Файл: Реферат Выбор мощности эд для продолжительных режимов работы.docx
Добавлен: 07.11.2023
Просмотров: 45
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Реферат
«Выбор мощности ЭД для продолжительных режимов работы»
по дисциплине «Регулируемый электропривод переменного тока»
Содержание:
Часть № 1
a.Общие принципы регулирования электропривода 3
b.Регулируемый электропривод постоянного тока 6
c.Регулируемый электропривод переменного тока 7
d. Переходные процессы в электроприводе 8
Часть № 2
e. Факторы, определяющие выбор мощности двигателя 9
f. Выбор мощности двигателя для длительного режима работы 12
g. Список использованной литературы 17
Часть № 1
a. Общие принципы регулирования электропривода
Электрический привод (ЭП) представляет собой электромеханическую систему, обеспечивающую реализацию различных технологических и производственных процессов в промышленности, сельском хозяйстве, на транспорте, коммунальном хозяйстве и в быту с использованием механической энергии. Назначение ЭП состоит в обеспечении движения исполнительных органов рабочих машин и механизмов и управлении этим движением. Другими словами, ЭП, являясь энергетической основой реализации технологических и производственных процессов, во многом определяет их качество, энергетические и технико-экономические показатели.
Для выполнения своей основной – приведение в движение исполнительных органов рабочих машин и механизмов и управления этим движением – ЭП включает в себя совокупность взаимосвязанных и взаимодействующих друг с другом электротехнических и механических элементов, и устройств. Такая электромеханическая система и получила название электрического привода. Общая структурная схема ЭП приведена на рис.1, где утолщенными линиями показаны силовые каналы энергии, а тонкими – маломощные (информационные) цепи.
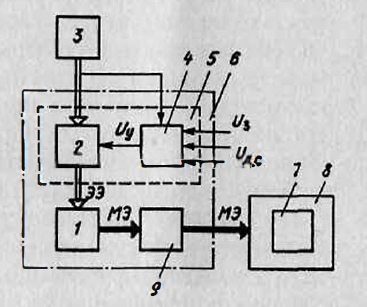
Рисунок 1
Основным элементом любого электропривода 6 служит электрический двигатель 1, который вырабатывает механическую энергию (МЭ) за счет потребляемой электрической энергии, т.е. является электромеханическим преобразователем энергии. В некоторых режимах работы ЭП электродвигатель осуществляет и обратное преобразование энергии, получая механическую энергию от исполнительного органа рабочей машины.
От электродвигателя механическая энергия через передаточное устройство
9 (механическое, гидравлическое, электромагнитное) подается на исполнительный орган 7 рабочей машины 8, за счет чего тот совершает требуемое механическое движение. Функция передаточного устройства заключается в согласовании параметров движения электродвигателя и исполнительного органа. Прогрессивным направлением развития ЭП является использование непосредственного соединения электродвигателя с исполнительным органом, что позволяет повысить технико-экономические показатели работы комплекса «электропривод-рабочая машина».
Электрическая энергия поступает в ЭП от источника электроэнергии 3. Для получения электроэнергии с требуемыми для электродвигателя параметрами и управления потоком этой энергии между двигателем и источником электроэнергии включается силовой преобразователь 2.
Функции управления и автоматизации в ЭП осуществляются маломощным блоком управления 4. Этот блок вырабатывает сигнал управления
 с помощью входного сигнала
с помощью входного сигнала  , задающего характер движения исполнительного органа, и ряда дополнительных сигналов
, задающего характер движения исполнительного органа, и ряда дополнительных сигналов  , дающих информацию о реализации технологического процесса рабочей машины, характере движения исполнительного органа, работе отдельных узлов ЭП, возникновении аварийных ситуаций и др. Преобразователь 2 вместе с блоком управления 4 образуют систему управления электроприводом 5.
, дающих информацию о реализации технологического процесса рабочей машины, характере движения исполнительного органа, работе отдельных узлов ЭП, возникновении аварийных ситуаций и др. Преобразователь 2 вместе с блоком управления 4 образуют систему управления электроприводом 5.Итак, электрическим приводом называется электромеханическая система, состоящая из взаимодействующих электрических, электромеханических и механических преобразователей, а также управляющих, информационных устройств и устройств сопряжения, предназначенная для приведения в движение исполнительных органов рабочих машин и управления этим движением в целях осуществления технологического процесса.
В ЭП используются электродвигатели вращательного и поступательного движения постоянного и переменного тока непрерывного и дискретного перемещений; механические преобразователи в виде цилиндрических, червячных и планетарных редукторов, передач винт – гайка, цепных и ременных передач, гидравлических и электромагнитных муфт ;электрические силовые преобразователи, включающие в себя управляемые выпрямители, инверторы тока и напряжения, регуляторы частоты и напряжения, импульсные регуляторы напряжения; устройства управления, в состав которых входят командоаппараты,
блоки логических элементов, регуляторы, усилители, микропроцессоры и управляющие электронные машины.
ЭП классифицируются по характеру движения, виду и способам реализации силового преобразователя, числу используемых электродвигателей, виду источников энергии, способу управления, наличию или отсутствию механической передачи и т.д.
b.Регулируемый электропривод постоянного тока
В ЭП используются двигатели постоянного тока независимого (ДПТНВ), последовательного (ДПТПВ) и смешанного (ДПТСВ) возбуждения, а также двигатели с возбуждением от постоянных магнитов, которые по своим характеристикам близки к ДПТНВ.
Электроприводы с ДПТНВ являлись до недавнего времени основным видом регулируемого ЭП. Созданные на базе системы «управляемый выпрямитель – двигатель» (УВ – Д) замкнутые ЭП обеспечивают регулирование координат движения исполнительных органов рабочих машин и механизмов во всех режимах работы с высокими показателями качества.
Электротехническая промышленность выпускает двигатели постоянного тока основной общепромышленной серии 2П в диапазон мощностей от 0,13 до 200 кВт различного конструктивного исполнения и с разными способами вентиляции, предназначенные в первую очередь для работы в регулируемых ЭП. В частности, эти двигатели имеют встроенный датчик скорости – тахогенератор и ориентированы на питание от тиристорных преобразователей.
Усовершенствование двигателей постоянного тока привело к разработке новой серии 4П, рассчитанной на напряжения 110 и 220 В, со скоростями вращения от 750 до 3000 об/мин и номинальными моментами от 2 до 15000 Н*м с улучшенными удельными энергетическими показателями, динамическими и виброакустическими свойствами. Кроме того, трудоемкость их изготовления по сравнению с серией 2П снижена в 2,3 …3 раза при уменьшении расхода меди на 25…30 %.
Для ЭП ряда рабочих машин и механизмов выпускаются специализированные серии ДПТНВ. Для ЭП металлорежущих станков помимо 2П и 4П применяются двигатели серий ПБСТ и ПГТ (с гладким якорем), а также высокомоментные двигатели серий ПБВ, ДК1и ДК2 с возбуждением от постоянных магнитов.
Для крановых механизмов выпускаются двигатели серии Д с независимым и последовательным возбуждением, исполнение которых максимально учитывает условия их работы и предъявляемые к ним требования. Для краново-металлургических ЭП применяются также двигатели с независимым, последовательным и смешанным возбуждением серий ДП.
Специализированные серии ДПТ выпускаются и для металлургического производства (например, прокатные двигатели серий НП и ПП), текстильной промышленности и ряда других отраслей народного хозяйства.
c. Регулируемый электропривод переменного тока
ЭП с трехфазным асинхронным двигателем (АД) является самым массовым видом привода в промышленности, коммунальном и сельском хозяйстве. Такое положение определяется простотой изготовления и эксплуатации АД, меньшими по сравнению с ДПТ массой, габаритными размерами и стоимостью, а также высокой надежностью в работе.
В основную общепромышленную серию 4А входят АД с мощностью от 0,06 до 400 кВт и высотами осей вращения от 50 до 355 мм, которые выпускаются самых различных модификаций и конструктивных исполнений: с повышенными пусковым моментом и скольжением; с фазным ротором; встраиваемые; малошумные; со встроенной температурной защитой; с электромагнитным тормозом; с подшипниками скольжения; химостойкие. АД различаются также по климатическому исполнению и категории размещения. Для комплектации ЭП большой мощности выпускаются АД серий АН-2 (мощностью до 2000кВт), АВ (мощностью до 8000 кВт), ДАЗО (мощностью до 1250 кВт) и ряд других.
Основной областью применения АД вплоть до недавнего времени являлся нерегулируемый ЭП. В последние годы в связи с разработкой и серийным выпуском электротехнической промышленностью тиристорных преобразователей частоты и напряжения стали создаваться регулируемые асинхронные ЭП с характеристиками, не уступающими по своим показателям ЭП постоянного тока. Применение таких ЭП в силу преимуществ АД отражает прогрессивную тенденцию развития автоматизированных ЭП.
Синхронные трехфазные двигатели (СД) широко применяются в ЭП самых разнообразных рабочих машин и механизмов, что объясняется их высокими технико-экономическими показателями. СД имеют высокий коэффициент мощности cos φ, близкий к единице или даже опережающий. Способность СД работать с опережающим cos φ и отдавать при этом в сеть реактивную мощность позволяет улучшать режим работы и экономичность системы электроснабжения. КПД современных СД составляет 96…98 %, что на 1…1,5 % выше КПД АД с теми же габаритными размерами и скоростью. В СД возможно регулирование перегрузочной способности посредством регулирования тока возбуждения, причем она меньше зависит от напряжения сети, чем в АД. СД обладает абсолютно жесткой механической характеристикой. Важным преимуществом конструкции СД является наличие большого воздушного зазора, вследствие чего его характеристики и свойства мало зависят от износа подшипников и неточности монтажа ротора.
d. Переходные процессы в электроприводе

Переходные процессы в ЭП возникают при регулировании угловой скорости вращения, пуске, торможении, изменении нагрузки на валу ЭД, при этом нарушается равенство М=
 соответственно изменяется угловая скорость вращения ω = var. Динамический процесс может быть представлен в виде классического уравнения двигателя ЭП.
соответственно изменяется угловая скорость вращения ω = var. Динамический процесс может быть представлен в виде классического уравнения двигателя ЭП.
Одновременно с изменением угловой скорости изменяются и моменты, действующие в ЭП и температура двигателя. Анализ переходных процессов в ЭП может разделить на 2 основных направления:
1-анализ электромеханических переходных процессов
2-анализ тепловых переходных процессов
Часть №2
e. Факторы, определяющие выбор мощности двигателя
Выбор мощности двигателя является одним из основных этапов проектирования электропривода. Надежная и экономичная работа привода возможна только при соответствии двигателя тем режимам, в которых он должен работать, и ожидаемой нагрузке.
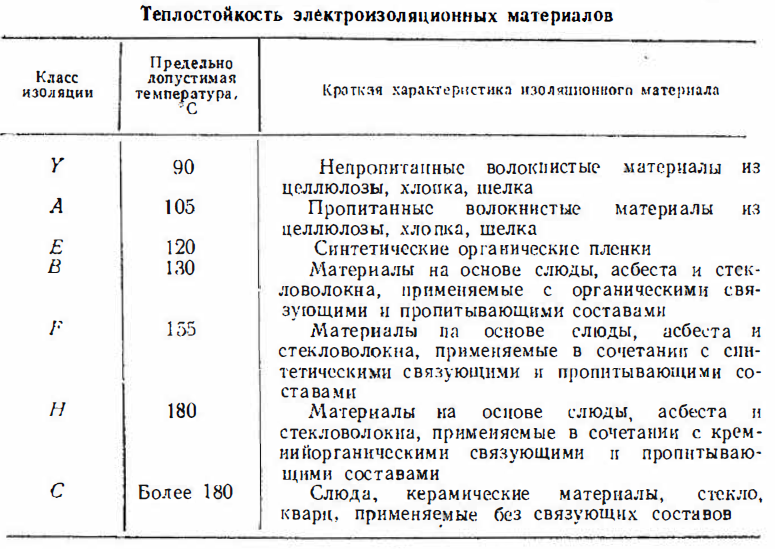
Определяющими при выборе мощности двигателя являются нагрев его обмоток и возможные мгновенные перегрузки. В процессе работы двигателя в его обмотках и магнитной системе возникают потери энергии, которые приводят к повышению температуры двигателя. Наименее теплостойкой частью двигателя является изоляция проводников обмотки. При повышении температурой предельно допустимых значений происходит ускоренное старение изоляции и выход ее из строя. Предельно допустимая температура, естественно, определяется физико-химическими свойствами материалов, из которых выполнена изоляция. Согласно ГОСТ 8865-87 электроизоляционные материалы по теплостойкости разделяются на классы и для каждого из них определены предельно допустимые температуры (таблица 1). В настоящее время в электрических машинах в основном применяется изоляция классов E, B иF.
Таблица 1
Завышение мощности двигателя по сравнению с необходимой также не желательно. Двигатель большей мощности соответственно имеет увеличенные габариты и момент инерции; при этом при тех же условиях его использования переходные процессы будут затянуты. Также возрастут потери в двигателе, а следовательно, расход энергии. Недогруженный асинхронный двигатель будет работать с пониженным коэффициентом мощности, что приведет к дополнительным потерям энергии.