Файл: Пояснительная записка Соискатель, студент группы элб16 Догадин Р. А.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 07.11.2023
Просмотров: 143
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
1 Устройство и принцип работы лабораторного стенда «Интеграл»
2 Математическое описание объектов лабораторного стенда «Интеграл»
преобразователь частоты – асинхронный двигатель (ПЧ – АД)
3 Моделирование режимов работы частотно-регулируемого
электропривода в пакете программ MatLab
4 Пуск асинхронного двигателя на лабораторном стенде «Интеграл»
5 Техника безопасности при работе с лабораторным стендом «Интеграл»
где ψ0(|????0|) – нелинейная функция (характеристика намагничивания,

определяющая связь между модулем |ψ0| результирующего вектора главных

потокосцеплений ψ0 и модулем |????0| результирующего вектора

намагничивающих токов ????0.
В некоторых случаев для вычисления индуктивности целесообразно использовать выражение
????0(|ψ0|) =
 ,
, ????0(|ψ0|)

где ????0(|ψ0|) – обратная по отношению ψ0(|????0|) нелинейная функция.
Представленные выше уравнения могут быть использованы для анализа как переходных, так и установившихся режимов.
При анализе установившихся режимов на переменной частоте питающего напряжения (f1 ≠ const) примем в системе уравнений (2.1) скорость ????к = ????0э = 2 ∙ ???? ∙ ????1, а производные равными нулю, тогда получим следующую модель, описывающую установившийся режим работы двигателя:
????
 ;
; 
ψ1 = ψ0 + ψ1????;

ψ2 = ψ0 + ψ2????;
(2.11)

????0 = ????1 + ????2;
????
???? = ????с.
Исходя из уравнений установившегося режима строим схему замещения асинхронного электродвигателя при переменном значении частоты источника питания f1. Для этого в уравнениях электрического равновесия напряжений пренебрежем результирующими векторами полных потокосцеплений обмоток

статора ψ1 и ротора ψ2. В полученных уравнениях выразим результирующие

векторы главных потокосцеплений ψ0 и потокосцеплений рассеяния обмоток

статора ψ1???? и ротора ψ2???? через результирующие токи соответственно ????0, ????1 и ????2.
После этого получим уравнения следующего вида:
????
 ;
; (2.12)
????2

????
где ???? = ????
 ????0−0???? = ????0????э−0э????э – скольжение; ????0
????0−0???? = ????0????э−0э????э – скольжение; ????0 Системе уравнений (2.12) соответствует схема замещения асинхронного двигателя при переменной частоте питающего напряжения, приведенная на русинке 2.1.
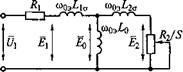
Рисунок 2.1 – Схема замещения асинхронного двигателя при переменной частоте питающего напряжения
Учтем насыщение асинхронного двигателя в схеме с помощью переменного
коэффициента L0, являющегося функцией тока намагничивания |????0|.
Наведенные в электромагнитных контурах ЭДС можно записать следующим образом:
????
 ;
; ????
 ;
; ????
 ;
; Представленная на рисунке 2.1 схема замещения может быть использована при анализе установившихся режимов асинхронного двигателя при частотном способе регулирования угловой скорости.
В системах асинхронных электроприводов с регулированием напряжения основной гармоники переменного напряжения или добавочного сопротивления в роторе частота питающего напряжения остается неизменной и равной номинальному значению. Для следующих случаев уравнения статических режимов приобретают следующий вид:
????
 ; (2.13)
; (2.13) при ????1 = ????0э.ном ∙ ????1????; ????′2 = ????0э.ном ∙ ????2????; ????0 = ????0э.ном ∙ ????0; ????1, ????′2 – индуктивные сопротивления рассеяния обмоток соответственно статора и ротора; ????0 – индуктивное сопротивление контура намагничивания.

В уравнениях статических режимов (2.13) с помощью ????′2, ????′2, ????′2 обозначены параметры ротора, приведенные к параметрам обмотки статора, а
выражение ????0 ∙ ????0 представляет собой ЭДС контура намагничивания:
????
 .(2.14)
.(2.14) С учетом (2.14) система уравнений (1.15) будет представлять собой систему уравнений статического режима работы асинхронного двигателя при f1 = f1ном, которому соответствует Т-образная схема замещения, представленная на рисунке 2.1.
Обычно для облегчения процедуры анализа статических режимов используют Г-образную схему замещения, для этого подключают контур намагничивания к зажимам питающего напряжения. Это не вносит существенных погрешностей в расчеты. Г-образная схема замещения асинхронного электродвигателя в статических режимах приведена на рисунке
2.2. В такой схеме ток ????0 = ????1/????0 остается в процессе работы двигателя постоянным и не зависит от скорости (скольжения) двигателя.
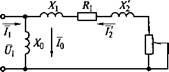
Рисунок 2.2 – Г-образная схема замещения асинхронного двигателя в статических режимах
Приведенные при f1 = f1ном уравнения статических режимов (2.13) и схема замещения, представленная на рисунке 2.2, могут быть использованы для исследования свойств и характеристик асинхронного электропривода, как при регулировании напряжения U1, подводимого к статору, так и при регулировании добавочных сопротивлений ротора R2доб. Это реализуется в асинхронных двигателях с контактными кольцами, для чего в схеме замещения вместо ????′
2 используется значение ????′2∑ = ????′2 + ????′2доб. Для двигателей с короткозамкнутым ротором ????′2∑ = ????′2. Тогда ток ротора
????1
????
(2.15)
При известном токе ротора можно определить статорный ток:
????
где ????1ном и ????′2ном – соответственно номинальный ток статора, приведенный номинальный ток ротора.
Выражение (2.16) может быть преобразовано следующим образом:
 2 = ????02 + (????12ном − ????02) ∙ ???? ∙ ???? ,(2.17)
2 = ????02 + (????12ном − ????02) ∙ ???? ∙ ???? ,(2.17) ????1
????ном ∙ ????ном
где ????ном и ????ном – соответственно номинальный момент и скольжение двигателя.
Момент двигателя
????
 .(2.18)
.(2.18) Называемый критическим максимальный момент двигателя
????к
 .(2.19)
.(2.19) Критическое скольжение, соответствующее критическому моменту,
????′2∑
????к
В формулах 2.19 и 2.20 знак «+» соответствует двигательному режиму работы двигателя, а знак «–» тормозному. Используя данные формулы можно получить уточненную формулу Клосса для записи зависимости момента асинхронного двигателя от скольжения:
| 2 ∙ ????к ∙ (1 + ???? ∙ ????к) ???? =  , , ???? ????к + 2 ∙ ???? ∙ ????к + ????к ???? ???? где ???? = 1⁄????′2∑. | (2.21) |
В ряде случаев используют упрощенную формулу Клосса, приняв a = 0. Тогда
2 ∙ ????к
???? =
 ,(2.22)
,(2.22) ???? + ????к
????к ????
Математическое описание переходных и установившихся процессов в асинхронном двигателе показывает, что управляющими воздействиями, изменяющими характеристики двигателя, являются амплитуда (или среднеквадратичное значение) переменного напряжения питания, частота и амплитуда переменного напряжения
, подаваемого на статор, общее активное сопротивление цепей ротора (для двигателей с фазным ротором, когда возможно изменение величины дополнительного сопротивления Ротора).
Вывод: управляющими воздействиями, изменяющими параметры асинхронного двигателя, являются амплитуда (или действующее значение) переменного питающего напряжения, частота и амплитуда переменного напряжения, подводимого к статору.
В современных системах электропривода регулирование указанных параметров производится с использованием различных типов полупроводниковых преобразователей, поэтому исходные выражения должны быть дополнены математическим описанием и моделями рассматриваемых типов преобразователей с учетом систем управления ими, что позволит анализировать процессы в системе «преобразователь – асинхронный двигатель».