ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 06.11.2023
Просмотров: 36
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
СТРУКТУРНАЯ МОДЕЛЬ НЕЧЕТКОГО КОНТРОЛЛЕРА
Операции над нечеткими множествами
МОДЕЛИРОВАНИЕ ЗАДАЧИ РАЗГОНА ОРУДИЯ НА ТРАКТОРЕ «БЕЛАРУС»
СТРУКТУРА НЕЧЕТКОГО КОНТРОЛЛЕРА
- возможность изменения количества входных переменных;
- возможность изменения количества выходных переменных;
- масштабирования входного и выходного сигнала.
Последний фактор обеспечивается внесением в схему блока масштабирования.
Общая структурная схема нечеткого контроллера представлена на рис. 1.
Общая структурная схема нечеткого контроллера.
Наилучшие результаты были получены при использовании пропорционально-интегрального регулятора и нечеткого контроллера с учетом скачка гистерезиса (наименьший выброс момента после разгона орудия).
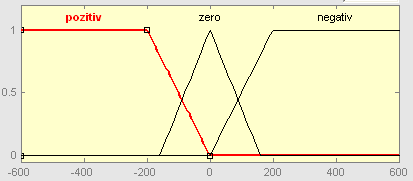
Для построения нечеткого контроллера были выбраны следующие графики функций принадлежности:
Для входной переменной
Для выходной переменной
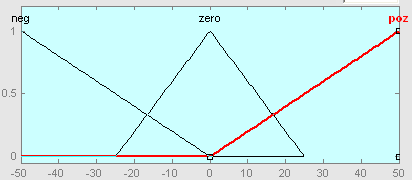
База правил имеет следующий вид:
Если отклонение реального ускорения буксования от заданного положительная величина, то изменение %ШИМ отрицательное;
Если отклонение реального ускорения буксования от заданного величина близкая к нулю, то изменение %ШИМ близкое к нулю;
Если отклонение реального ускорения буксования от заданного отрицательная величина, то изменение %ШИМ положительное;
СТРУКТУРА НЕЧЕТКОГО КОНТРОЛЛЕРА
При проектировании структурной схемы основное внимание было уделено созданию универсального нечеткого контроллера. Основными факторами универсальности и гибкости контроллера являются:- возможность изменения количества входных переменных;
- возможность изменения количества выходных переменных;
- масштабирования входного и выходного сигнала.
Первые два фактора обеспечиваются наличием отдельного блока для вычисления функций каждой входной переменной и возможность наращивания при необходимости входов и выходов блока активизации правил и блока фаззификации.Последний фактор обеспечивается внесением в схему блока масштабирования.
Общая структурная схема нечеткого контроллера представлена на рис. 1.
рис. 1 Общая структурная схема
Общая структурная схема нечеткого контроллера.
В ее состав входят следующие блоки:
1.MB - Блок масштабирования(позиционирует и уменьшает/увеличивает сигнал). Предназначен для адаптированию входных и выходных сигналов к нужному диапазону значений. Коэффициенты масштабирования задаются для каждого блока масштабирования отдельно. Данный блок делает систему более универсальной.
2.F - Блок вычисления функций принадлежности(вычисляет по входному значению значение функции принадлежности). Данный блок предназначен для вычисления первой фазы нечеткого вывода.
3.RB - Блок реализации правил(активизирует соответствующие выходные правила). Данный блок на основании правил и полученных данных от блока вычисления функций активизирует соответствующие выходные правила.
4.AB - Блок объединения площадей. Данный блок объединяет площади функции принадлежности выходных переменных в соответствии с правилами.
5.FB - Блок генерации выходных сигналов(генерирует результат в зависимости от метода дефаззификации).
X[1..n], Y[1..m] – входной/выходной вектор.
MP[] – вектор коэффициентов масштабирования.
P[] – вектор правил.
F – тип функции, вычисляющей выходной вектор.
sum
sub
mul
div
shift
X
Y
SS
KOEF
MD
KOEF
SHIFT
LR
рис.2 Блок масштабирования
На рис.2 представлена структурная схема блока масштабирования, в ее состав входят блоки математических функций для получения из исходного сигнала сигнал, приемлемый для обработки на последующем шаге.
Блок sum представляет собой сумматор(SS – сигнал выбора сумматора/вычитателя, KOEF – коэффициент сложения/вычиния). Блок sub представляет собой вычитатель. Блок mul представляет собой умножитель. (MD – сигнал выбора умножителя/делителя, KOEF – коэффициент умножения/деления) Блок div представляет собой делитель. Блок shift представляет собой блок сдвига. X, Y – входной/выходной сигнал.
DC
min
max
algp
algs
drastp
drasts
MUX
MUX
MUX
MUX
TYPE
TYPE
A B S/M
S/M
Y
рис.3 Блок реализации правил
Блок реализации правил.
На рис.3 представлен блок реализации правил, который в зависимости от входных параметров вычисляет степень истинности условий по каждому из правил системы нечеткого вывода.
Сигнал S/M выбирает тип операции над подусловиями правила («И» или «ИЛИ»). Блок DC представляет собой декодер реализации выбранной операции, которую необходимо выполнить с подусловиями правила, т.к. в нечетком выводе возможны различные варианты выполнения операций «И», «ИЛИ».С помощью мультиплексоров на выход выводится результат вычисления необходимой функции. Функции в блоках min, max, algp, algps, drastp, drasts реализуют различные виды операций и/или в рамках нечеткой логики.
Следующий код демонстрирует реализацию данного блока на vhdl:
library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
use IEEE.STD_LOGIC_ARITH.ALL;
use IEEE.STD_LOGIC_UNSIGNED.ALL;
-- Uncomment the following lines to use the declarations that are
-- provided for instantiating Xilinx primitive components.
--library UNISIM;
--use UNISIM.VComponents.all;
entity ruleblock is
port(
--tup: in std_logic_vector(1 downto 0);
mul: in std_logic;
clk : in std_logic;
code: in std_logic_vector(1 downto 0);
a,b : in integer;
y : out integer
);
end ruleblock;
architecture Behavioral of ruleblock is
component ttrig is
port(
input: in std_logic;
output: out std_logic
);
end component;
component mux21 is
port(
en : in std_logic;
clk: in std_logic;
a,b: in integer;
y: out integer
);
end component;
component algproizv is
port(
clk : in std_logic;
a,b: in integer;
mul, en : in std_logic;
y: out integer
);
end component;
component algsumm is
port(
clk : in std_logic;
a,b: in integer;
mul, en : in std_logic;
y: out integer
);
end component;
component drastproiz is
port(
clk : in std_logic;
a,b: in integer;
mul, en : in std_logic;
y: out integer
);
end component;
component drastsumm is
port(
clk : in std_logic;
a,b: in integer;
mul, en : in std_logic;
y: out integer
);
end component;
component granproiz is
port(
clk : in std_logic;
a,b: in integer;
mul, en : in std_logic;
y: out integer
);
end component;
component gransumm is
port(
clk : in std_logic;
a,b: in integer;
mul, en : in std_logic;
y: out integer
);
end component;
component max is
port(
clk : in std_logic;
a,b: in integer;
mul, en : in std_logic;
y: out integer
);
end component;
component min is
port(
clk : in std_logic;
a,b: in integer;
mul, en : in std_logic;
y: out integer
);
end component;
component mux4 is
port(
clk : in std_logic;
input0,input1,input2,input3 : in integer;
sel : in std_logic_vector(1 downto 0);
output : out integer
);
end component;
component decoder2
port(
code : in std_logic_vector(1 downto 0);
clk : in std_logic;
encode : out std_logic_vector(3 downto 0)
);
end component;
signal encode : std_logic_vector(3 downto 0);
signal y1,y2,y3,y4,y5,y6,y7,y8: integer;
signal yy1,yy2,yy3,yy4: integer;
signal clk2: std_logic;
begin
decoder21 : decoder2
port map(code=>code,clk=>clk,encode=>encode);
clk21 : ttrig
port map(input=>clk, output=>clk2);
min1 : min
port map(clk=>clk,a=>a,b=>b,mul=>mul,en=>encode(0),y=>y1);
max1 : max
port map(clk=>clk,a=>a,b=>b,mul=>mul,en=>encode(0),y=>y2);
algpro : algproizv
port map(clk=>clk,a=>a,b=>b,mul=>mul,en=>encode(1),y=>y3);
algs : algsumm
port map(clk=>clk,a=>a,b=>b,mul=>mul,en=>encode(1),y=>y4);
granp : granproiz
port map(clk=>clk,a=>a,b=>b,mul=>mul,en=>encode(2),y=>y5);
grans : gransumm
port map(clk=>clk,a=>a,b=>b,mul=>mul,en=>encode(2),y=>y6);
drastp : drastproiz
port map(clk=>clk,a=>a,b=>b,mul=>mul,en=>encode(3),y=>y7);
drasts : drastsumm
port map(clk=>clk,a=>a,b=>b,mul=>mul,en=>encode(3),y=>y8);
mux1: mux21
port map(en=>mul,clk=>clk2,a=>y1,b=>y2,y=>yy1);
mux2: mux21
port map(en=>mul,clk=>clk2,a=>y3,b=>y4,y=>yy2);
mux3: mux21
port map(en=>mul,clk=>clk2,a=>y5,b=>y6,y=>yy3);
mux41: mux21
port map(en=>mul,clk=>clk2,a=>y7,b=>y8,y=>yy4);
mux5 : mux4
port map(clk=>clk,input0=>yy1,input1=>yy2,input2=>yy3,input3=>yy4,sel=>code,output=>y );
end Behavioral;
 рис.4 Блок вычисления значения функции принадлежности
рис.4 Блок вычисления значения функции принадлежностиБлок вычисления функций принадлежности.
На рис.4 представлен блок вычисления функций принадлежности, который в зависимости от входных параметров вычисляет значение функции принадлежности заданного вида. input, output – входное/выходное значение. type – тип функции принадлежности. P – различные коэффициенты функций принадлежностию. Реализация данного блока возможна в двух вариантах:
-
При использовании для каждой функции своей аппаратной схемы взависимости от типа функции. Недостатком такого подхода является сложность схемы и разное время вычисления для разных типов функции. Преимуществом является малые аппаратные затраты. -
При использовании табличного метода. В этом случае используется ПЗУ, адрес в котором – входной аргумент функции, а значение по этому адресу – выходное значение функции. Преимуществом является простота реализации, скорость выполнения и одинаковое время вычисления для разных типов функции. Недостатком является большие аппаратные затраты.
ЗАКЛЮЧЕНИЕ
В данной работе была разработана структурная схема и реализация на vhdl отдельных фрагментов нечеткого контроллера. Так же было проведено программное моделирование системы средствами matlab. Была сделана попытка создать наиболее универсальную структуру нечеткого контроллера для обеспечения гибкости и расширения круга решаемых задач.
В перспективе планируется полная реализация контроллера на vhdl, тестирование и внедрение.
ЛИТЕРАТУРА
-
Алиев Р.А., Абдикеев Н.М., Шахназаров М.М. Производственные системы с искусственным интеллектом.- М: Радио и связь. 1990. - 264 с. -
Алтунин А.Е., Семухин М.В. Модели и алгоритмы принятия решений в нечетких условиях. Тюмень: Изд-во Тюменского государственного университета, 2000. - 352 с. -
Архангельский В.И., Богаенко И.Н., Грабовский Г.Г., Рюмшин Н.А. Системы фуцци-управления. – К.: Тэхника, 1997. – 208 с. -
Беллман Р., Заде Л. Принятие решений в расплывчатых условиях.- В кн.: Вопросы анализа и процедуры принятия решений.- М.:Мир, 1976. - С. 172-215. -
Берштейн Л.С., Боженюк А.В. Нечеткие модели принятия решений: дедукция, индукция, аналогия. Таганрог: Изд-во ТРТУ, 2001. - 110 с.