Файл: 18. Синхронные машины устройство и принцип действия Основными частями.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 07.11.2023
Просмотров: 19
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
18. Синхронные машины устройство и принцип действия
Основными частями синхронной машины являются якорь и индуктор (обмотка возбуждения). Как правило, якорь располагается на статоре, а на отделённом от него зазором роторе находится индуктор — таким образом, по принципу действия синхронная машина представляет собой как бы «вывернутую наизнанку» машину постоянного тока, переменный ток для обмотки якоря которой не получается с помощью коллектора, а подводится извне.
Принцип действия синхронного двигателя основан на взаимодействии вращающегося магнитного поля якоря и магнитного поля полюсов индуктора. Обычно якорь расположен на статоре, а индуктор — на роторе. В мощных двигателях в качестве полюсов используются электромагниты (ток на ротор подаётся через скользящий контакт щётка-кольцо), в маломощных, к примеру, в двигателях жёстких дисков — постоянные магниты.
19. Холостой ход синхронного генератора
Холостой ход - режим работы генератора, при котором ток в обмотке якоря (статора) равен нулю.
При холостом ходе магнитный поток Ф 0 создается только м. д. с. обмотки возбуждения. Этот поток, проходя через воздушный зазор, сцепляется с обмоткой якоря и при вращении индуктора наводит в каждой фазе обмотки якоря э. д. с. Форма кривой э. д. с., индуцированной в обмотке якоря при холостом ходе, должна быть возможно ближе к синусоиде.
20. Работа синхронного генератора при нагрузке. Реакция якоря
Работа синхронного генератора под нагрузкой. Если синхронный генератор не нагружен, т. е. работает вхолостую, то тока в обмотках статора нет. Магнитный поток полюсов, созданный током возбуждения, индуктирует в трехфазной обмотке статора э. д. с. При нагрузке генератора в обмотке статора протекает ток. При симметричной нагрузке токи в фазах обмотки статора равны и сдвинуты на 1/3 периода.
Реакция якоря различна при различных нагрузках. В случае активной нагрузки общий магнитный поток генератора несколько увеличивается, и ЭДС генератора возрастает. В случае индуктивной нагрузки общий магнитный поток генератора уменьшается. При ёмкостной нагрузке ЭДС увеличивается. Реакция якоря в синхронной машине приводит к изменению суммарного магнитного потока и ЭДС, что нежелательно.
21.Характеристики синхронных генераторов
Основными величинами, характеризующими синхронный генератор, являются: напряжение на зажимах U, нагрузка I, полная мощность P (кВа), число оборотов ротора в минуту n, коэффициент мощности cos φ.
Важнейшие рабочие характеристики синхронного генератора следующие: характеристика холостого хода, внешняя характеристика, регулировочная характеристика.
22. Включение синхронного генератора на параллельную работу с сетью. Синхронизация.
Процесс включения генераторов на параллельную работу называется синхронизацией. Другими словами, синхронизация – процесс уравнивания частоты вращения и напряжения включаемого генератора с частотой вращения работающих генераторов и напряжением на электростанции, а также выбор соответствующего момента времени для подачи импульса на включение выключателя генератора.
23. Синхронный двигатель. Синхронный компенсатор.
Синхронный компенсатор — синхронный двигатель, предназначенный для выработки реактивной мощности, работающий без нагрузки на валу (в режиме холостого хода); при этом по обмотке якоря проходит практически только реактивный ток.
24. Принцип действия и устройство машины постоянного тока
Принцип работы электрических машин постоянного тока основан на использовании явления электромагнитной индукции, а также законов, которые определяют взаимодействие электрических токов и магнитных полей. Эти машины включают в себя неподвижную и вращающуюся части. В конструкцию неподвижной части, или статора входят станина, главные и дополнительные полюса, подшипниковые щиты и щеточная траверса с графитовыми или медно-графитовыми щетками.
25. Реакция якоря в машинах постоянного тока
Реакцией якоря называется воздействие магнитного поля, создаваемого током якоря, на магнитное поле главных полюсов машины.
В результате реакции якоря магнитная индукция в зазоре машины становится еще более неравномерной. В проводниках якоря, находящихся в точках повышенной магнитной индукции, индуцируется большая э. д. с, что приводит к увеличению разности потенциалов между соседними пластинами коллектора и к возникновению искрения на коллекторе.
26. Коммутация в машинах постоянного тока
Под коммутацией в машинах постоянного тока понимают явления, вызванные изменением направления тока в проводниках обмотки якоря при переходе их из одной параллельной ветви в другую, т. е. при пересечении линии, по которой расположены щетки (от лат. commulatio — изменение).
27.Способы улучшения коммутация в машинах постоянного тока
Основным способом улучшения коммутации в современных машинах постоянного тока является создание коммутирующего магнитного поля с помощью добавочных полюсов. Эффективной мерой улучшения коммутации при резко переменной нагрузке является также применение компенсационной обмотки, которая предотвращает опасность возникновения кругового огня, а также улучшает условия действия добавочных полюсов.
28. Классификация генераторов постоянного тока
В зависимости от способа питания обмотки возбуждения различают генераторы:
с независимым возбуждением
с параллельным возбуждением
с последовательным возбуждением (сериесный)
со смешанным возбуждением (компаундный); он имеет две обмотки возбуждения; одна включена параллельно обмотке якоря, а другая - последовательно с нею и нагрузкой
29. Характеристики генераторов постоянного тока
Всего у генератора постоянного тока 5 характеристик:
1. U(iв) при In=0, ω=const – характеристика холостого хода (х.х.х);
2. U(iв) при Iа≠0=const, ω=const – нагрузочная характеристика;
3. U(Iа) при iв=const, ω=const – внешняя характеристика;
4. iв(Iа) при U=const, ω=const – регулировочная характеристика;
5. Iа(iв) при U=0, ω=const – характеристика короткого замыкания.
1-я и 5-я характеристики называются граничными.
Характеристики 2, 3, 4 – характеристики работы генератора под нагрузкой.
Характеристики 1, 2, 3, 4, 5 показывают, как изменяется выходная величина при изменении входной величины в результате физических процессов, происходящих в генераторе.
Характеристика 4 – зависимость между величинами, не имеющими связи, поэтому она показывает не как изменяется ток возбуждения при изменении тока якоря, а как нужно изменить его, чтобы напряжение на зажимах якоря оставалось постоянным.
30. Классификация двигателей постоянного тока
Двигатели постоянного тока классифицируются в зависимости от способа соединения обмотки возбуждения с якорем:
1. Двигатель параллельного возбуждения (если напряжение обмотки возбуждения иное, то такой двигатель называется двигателем независимого возбуждения).
2. Двигатель последовательного возбуждения.
3. Двигатель смешанного возбуждения.
31. Характеристики двигателей постоянного тока
Наиболее важными характеристиками двигателя постоянного тока являются:
1)Моментная характеристика устанавливает зависимость электромагнитного момента М от тока якоря Iа: М=Сm*Ia*Ф, где
где Сm – конструктивный коэффициент момента, Ф – магнитный поток.
2) Механической характеристикой двигателя называют зависимость частоты вращения n от электромагнитного момента при постоянных значениях напряжения якорной цепи U, магнитного потока и сопротивлений цепей. Эта зависимость описывается выражением: n=
 , где Се–конструктивный коэффициент ЭДС, Ra - сопротивления якорной цепи.
, где Се–конструктивный коэффициент ЭДС, Ra - сопротивления якорной цепи.3) Регулировочные характеристики представляют собой зависимость частоты вращения от регулируемой величины.
32. Пуск двигателей постоянного тока
Пуск двигателя постоянного тока производится при последовательном уменьшении сопротивления реостата, обычно — путем перевода рычага реостата с одного неподвижного контакта реостата на другой и выключения секций; уменьшение сопротивления может производиться и путем замыкания накоротко секций контакторами, срабатывающими по заданной программе.
33. Регулирование частоты вращения двигателей постоянного тока
Частоту вращения электродвигателей постоянного тока регулируют:
введением резисторов в цепь якоря двигателя;
изменением магнитного потока;
изменением напряжения, приложенного к якорю электродвигателя.
В зависимости от способа регулирования частоты вращения получаются различные искусственные механические характеристики.
1.Электромеханическое преобразование энергии. Материалы, применяемые в электромашиностроении
Электромеханическое преобразование энергии включает в себя обмен энергией между электрической системой и механической системой посредством электрического или магнитного поля. Таким образом, система электромеханического преобразования состоит из трех основных частей: электрической системы, механической системы и поля связи (электрического или магнитного).
В электромашиностроении применяются в основном те же конструктивные материалы, что и в общем машиностроении. К ним относятся сталь, чугун, цветные металлы и пластмассы. Активные материалы служат для проведения магнитного потока машины и электрического тока и делятся на токопроводящие и магнито-проводящие. В качестве основного токопроводящего материала до последнего времени использовалась.
2. Конструкция трансформаторов
Конструкция трансформатора включает в себя: магнитопровод, обмотки, бак, а также крышки с вводами.
Основными частями конструкции трансформатора являются:
магнитопровод; обмотки; каркас для обмоток; изоляция; система охлаждения;
прочие элементы (для монтажа, доступа к выводам обмоток, защиты трансформатора и т. п.).
При конструировании трансформатора производитель выбирает между тремя различными базовыми концепциями: Стержневой; Броневой; Тороидальный.
3. Закон электромагнитной индукции
Закон электромагнитной индукции. При изменении внешнего магнитного потока, пронизывающего контур, в контуре возникает индукционный ток. При этом значение электродвижущей силы численно равно скорости изменения магнитного потока, взятой со знаком «-». Правило Ленца является следствием закона сохранения энергии в электромагнитных явлениях.
4. Процессы, происходящие в трансформаторе при холостом ходе
Опыт холостого хода подразумевает подачу напряжения на первичную обмотку при отсутствии нагрузки. При помощи подключенных измерительных приборов измеряются электрические параметры конструкции.
Для проведения опыта холостого хода первичную обмотку включают в сеть последовательно с прибором для измерения тока- амперметром. Параллельно зажимам подключается вольтметр.
Следует иметь в виду, что предел измерения вольтметра должен соответствовать подаваемому напряжению, а при выборе амперметра нужно учитывать ориентировочные значения измеряемой величины, которые зависят от мощности трансформатора.
5. Процессы, происходящие в трансформаторе при нагрузке
Работа трансформатора под нагрузкой. В режиме нагрузки, в отличие от режима холостого хода, к вторичной обмотке трансформатора присоединяется потребитель электрической энергии. Таким образом, электрические цепи первичной и вторичной обмоток оказываются замкнутыми и в обоих обмотках протекают переменные токи. Переменные токи создают магнитодвижущие силы первичной и вторичной обмоток трансформатора.
6. Приведение вторичной обмотки трансформатора к первичной
При расчете электрической цепи с трансформатором задача расчета усложняется из-за магнитной связи первичной и вторичной обмоток трансформатора. Для устранения магнитной связи составляется эквивалентная электрическая схема, когда обе обмотки объединяют в одну, сделав равными ЭДС (Е1=Е2) этих обмоток. Равенство будет выполнено, если число витков вторичной обмотки w2 сделать равным числу витков первичной обмотки w1, т. е. w2=w1. При этом необходимо пересчитать все величины вторичной обмотки – привести вторичную обмотку к числу витков первичной обмотки, в этом случае трансформатор называется приведенным.
7. Основные уравнения и векторная диаграмма приведенного трансформатора


По этим уравнениям можно построить векторную диаграмму.

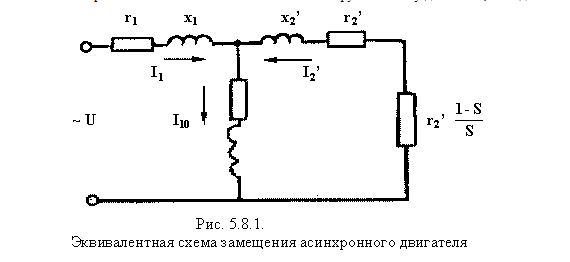
8. Схема замещения трансформатора
С
 хема замещения — это электрическая цепь, описываемая теми же уравнениями, что и обмотки реального трансформатора. Преимуществом схемы замещения является то, что в ней элементы, эквивалентирующие первичную и вторичную обмотки, электрически соединены между собой, а индуктивная связь отсутствует.
хема замещения — это электрическая цепь, описываемая теми же уравнениями, что и обмотки реального трансформатора. Преимуществом схемы замещения является то, что в ней элементы, эквивалентирующие первичную и вторичную обмотки, электрически соединены между собой, а индуктивная связь отсутствует.Схема за-мещения трансформатора представляет собой совокупность трех ветвей:
первичной – сопротивлением Z1 = r1 + j × x1 и током I&1;
намагничивающей – сопротивлением Z0 = r0 + j × x0 и током I&0;
вторичной с двумя сопротивлениями – сопротивлением вто-ричной ветви Z2¢ = r2¢ + j × x2¢ и сопротивлением нагрузки Zн¢ = rн¢.
9. Параллельная работа трансформаторов
Параллельная работа трансформаторов – соединение трансформаторов для совместной работы, при таком подключении одноименные выводы обмотки со стороны высокого напряжения и выводы обмотки со стороны низкого напряжения соединяются между собой.
10. Регулирование напряжения трансформаторов
Регули́рование напряже́ния трансформа́тора — изменение числа витков обмотки трансформатора. Применяется для поддержания нормального уровня напряжения у потребителей электроэнергии. Большинство силовых трансформаторов оборудовано некоторыми приспособлениями для настройки коэффициента трансформации путём добавления или отключения числа витков.
11. Принцип действия и конструкция асинхронных машин
Асинхронная машина предназначена для преобразования электрической энергии переменного тока в механическую энергию. У асинхронных двигателей частота вращения магнитного поля статора всегда больше частоты вращения ротора. Работают асинхронные двигатели от сети переменного тока.
Асинхронная машина имеет статор и ротор, разделённые воздушным зазором. Её активными частями являются обмотки и магнитопровод (сердечник); все остальные части — конструктивные, обеспечивающие необходимую прочность, жёсткость, охлаждение, возможность вращения и т. п.
12. Холостой ход асинхронного двигателя
Холостой ход асинхронного двигателя подразумевает отсутствие на валу нагрузки в виде рабочего органа или редуктора. В режиме холостого хода скольжение составляет s /. В режиме холостого хода ротор вращается с частотой лишь немного меньшей синхронной частоты вращения n 1 и скольжение весьма мало отличается от нуля.
13. Асинхронный двигатель при нагрузке. Замена вращающегося ротора неподвижным
В рабочем режиме ротор двигателя вращается с числом оборотов в минуту n2, меньшим числа оборотов n1 магнитного поля статора, вращающегося в том же направлении, что и ротор. Поэтому магнитное поле, имеющее большую скорость, скользит относительно ротора с числом оборотов, равным разности чисел оборотов поля и ротора, т. е. ns=n1-n2 [об/мин]
П
 ри вращении ротора основной магнитный поток вращается относительно ротора с частотой n2=n1-n=
ри вращении ротора основной магнитный поток вращается относительно ротора с частотой n2=n1-n= =sn1,
=sn1,пропорциональной скольжению, поэтому частота наведенной в обмотке ротора ЭДС также будет пропорциональна скольжению: f2s=
 =
= =sf1.
=sf1.Действующее значение этой ЭДС определяется выражением
E2s=4,44*f2s*w2*Kоб2*Ф1=sE2,
где E2 - ЭДС, наведенная в обмотке неподвижного ротора.
Индуктивное сопротивление рассеяния обмотки вращающегося ротора также будет пропорционально скольжению: xб2s=2
 f1*s*Lб2=sxб2,
f1*s*Lб2=sxб2,где xб2 - индуктивное сопротивление рассеяния неподвижного ротора.
Зависимость активного сопротивления обмотки ротора от частоты f2s носит более сложный характер (см. п. 4.10). При данном рассмотрении эта зависимость не имеет принципиального значения, поэтому примем r2s=r2 .
С учетом сделанных замечаний уравнение напряжений вращающегося ротора будет иметь вид 0=sE2-(jsxб2+r2)I2.
Отсюда ток ротора: I2=

14. Приведение обмотки ротора асинхронной машины к статорной
E2=
 *f1*w1*kоб2* kс*Ф,
*f1*w1*kоб2* kс*Ф,а в приведенной обмотке ротора и в обмотке статора – одинаковые по величине ЭДС: E`2=Е1=
*f1*w1*kоб*Ф.Назовём коэф. трнасформации или коэф. приведения ЭДС и напряжений ku отношение: ku=
 =
=
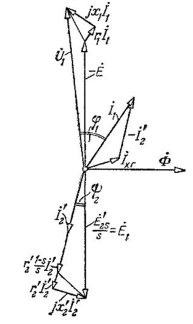
15. Уравнения и векторные диаграммы асинхронной машины
U1, приложенное к фазе обмотки статора, уравновешивается основной ЭДС Е1, ЭДС рассеяния и падением U на активном R статора: U1=(-E1)+I1x1+I1r1
В роторной обмотке аналогичное уравнение будет иметь вид: U2=E2s+jI2x2s+ I2r2
Но т.к. роторная обмотка замкнута, то U2=, и если учесть ещё E2s=SE2 и х2=Sx2, то уравнение можно переписать в виде: 0=Е2-j I2x2-I2

Уравнение токов асинхронного двигателя повторяет аналогичное уравнение Тр-ра: I1=I01+(-I2`), где I2=I2

16. Схема замещения асинхронного двигателя
17. Регулирование частоты вращения асинхронного двигателя
n2=(1-s)
 -изменением скольжения, для этого в фазном двигателе в цепь обмотки ротора включают регулировочный реостат, но при этом будут большие тепловые потери. S можно менять с помощью напряжения питания.
-изменением скольжения, для этого в фазном двигателе в цепь обмотки ротора включают регулировочный реостат, но при этом будут большие тепловые потери. S можно менять с помощью напряжения питания.-изменяя количество пар полюсов, переключая секции обмотки статора, но регулирование будет ступенчатое.
-изменением частоты питающего тока, для этого применяют преобразователи частоты.
-чтобы осуществить реверс меняют местами две фазы обмотки статора.