ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 06.11.2023
Просмотров: 37
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
СТРУКТУРНАЯ МОДЕЛЬ НЕЧЕТКОГО КОНТРОЛЛЕРА
Операции над нечеткими множествами
МОДЕЛИРОВАНИЕ ЗАДАЧИ РАЗГОНА ОРУДИЯ НА ТРАКТОРЕ «БЕЛАРУС»
СТРУКТУРА НЕЧЕТКОГО КОНТРОЛЛЕРА
- возможность изменения количества входных переменных;
- возможность изменения количества выходных переменных;
- масштабирования входного и выходного сигнала.
Последний фактор обеспечивается внесением в схему блока масштабирования.
Общая структурная схема нечеткого контроллера представлена на рис. 1.
Общая структурная схема нечеткого контроллера.
СТРУКТУРНАЯ МОДЕЛЬ НЕЧЕТКОГО КОНТРОЛЛЕРА
Козлов В.С.
В последнее время нечеткое моделирование является одной из наиболее активных и перспективных направлений прикладных исследований в области управления и принятия решений. Нечеткое моделирование оказывается особенно полезным, когда в описании технических систем и бизнес-процессов присутствует неопределенность, которая затрудняет или даже исключает применение точных количественных методов и подходов.
В области управления техническими системами нечеткое моделирование позволяет получать более адекватные результаты по сравнению с результатами, которые основываются на использовании традиционных аналитических моделей и алгоритмов управления. Диапазон применения нечетких методов с каждым годом расширяется, охватывая такие области, как проектирование промышленных роботов и бытовых электроприборов, управление доменными печами и движение поездов метро, автоматическое распознавание речи и изображений.
Нечеткая логика, которая служит основой для реализации методов нечеткого управления, более естественно описывает характер человеческого мышления и ход его рассуждений, чем традиционные формально-логические системы. Именно поэтому изучение и использование математических средств для представления нечеткой исходной информации позволяет строить модели, которые наиболее адекватно отражают различные аспекты неопределенности, постоянно присутствующей в окружающей нас реальности.
После первых промышленных приложений в Европе Япония за короткий период времени вышла на первое место в мире по количеству устройств и механизмов, в которых были реализованы нечеткие технологии. Появление микропроцессоров и микроконтроллеров инициировало резкое увеличение бытовых приборов и промышленных установок с алгоритмами управления на основе нечеткой логики.
Имеется целый ряд обстоятельств, которые объясняют причины столь впечатляющей популярности нечеткой логики в Японии. Во-первых, нечеткая логика поддерживает разработку быстрого прототипа технического устройства с последующим усложнением его функциональности
, что характерно для стиля работы японских инженеров. Во-вторых, нечеткая логическая модель более проста для понимания, чем аналогичная математическая модель на основе дифференциальных или разностных уравнений. В-третьих, нечеткие модели оказываются более простыми для своей аппаратной реализации по сравнению с классическими алгоритмами управления техническими системами.
В результате этого нечеткие технологии нашли свое применение в самых различных технических устройствах и бытовых приборах, выпускаемых японскими фирмами. Фотоаппараты и видеокамеры используют нечеткую логику, чтобы реализовать опыт фотографа в управлении этими устройствами. Например компании Fisher и Sanyo производят нечеткие логические видеокамеры, в которых применяется нечеткая фокусировка и стабилизация изображения.
Компания Matsushita выпускает стиральную машину, в которой используются датчики и микропроцессоры с нечеткими алгоритмами управления. Датчики определяют цвет и вид одежды, количество твердых частиц, степень загрязнения, а нечеткий микропроцессор выбирает наиболее подходящую программу стирки из 600 доступных комбинаций температуры воды, количества стирального порошка и времени производственного цикла быстрого или медленного вращения и промывки.
Компания Mitsubishi объявила о выпуске первого в мире автомобиля, где управление каждой системой основано на нечеткой логике. При этом Mitsubishi производит так же «нечеткий» кондиционер, который управляет изменением температуры и влажности в помещении согласно человеческому восприятию степени комфорта. Компания Nissan разработала «нечеткую» автоматическую трансмиссию и «нечеткую» противоскользящую тормозную систему и реализовала их в одном из своих последних автомобилей повышенной комфортности.
Японский город Сендай имеет метрополитен с 16 станциями, который управляется нечетким компьютером. При этом нечеткий компьютер процессы ускорения и торможения поездов метро, делая на 70% меньше ошибок, чем соответствующий человек-оператор.
ОСНОВЫ НЕЧЕТКОЙ ЛОГИКИ
Нечеткое множество
Базисное понятие нечетких систем - Нечеткое (под)множество. В классической математике мы в основном используем четкие множество.
Для примера:
Сначала мы рассмотрим множество X всех вещественных чисел между 0 и 10, которые мы назовем областью исследования. Теперь, давайте определим подмножество X всех вещественных чисел в амплитуде между 5 и 8.
A = [5,8]
Теперь представим множество A с помощью символической функции, т.е. эта функция приписывает число 1 или 0 к каждому элементу в X, в зависимости от того, находится ли элемент в подмножестве А или нет. Это приводит к следующей диаграмме:
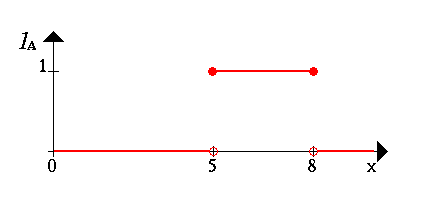
Мы можем интерпретировать элементы, которым назначено число 1, как элементы которые находятся в множестве А и элементы, которым назначено число 0, как элементы не в множестве A.
Этой концепции достаточно для многих областей приложений. Но мы можем легко найти ситуации, где теряется гибкость. Чтобы показать это рассмотрим следующий пример:
В этом примере мы хотим описать множество молодых людей. Более формально мы можем обозначить
B = {множество молодых людей}
Поскольку, вообще, возраст начинается с 0, нижняя граница этого множества должна быть нулевой. Верхнюю границу, с другой стороны, надо определить. На первый раз определим верхнюю границу множества, скажем, 20 лет. Следовательно, мы получаем B как четкий интервал, а именно:
B = [0,20]
Теперь возникает вопрос: почему кто-то на его 20-ом дне рождения молодой, а на следующий день не молодой? Очевидно, это - структурная проблема, поскольку, если мы перемещаем верхнюю границу от 20 до произвольной точки, мы можем излагать тот же самый вопрос.
Более естественный способ описать множество B состоит в том, чтобы ослабить строгое разделение между молодыми и не молодыми. Мы будем делать это, допуская не только (четкое) решение ДА он/она находится в множестве молодых, или НЕТ он/она не в множестве молодых, но более гибких фраз подобно Хорошо, он/она принадлежит немного больше к множеству молодых или НЕТ, он/она почти не принадлежит к множеству молодых.
Как упомянуто во введении, мы хотим использовать нечеткие множества, чтобы делать компьютеры более интеллектуальными. Теперь мы должны закодировать вышеупомянутую идею более формально. В нашем первом примере мы кодировали все элементы Области Исследования 0 или 1. Прямой путь обобщить эту концепцию состоит в том, чтобы позволить большее количество значений между 0 и 1. Фактически, мы даже позволяем бесконечно многие варианты между 0 и 1, а именно единичный интервал I = [0, 1].
Интерпретация чисел, теперь назначенная всем элементам Области Исследования, намного более трудная. Конечно, снова число 1 назначено элементу как способ определить элемент который находится в множестве B и 0 - способ, при котором элемент не определен в множестве B. Все другие значения означают постепенную принадлежность к множеству B.
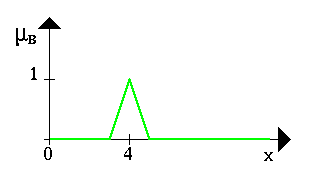
Для большей наглядности, теперь мы показываем множество молодых, подобно нашему первому примеру, графически при помощи символической функции.
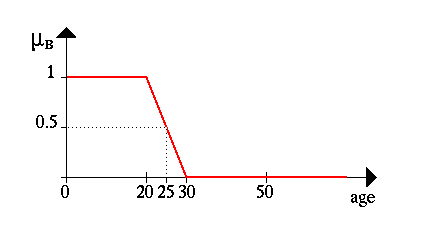
При таком способе 25-летние люди будут все еще молоды на 50 процентов. Теперь Вы знаете, что такое нечеткое множество. Но что Вы можете делать с этим?
Операции над нечеткими множествами
Теперь, когда мы имеем понятие, что такое нечеткие множества, мы можем вводить основные операции на нечетких множествах. Подобно операциям на четких множествах, мы также хотим определить пересечение, объединение и отрицание на нечетких множествах. В ранней статье о нечетких множествах Заде предложил оператор минимума для пересечения и оператор максимума для объединения двух нечетких множеств. Легко видеть, что эти операторы совпадают с четким объединением, и пересечением, если мы рассматриваем только принадлежность к 0 и 1.
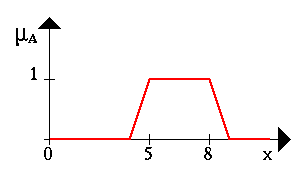
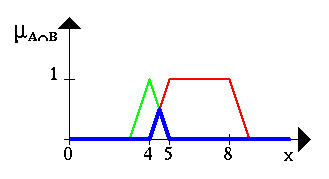
Чтобы разъяснять это, мы дадим несколько примеров. Допустим А есть нечеткий интервал между 5 и 8, а B - нечеткое число, приблизительно 4. Соответствующие диаграммы показаны ниже.
Следующая диаграмма показывает нечеткое множество между 5 и 8 И (AND - пересечение) приблизительно 4 (синяя линия).
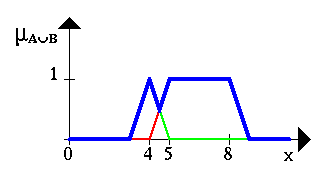
Нечеткое множество между 5 и 8 ИЛИ (OR-объединение) приблизительно 4 показывается в следующей диаграмме (снова, синей линией).
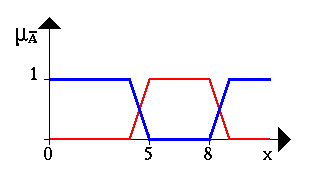
Следующая диаграмма является примером отрицания. Синяя линия - ОТРИЦАНИЕ нечеткого множества A.
Нечеткое управление
Нечеткие контроллеры - наиболее важное приложение нечеткой теории. Их работа сильно отличается от работы стандартных контроллеров; экспертное знание используется вместо дифференциально-разностных уравнений, чтобы описать систему. Это знание может быть выражено естественным способом, использующим лингвистические переменные, которые описаны размытыми множествами.
Применения Нечеткой Логики
Разделим возможную область применения Нечеткого Управления на две группы.
Случаи, когда использование Нечеткого Управления разумно:
-
Для очень комплексных процессов, когда нет простой математической модели -
Для очень нелинейных процессов -
Когда необходимо выполнить обработку (лингвистически сформулированного) экспертного знания
Случаи, в которых использование Нечеткого Управления нерационально:
-
Стандартная теория управления обеспечивает удовлетворяющий результат -
Легко разрешимая и адекватная математическая модель уже существует -
Задача не разрешима
МОДЕЛИРОВАНИЕ ЗАДАЧИ РАЗГОНА ОРУДИЯ НА ТРАКТОРЕ «БЕЛАРУС»
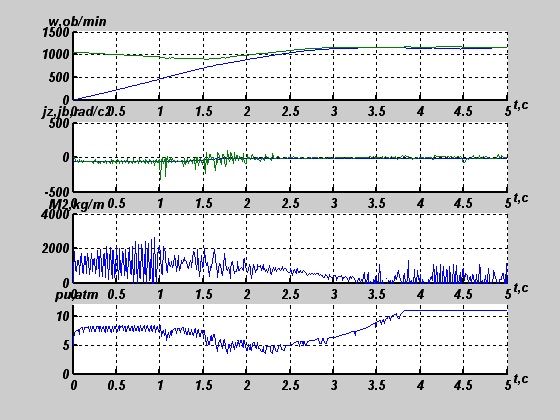
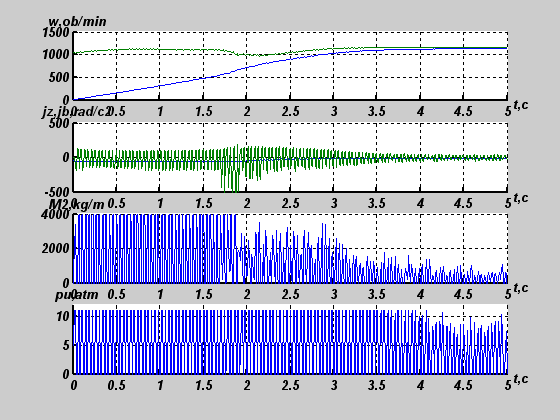
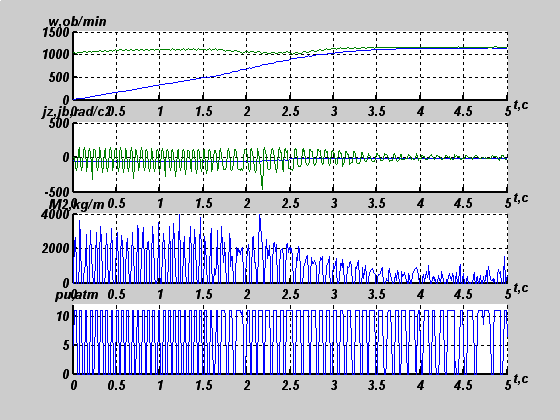
Стояла задача создания модели разгона орудуя на тракторе «Беларус» с использованием различных видов контроллеров, в том числе с использованием «нечеткого» контроллера. Основными критериями качества управления были: время разгона орудия (не более двух секунд) и обеспечение минимального выброса момента после разгона.
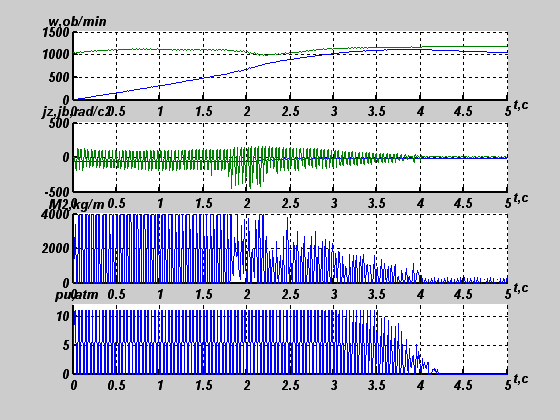
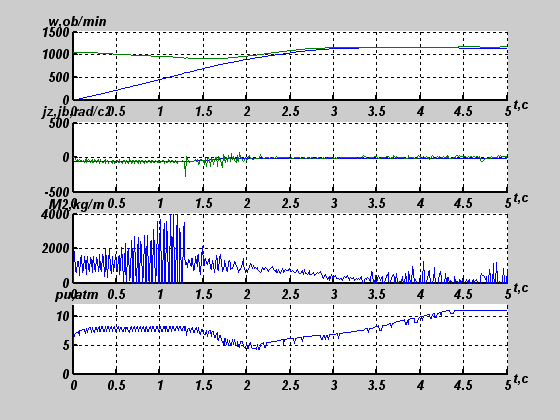
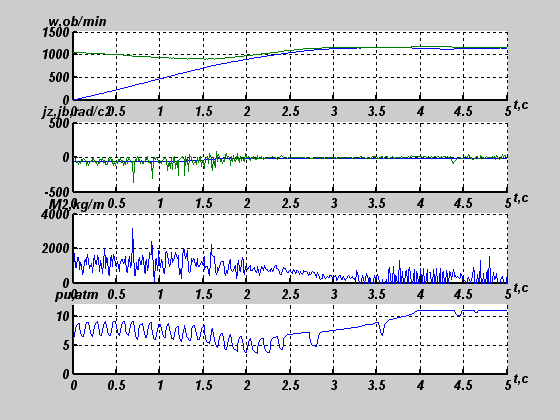
На представленных ниже результатах работы контроллеров изображены: на первом графике обороты двигателя и орудия; на втором – ускорение буксования (заданное и реальное); на третьем – момент; на четвертом – давление между фрикционными муфтами.
Результаты работы пропорционального регулятора:
Результаты работы пропорционального регулятора с инерционным звеном:
Результаты работы пропорционально-интегрального регулятора:
Результаты работы пропорционально-интегрального регулятора с инерционным звеном:
Результаты работы пропорционально-интегрально-дифференциального регулятора:
Результаты работы нечеткого контроллера:
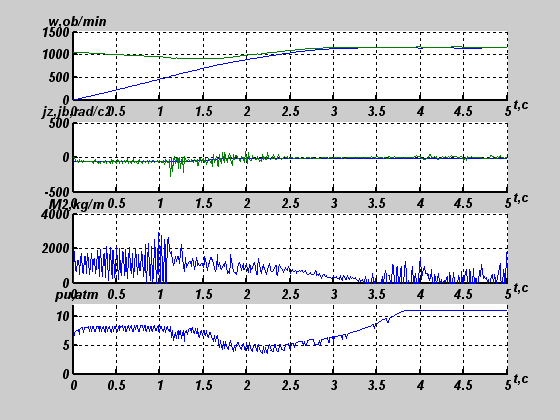
Результаты работы нечеткого контроллера с учетом скачка гистерезиса: