ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.10.2023
Просмотров: 169
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
При поступлении на объект возмущающего воздействия отклонение регулируемой величины от заданного значения в связи с инерционностью объекта нарастает постепенно и дифференцирование этого отклонения даёт конечное значение как по абсолютной величине , так и по длительности.
Пример . Пусть отклонение регулируемой величины изменяется по закону:
 =a*t , тогда
=a*t , тогда
U(t)= ∙ а∙t+
∙ а∙t+  ∙ a;
∙ a;
В начальный момент времени срабатывает Д-составляющая , а за тем воздействие на объект увеличивается по нарастающей за счёт П-составляющей.
Передаточная функция: W(p)= + ∙p.
КЧХ: W(jw)= + ∙j∙w=U(w)+j∙V(w).
АЧХ: A(w)=
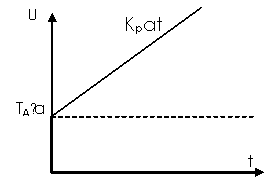
Рисунок 11.9 Переходная характеристика ПД-регулятора
ФЧХ:
ЛЧХ: L(w)=20Lg
1. При <
< w< /
w< /
L1(w)=20Lg (0 дб/дек)
2. При w> /
L2(w)=20Lgw =20Lg +20Lgw (+20 дб/дек).
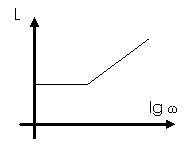
Рисунок 11.10 ЛАХ ПД- регулятора
§ 11.5 Пропорционально-интегрально-дифференциальный (ПИД) регулятор
Регулятор, вырабатывающий регулирующее воздействие пропорциональное отклонению регулируемой величины от заданного значения, скорости и интегралу от этого отклонения называется
пропорционально-интегрально-дифференциальным (ПИД-регулятором).
Уравнение динамики ПИД-регулятора имеет вид:

Передаточная функция регулятора:
где
 коэффициент передачи, постоянная времени интегрирования, постоянная времени дифференцирования соотвественно (настройки регулятора).
коэффициент передачи, постоянная времени интегрирования, постоянная времени дифференцирования соотвественно (настройки регулятора).


 h(t)
h(t)

Kp
 t
t
С помощью данного регулятора можно реализовать любой типовой закон регулирования из рассмотренных ранее.
Очевидно, что данный регулятор обладает достоинствами всех предыдущих законов регулирования.
Раздел 4. Автоматизированные системы контроля
технологических параметров
Глава 8. Государственная система приборов
8.1 Принципы построения и классификация
Государственная система промышленных приборов (ГСП) и средств автоматизации – это совокупность устройств получения, передачи, хранения, обработки и представления информации о состоянии и ходе различных процессов и выработки управляющих воздействий на них.
ГСП состоит из унифицированных элементов, модулей и блоков, допускающих информационное, энергетическое и конструктивное сопряжение в агрегатных комплексах и автоматизированных системах управления (АСУ). В ГСП входят электрические, пневматические и гидравлические приборы и устройства в обыкновенном, виброустойчивом, герметичном, пыле- и влагозащищённом исполнении.
В основу построения ГСП положены следующие принципы: выделение устройства по функциональным признакам, минимизация номенклатуры изделий, блочно-модульное построение технических средств, агрегатное построение систем управления, совместимость приборов и устройств.
По функциональным признакам все изделия ГСП делятся на четыре группы: устройства получения информации о состоянии процесса; устройства приема, преобразования и передачи информации по каналам связи; устройства преобразования, хранения, обработки информации и формирование команд управления; устройства использования командной информации для воздействия на объект управления.
К устройствам получения и первичного преобразования информации о состоянии технологического процесса относятся ПИП (чувствительные элементы), воспринимающие изменение технологических параметров (температура, давление, уровень, расход вещества, вязкость, плотность и др.) и преобразующие его в унифицированный выходной сигнал, передаваемый по каналам связи.
111
К устройствам приема и преобразования информации относятся устройства дистанционной и телемеханической передачи сигналов.
К устройствам преобразования, хранения и обработки информации относятся функциональные и логические блоки, регуляторы, управляющие вычислительные машины и комплексы, а также показывающие и самопишущие измерительные приборы и устройства отображения информации (дисплеи, табло, мнемонические схемы).
К устройствам, использующим информацию для управления технологическим процессом, относятся исполнительные устройства с электрическим, пневматическим и гидравлическим приводом.
Устройства ГСП по виду используемой энергии (сигнала) делят на электрические, пневматические, гидравлические и устройства, работающие без источников вспомогательной энергии (табл.7).
Таблица 7. Основные виды унифицированных аналоговых сигналов ГСП
Связь электрических, пневматических и гидравлических устройств осуществляется с помощью соответствующих преобразователей сигналов. Этим обеспечивается создание комбинированных средств ГСП.
112
8.2 Блочно-модульный принцип построения средств ГСП
Блочно-модульный принцип построения средств ГСП обеспечивает возможность создания различных функционально сложных устройств из ограниченного числа более простых унифицированных блоков и модулей путем их наращивания и стыковки. Это позволяет создавать новые средства измерений и автоматизации из уже существующего набора узлов и блоков, что дает существенный экономический эффект.
Измерительные устройства и системы составляют самую многочисленную группу изделий ГСП, составляющую более половины номенклатуры промышленных изделий ГСП. Они обеспечивают получение измерительной информации о физических величинах (параметрах), характеризующих технологические процессы, свойства и качество продукции.
Классификация измерительных устройств ГСП, учитывающая вид входных и выходных сигналов, приведена на рис. .
Под естественным выходным сигналом в приведенной классификации понимают выходную физическую величину ПИП, полученную однократным простым преобразованием измеряемой физической величины и не соответствующую по параметрам унифицированным сигналам. При этом под простым преобразованием понимают только преобразование, обеспечиваемое используемым для измерения физическим явлением. Несмотря на большое разнообразие величин, виды естественных выходных сигналов ГСП удается ограничить десятью, приведенными на рис.9 .
Для преобразования естественного выходного сигнала в унифицированный в ГСП используются нормирующие преобразователи. В ГСП, несмотря на значительное разнообразие измеряемых величин и используемых для этого принципов измерений, применяются четыре структурные схемы измерительных устройств, а именно: схема прямого однократного преобразования, схема управляющего преобразования (часто называется компенсационной), схема последовательного прямого преобразования, схема прямого дифференциального преобразования.
113



Рис. 9. Классификация выходных сигналов ГСП
С дискретным (контактным) выходным сигналом

Измерительные преобразователи



Естественные выходные сигналы: перемещение, угол поворота, интервалы времени, постоянное напряжение, переменное напряжение, частота, электрическая ёмкость и т.п.
Пример . Пусть отклонение регулируемой величины изменяется по закону:
=a*t , тогдаU(t)=
∙ а∙t+ ∙ a;В начальный момент времени срабатывает Д-составляющая , а за тем воздействие на объект увеличивается по нарастающей за счёт П-составляющей.
Передаточная функция: W(p)=
+ ∙p.КЧХ: W(jw)=
+ ∙j∙w=U(w)+j∙V(w).АЧХ: A(w)=
Рисунок 11.9 Переходная характеристика ПД-регулятора
ФЧХ:
ЛЧХ: L(w)=20Lg
1. При
< w< / L1(w)=20Lg
(0 дб/дек)2. При w>
/ L2(w)=20Lgw
=20Lg +20Lgw (+20 дб/дек). Рисунок 11.10 ЛАХ ПД- регулятора
§ 11.5 Пропорционально-интегрально-дифференциальный (ПИД) регулятор
Регулятор, вырабатывающий регулирующее воздействие пропорциональное отклонению регулируемой величины от заданного значения, скорости и интегралу от этого отклонения называется
пропорционально-интегрально-дифференциальным (ПИД-регулятором).
Уравнение динамики ПИД-регулятора имеет вид:
Передаточная функция регулятора:
где
коэффициент передачи, постоянная времени интегрирования, постоянная времени дифференцирования соотвественно (настройки регулятора). h(t) Kp
tРисунок 11.5.1 Переходная функция ПИД-регулятора
С помощью данного регулятора можно реализовать любой типовой закон регулирования из рассмотренных ранее.
Очевидно, что данный регулятор обладает достоинствами всех предыдущих законов регулирования.
Раздел 4. Автоматизированные системы контроля
технологических параметров
Глава 8. Государственная система приборов
8.1 Принципы построения и классификация
Государственная система промышленных приборов (ГСП) и средств автоматизации – это совокупность устройств получения, передачи, хранения, обработки и представления информации о состоянии и ходе различных процессов и выработки управляющих воздействий на них.
ГСП состоит из унифицированных элементов, модулей и блоков, допускающих информационное, энергетическое и конструктивное сопряжение в агрегатных комплексах и автоматизированных системах управления (АСУ). В ГСП входят электрические, пневматические и гидравлические приборы и устройства в обыкновенном, виброустойчивом, герметичном, пыле- и влагозащищённом исполнении.
В основу построения ГСП положены следующие принципы: выделение устройства по функциональным признакам, минимизация номенклатуры изделий, блочно-модульное построение технических средств, агрегатное построение систем управления, совместимость приборов и устройств.
По функциональным признакам все изделия ГСП делятся на четыре группы: устройства получения информации о состоянии процесса; устройства приема, преобразования и передачи информации по каналам связи; устройства преобразования, хранения, обработки информации и формирование команд управления; устройства использования командной информации для воздействия на объект управления.
К устройствам получения и первичного преобразования информации о состоянии технологического процесса относятся ПИП (чувствительные элементы), воспринимающие изменение технологических параметров (температура, давление, уровень, расход вещества, вязкость, плотность и др.) и преобразующие его в унифицированный выходной сигнал, передаваемый по каналам связи.
111
К устройствам приема и преобразования информации относятся устройства дистанционной и телемеханической передачи сигналов.
К устройствам преобразования, хранения и обработки информации относятся функциональные и логические блоки, регуляторы, управляющие вычислительные машины и комплексы, а также показывающие и самопишущие измерительные приборы и устройства отображения информации (дисплеи, табло, мнемонические схемы).
К устройствам, использующим информацию для управления технологическим процессом, относятся исполнительные устройства с электрическим, пневматическим и гидравлическим приводом.
Устройства ГСП по виду используемой энергии (сигнала) делят на электрические, пневматические, гидравлические и устройства, работающие без источников вспомогательной энергии (табл.7).
Таблица 7. Основные виды унифицированных аналоговых сигналов ГСП
| Электрические сигналы | Пневматический сигнал, кг/см2 | ||||
| Постоянный ток, мА | Постоянное напряжение,мВ | Переменное напряжение, В | Частота, кГц | ||
| 0-5 | 0-10 | 0-2 | 4-8 | | |
| 0-20 | 0-20 | -1…0…+1 | 2-4 | 0,2-1 | |
| | -10…0…+10 | | | | |
| -5…0…+5 | 0-1000 | | | | |
| | -1000…0…+1000 | | | | |
| 4-20 | | | | | |
Связь электрических, пневматических и гидравлических устройств осуществляется с помощью соответствующих преобразователей сигналов. Этим обеспечивается создание комбинированных средств ГСП.
112
8.2 Блочно-модульный принцип построения средств ГСП
Блочно-модульный принцип построения средств ГСП обеспечивает возможность создания различных функционально сложных устройств из ограниченного числа более простых унифицированных блоков и модулей путем их наращивания и стыковки. Это позволяет создавать новые средства измерений и автоматизации из уже существующего набора узлов и блоков, что дает существенный экономический эффект.
Измерительные устройства и системы составляют самую многочисленную группу изделий ГСП, составляющую более половины номенклатуры промышленных изделий ГСП. Они обеспечивают получение измерительной информации о физических величинах (параметрах), характеризующих технологические процессы, свойства и качество продукции.
Классификация измерительных устройств ГСП, учитывающая вид входных и выходных сигналов, приведена на рис. .
Под естественным выходным сигналом в приведенной классификации понимают выходную физическую величину ПИП, полученную однократным простым преобразованием измеряемой физической величины и не соответствующую по параметрам унифицированным сигналам. При этом под простым преобразованием понимают только преобразование, обеспечиваемое используемым для измерения физическим явлением. Несмотря на большое разнообразие величин, виды естественных выходных сигналов ГСП удается ограничить десятью, приведенными на рис.9 .
Для преобразования естественного выходного сигнала в унифицированный в ГСП используются нормирующие преобразователи. В ГСП, несмотря на значительное разнообразие измеряемых величин и используемых для этого принципов измерений, применяются четыре структурные схемы измерительных устройств, а именно: схема прямого однократного преобразования, схема управляющего преобразования (часто называется компенсационной), схема последовательного прямого преобразования, схема прямого дифференциального преобразования.
113
Рис. 9. Классификация выходных сигналов ГСП
С дискретным (контактным) выходным сигналом
Измерительные преобразователи
Естественные выходные сигналы: перемещение, угол поворота, интервалы времени, постоянное напряжение, переменное напряжение, частота, электрическая ёмкость и т.п.