Файл: Расчёт и проектирование привода конвейера с одноступенчатым редуктором.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 07.11.2023
Просмотров: 41
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

МИНОБРНАУКИ РОССИИ
федеральное государственное бюджетное образовательное учреждение высшего образования
Московский государственный технологический университет
«СТАНКИН»
(ФГБОУ ВО «МГТУ «СТАНКИН»)
Институт производственных технологий и инжиниринга

Кафедра станков
РАСЧЁТНО-ПОЯСНИТЕЛЬНАЯ
ЗАПИСКА К КУРСОВОМУ ПРОЕКТУ
по дисциплине
«ОСНОВЫ КОНСТРУИРОВАНИЯ МАШИН»
на тему:
«Расчёт и проектирование привода конвейера с одноступенчатым
редуктором»
Задание №1 Вариант № 5
Студент: Бублик А.В. /_____________/ Группа: МДБ-19-05
Руководитель от кафедры: доц. /________________/
Москва 2022
МИНОБРНАУКИ РОССИИ
федеральное государственное бюджетное образовательное учреждение высшего образования
Московский государственный технологический университет
«СТАНКИН»
(ФГБОУ ВО «МГТУ «СТАНКИН»)

Институт производственных технологий и инжиниринга
Кафедра станков
ЗАДАНИЕ НА КУРСОВОЙ ПРОЕКТ
по дисциплине
«ОСНОВЫ КОНСТРУИРОВАНИЯ МАШИН»
на тему: Расчет и проектирование привода конвейера с одноступенчатым косозубым редуктором
Задание № 1 Вариант № 5
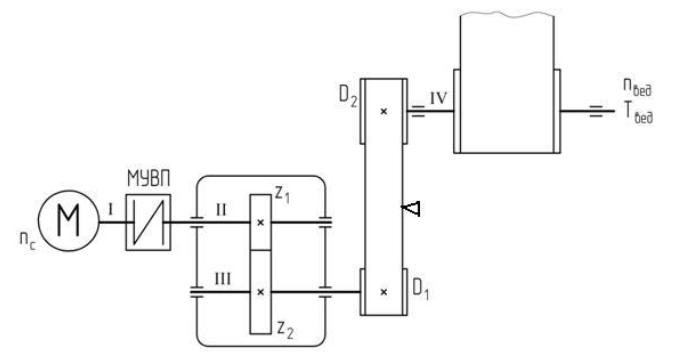
Кинематическая схема
Исходные данные:
-
Крутящий момент на ведущем валу конвейера Tвед = 85 Н*м -
Частота вращения ведущего вала конвейера nвед= 600 мин-1 -
Синхронная частота электродвигателя nc = 1500 мин-1 -
Тип передачи (или муфты) на входе: МУВП -
Тип передачи (или муфты) на выходе: клиноременная -
Срок службы редуктора: tч= 10*103 час -
Дополнительные условия:
Расположение ременной передачи – вертикальное.
Расположение осей валов редуктора – в вертикальной плоскости.
Оглавление
Исходные данные: 2
1.Кинематический расчет привода 4
2.Расчёт передач 6
2.1.Проектировочный расчет цилиндрической косозубой передачи 6
2.2.Расчёт цепной передачи 8
3.Техническое описание конструкции редуктора 11
3.1.Техническое описание конструкции опорного узла входного вала 11
3.2.Техническое описание конструкции опорного узла выходного вала 12
3.3.Техническое описание конструкции крышки подшипника 13
4.Проверочный расчёт выходного вала 16
4.1.Пространственная схема нагрузок, действующих на валы редуктора 16
4.2.Определение опасных сечений вала 16
4.4.Расчёт опасного сечения вала на статическую и усталостную прочность 18
5. Расчет опасного сечения выходного вала на сопротивление усталости 19
6.Проверочный расчёт подшипников выходного вала на долговечность 20
7.Проверочный расчёт шпоночных соединений на выходном валу 21
Список литературы 24
-
Кинематический расчет привода
Определение мощности на ведущем валу конвейера
Рвед =
 =
=
Определение потребной мощности на валу двигателя
Рпотр =
 кВт
кВтηобщ = ηмуф∙ηцил∙ ηцепь∙ η3подш = 0,876;
где, ηмуф=0,99; ηцил=0,94; ηрем=0,98; ηподш=0,99.
Выбор электродвигателя
По потребляемой мощности Р потр = 6,08 кВт и заданной синхронной частоте вращения
 по каталогу выбираем электродвигатель 4А 112Μ4/1455, у которого номинальная мощность Pн = 5,5 кВт а асинхронная (номинальная) частота вращения
по каталогу выбираем электродвигатель 4А 112Μ4/1455, у которого номинальная мощность Pн = 5,5 кВт а асинхронная (номинальная) частота вращения 
Проверка электродвигателя на перегрузку мощности
Поскольку потребная мощность
 превышает номинальную мощность
превышает номинальную мощность 
, выполняется проверка электродвигателя на перегрузки
ΔР =
Допускаемая перегрузка

Условие
 выполняется .
выполняется .Определение общего передаточного числа
Uобщ =

Назначение чисел зубьев отдельных передач
По табл. П3, П4 передаточные числа отдельных передач:
- для цилиндрической косозубой передачи
Umin = 1, Umax = 4…5, Uреком = 1,6…3,15
- для цепной передачи
Umin = 1, Umax = 2…2,5, Uреком = 1…1,6.
Принимаем:
Uрем = 1,12.
Тогда Uцил =
 =
=  = 2,16.
= 2,16.Назначение чисел зубьев зубчатых колёс и диаметров шкивов ременной передачи
Принимаем Z1=26, тогда Z2=26*2.16=56,16 Принимаем Z2=56
Uцил =
Принимаем ????1=200 мм, тогда ????2 = 160∙1,12 = 224 мм.
Принимаем ????2 =224 мм. Uрем =
Определение действительной частоты вращения ведущего вала конвейера и погрешности частоты вращения ведущего вала конвейера
Действительную частоту вращения ведущего вала конвейера nведдейств определяем из
уравнения кинематического баланса (скольжение ремня не учитываем):
nведдейств = nном∙
 (мин-1)
(мин-1)Δn =

Δnр< 2%, погрешность допустимая
Определение кинематических параметров на валах привода
| Мощность, Рi, кВт Р1 = Рпотр =6,08 Р2 =  6,08 6,08 Р3 =  Р4 =  | Частота вращения, ni, мин-1 n1 = nn =1455  n2 =n1  n3 =n2*  n4 = n3 ∗  =603,15 =603,15 |
| Вращающий момент, Ti, Н∙м Т1 =  Н∙м Н∙мТ2 =  Т3 =  Н∙м. Н∙м.Т4 =  | Наименьший диаметр вала, di, мм di =  dI = 38 мм (по табл. П9) – вал электродвигателя. d2 =  d3 =  d4 =  |
Полученные значения найденных параметров приведены в таблице балансов (табл. 1)
Таблица 1
| Валы | Частота вращения, ni, мин-1 | Мощность, Рi, кВт | Вращающий момент, Ti, Н∙м | Наименьший диаметр вала, di, мм |
| I | 1455 |  | 39,9 |  |
| II | 1455 |  | 38,6 |  |
| III | 675,5 |  |  |  |
| IV | 603,15 |  |  | |
-
Расчёт передач
-
Проектировочный расчет цилиндрической косозубой передачи
-
Определение предварительного модуля
 , исходя из контактной выносливости рабочих поверхностей зубьев шестерни контактной выносливости рабочих поверхностей зубьев шестерни
, исходя из контактной выносливости рабочих поверхностей зубьев шестерни контактной выносливости рабочих поверхностей зубьев шестерни =
=  = 1,72 мм
= 1,72 ммЗдесь ????1 = 80 (
 ) для прямозубых.
) для прямозубых. ????ш = ????1 = 26 - число зубьев шестерни.
????′= Т2=38,6 Нм −крутящий момент на валу шестерни.
Uпрям =
 =
=  = 2,15 – передаточное число зубчатой передачи.
= 2,15 – передаточное число зубчатой передачи.Предварительно принимаем коэффициент ширины венца
 = 0,4.
= 0,4. В качестве материала зубчатой пары выбираем Сталь 40Х, в качестве термообработки – закалка. Тогда |
 | = 900 MПа.
| = 900 MПа. Определение предварительного модуля
 , исходя из изгибной выносливости зубьев шестерни
, исходя из изгибной выносливости зубьев шестерни =
=  =
=  = 2,26 мм
= 2,26 ммЗдесь ????2 = 2,4-для прямозубых зубьев.
|????????????|= 170 MПа для выбранных ранее материала зубчатой пары и вида термообработки при принимаемой реверсивной нагрузке.
По большему из двух полученных значений модуля ????(Н)предв и ????(????)предв выбираем
ближайшее большее стандартное значение модуля m = 2,25 мм.
Проверочный расчёт цилиндрической косозубой передачи
Определение действительного контактного напряжения σН.
 *
* ≤
≤
 *
* = 558,58
= 558,58 ≤
≤ К3 = 670 (МПа ) для прямозубых
Условие прочности
= 558,58 MПа < |????????| =900 MПа выполняетсяОпределение действительного изгибного напряжения σF.
 =
= *
* ≤
≤