчиваем график перемещения ползуна B, начиная от крайнего нижнего положения.
Время оборота ведущего звена (кривошипа О1А) найдем по формуле
 , , | (1.4) |
где
 – время оборота кривошипа О1А, с;
– время оборота кривошипа О1А, с; – частота вращения кривошипа О1А, об/мин.
– частота вращения кривошипа О1А, об/мин. .
.Изобразим это время на оси абсцисс отрезком x = 150 мм. Масштабный коэффициент времени на диаграмме рассчитывается по формуле
 , , | (1.5) |
где
 – масштабный коэффициент времени на диаграмме, с/мм; – время оборота кривошипа О1А, с;
– масштабный коэффициент времени на диаграмме, с/мм; – время оборота кривошипа О1А, с; – принятая длина отрезка по оси абсцисс, мм.
– принятая длина отрезка по оси абсцисс, мм. .
.Масштаб перемещений на диаграмме, откладываемых по оси ординат, принимаем равнымвеличине удвоенного масштаба длины на схеме механизма.
где
 – масштабный коэффициент плана положений механизма, м/мм;
– масштабный коэффициент плана положений механизма, м/мм; – коэффициент уменьшения (увеличения) диаграммы перемещений по сравнению с планом положений.
– коэффициент уменьшения (увеличения) диаграммы перемещений по сравнению с планом положений.Масштабный коэффициент угла поворота кривошипа найдем по формуле
 , , | (1.6) |
где
 – масштабный коэффициент угла поворота кривошипа, рад/мм; –масштабный коэффициентвремени на диаграмме, м/мм;
– масштабный коэффициент угла поворота кривошипа, рад/мм; –масштабный коэффициентвремени на диаграмме, м/мм;