Файл: Отчет по производственной практике место прохождения практики Ульяновский государственный технический университет.docx
Добавлен: 09.11.2023
Просмотров: 243
Скачиваний: 8
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
,  - сопротивления обмотки якоря,
- сопротивления обмотки якоря,  - добавочное сопротивление в цепи якоря;
- добавочное сопротивление в цепи якоря;  - электромагнитный момент, Нм;
- электромагнитный момент, Нм;  ток якоря, А;
ток якоря, А;  - угловая скорость вращения двигателя, рад/с;
- угловая скорость вращения двигателя, рад/с;  - ЭДС вращения якоря, В;
- ЭДС вращения якоря, В;  и
и  - коэффициенты пропорциональности;
- коэффициенты пропорциональности;  - постоянная ДПТ (
- постоянная ДПТ (  - число пар полюсов;
- число пар полюсов; 
 - число активных проводников обмотки якоря;
- число активных проводников обмотки якоря;  - число пар параллельных ветвей обмотки якоря );.
- число пар параллельных ветвей обмотки якоря );.
При использовании системы СИ имеет место численное равенство коэффициентов пропорциональности, которые можно обозначить :
:  , где
, где  - конструктивный коэффициент двигателя,
- конструктивный коэффициент двигателя, 
- магнитный поток, Вб.
Решая совместно первые два уравнения в системе (3.1) можно получить уравнение электромеханической характеристики ДПТ, которое определяет зависимость :
:
 (3.2)
(3.2)
Анализ уравнений электромеханической характеристики
Скорость холостого хода
При имеет место режим идеального холостого хода и при этом
имеет место режим идеального холостого хода и при этом
 (3.3)
(3.3)
Ток короткого замыкания
С увеличением нагрузки на валу ДПТ возрастает и ток якоря , т.к.
, т.к.  , а это в свою очередь ведет к снижению
, а это в свою очередь ведет к снижению  . Если к якорю подведено напряжение, то при
. Если к якорю подведено напряжение, то при  имеет место режим короткого замыкания, при котором, как следует из (3.2), ток короткого замыкания (называемый также пусковым током)
имеет место режим короткого замыкания, при котором, как следует из (3.2), ток короткого замыкания (называемый также пусковым током)
 . (3.4)
. (3.4)
Максимальное значение тока короткого замыкания имеет место при , когда
, когда  , и оно может в десятки раз превышать величину номинального значения
, и оно может в десятки раз превышать величину номинального значения  тока якоря двигателя, т. к.
тока якоря двигателя, т. к.  величина сравнительно малая.
величина сравнительно малая.
Реально режим короткого замыкания имеет место кратковременно, при пуске двигателя и при стопорении двигателя моментом сопротивления.
Ограничение величины
При прямом пуске двигателя значения тока , поэтому якорная обмотка может быстро перегреться и выйти из строя. Кроме того, большие токи негативно влияют и на работоспособность щеточно-коллекторного узла.
, поэтому якорная обмотка может быстро перегреться и выйти из строя. Кроме того, большие токи негативно влияют и на работоспособность щеточно-коллекторного узла.
Это обуславливает необходимость ограничения до допустимой величины либо введением дополнительного сопротивлений в якорную цепь  , либо уменьшением значения питающего напряжения
, либо уменьшением значения питающего напряжения  .
.
Величина максимально допустимого тока определяется коэффициентом перегрузки по току
определяется коэффициентом перегрузки по току
 , (3.5)
, (3.5)
обычно принимающим значения от 2 до 5, в зависимости от типа двигателя.
Максимально допустимый ток короткого замыкания должен соответствовать неравенству
 . (3.6)
. (3.6)
Для микродвигателей обычно осуществляется прямой пуск без добавочных сопротивлений, но с ростом габаритов ДПТ необходимо производить реостатный пуск, особенно если привод с ДПТ используется в напряженных режимах с частыми пусками и торможениями.
Практически следует помнить, что, если не ограничивать пусковые токи, то частыми пусками можно сжечь обмотку якоря ДПТ.
С введением в цепь якоря жесткость электромеханической характеристики уменьшается, что и видно на рис. 3.2.
Динамическое торможение
Для осуществления данного режима якорь двигателя отключают от сети и замыкают на тормозное сопротивление
так как это представление на рис. 3.8.
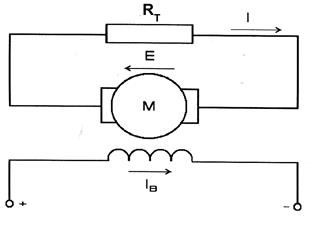
Рис.3.8. Схема включения ДПТ с НВ при динамическом торможении.
Уравнение механической характеристики для этого режима запишется как
 , (3.12)
, (3.12)
где - тормозной момент.
- тормозной момент.
Ток якоря можно определить как
 . (3.13)
. (3.13)
т. е. ток (и, следовательно, момент двигателя) изменяет свой знак, чем и обуславливается процесс торможение.
На рис. 3.9 представлены механические характеристики ДПТ с НВ, соответствующие режиму динамического торможения.
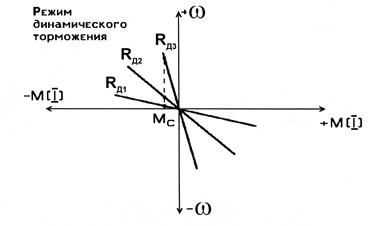
Рис. 3.9. Механические характеристики ДПТ с НВ, соответствующие режиму динамического торможения при <
<  <
<  .
.
Способ динамического торможения весьма экономичен, т. к. двигатель работает генератором на постоянную нагрузку, потребляя из сети энергию только на электромагнитное возбуждение.
При переводе ДПТ из двигательного режима в режим динамического торможения необходимо ограничивать величину максимального тормозного тока в момент переключения.
Данный вид торможения имеет место при превышении активным моментом сопротивления величины пускового момента, что приводит к изменению направления вращения якоря двигателя и соответственно знака ЭДС. Из первого уравнения системы (3.1) следует, что в этом случае ток якоря определяется как
 , (3.14)
, (3.14)
т. е. ток якоря превышает значения токов короткого замыкания (3.4). Поэтому для реализации этого режима необходимо ограничивать ток якоря введением добавочного сопротивления .
.
Графически механические и электромеханические характеристики в этом случае являются продолжением соответствующих характеристик в 4 квадрант.
Режим тормозного спуска широко применяется в грузоподъемных механизмах для опускания грузов.
Противовключение изменением полярности подводимого напряжения
Если у ДПТ, работающего в двигательном режиме на ходу изменить полярность напряжения на обмотке якоря на противоположную, то знак тока якоря изменится на противоположный в соответствии с выражением
 . (3.15)
. (3.15)
Двигатель переходит в тормозной режим, и его механическая характеристика изображается во 2 квадранте. При этом происходит интенсивное торможение и скорость вращения двигателя падает до нуля. Если в этот момент времени обмотку якоря не отключить от сети, то направление вращения изменяйся на противоположное (график механической характеристики размещен в 3 квадранте), т.е. двигатель реверсируется. Это, безусловно, накладывает определенные ограничения на применимость данного способа торможения.
С энергетической точки зрения данный способ не экономичен, т.к. большое количество энергии выделяется на добавочном сопротивлении, которое необходимо включать в якорную цепь для ограничения бросков тормозного тока.
- постоянная ДПТ ( При использовании системы СИ имеет место численное равенство коэффициентов пропорциональности, которые можно обозначить
- магнитный поток, Вб.
Решая совместно первые два уравнения в системе (3.1) можно получить уравнение электромеханической характеристики ДПТ, которое определяет зависимость
(3.2)Анализ уравнений электромеханической характеристики
Скорость холостого хода
При
(3.3)Ток короткого замыкания
С увеличением нагрузки на валу ДПТ возрастает и ток якоря
. (3.4)Максимальное значение тока короткого замыкания имеет место при
Реально режим короткого замыкания имеет место кратковременно, при пуске двигателя и при стопорении двигателя моментом сопротивления.
Ограничение величины
При прямом пуске двигателя значения тока
Это обуславливает необходимость ограничения
Величина максимально допустимого тока
, (3.5)обычно принимающим значения от 2 до 5, в зависимости от типа двигателя.
Максимально допустимый ток короткого замыкания должен соответствовать неравенству
Для микродвигателей обычно осуществляется прямой пуск без добавочных сопротивлений, но с ростом габаритов ДПТ необходимо производить реостатный пуск, особенно если привод с ДПТ используется в напряженных режимах с частыми пусками и торможениями.
Практически следует помнить, что, если не ограничивать пусковые токи, то частыми пусками можно сжечь обмотку якоря ДПТ.
С введением
Динамическое торможение
Для осуществления данного режима якорь двигателя отключают от сети и замыкают на тормозное сопротивление
так как это представление на рис. 3.8.
Рис.3.8. Схема включения ДПТ с НВ при динамическом торможении.
Уравнение механической характеристики для этого режима запишется как
, (3.12)где
Ток якоря можно определить как
. (3.13)т. е. ток (и, следовательно, момент двигателя) изменяет свой знак, чем и обуславливается процесс торможение.
На рис. 3.9 представлены механические характеристики ДПТ с НВ, соответствующие режиму динамического торможения.
Рис. 3.9. Механические характеристики ДПТ с НВ, соответствующие режиму динамического торможения при
Способ динамического торможения весьма экономичен, т. к. двигатель работает генератором на постоянную нагрузку, потребляя из сети энергию только на электромагнитное возбуждение.
При переводе ДПТ из двигательного режима в режим динамического торможения необходимо ограничивать величину максимального тормозного тока в момент переключения.
- 1 2 3 4 5
Тормозной спуск
Данный вид торможения имеет место при превышении активным моментом сопротивления величины пускового момента, что приводит к изменению направления вращения якоря двигателя и соответственно знака ЭДС. Из первого уравнения системы (3.1) следует, что в этом случае ток якоря определяется как
, (3.14)т. е. ток якоря превышает значения токов короткого замыкания (3.4). Поэтому для реализации этого режима необходимо ограничивать ток якоря введением добавочного сопротивления
Графически механические и электромеханические характеристики в этом случае являются продолжением соответствующих характеристик в 4 квадрант.
Режим тормозного спуска широко применяется в грузоподъемных механизмах для опускания грузов.
Противовключение изменением полярности подводимого напряжения
Если у ДПТ, работающего в двигательном режиме на ходу изменить полярность напряжения на обмотке якоря на противоположную, то знак тока якоря
. (3.15)Двигатель переходит в тормозной режим, и его механическая характеристика изображается во 2 квадранте. При этом происходит интенсивное торможение и скорость вращения двигателя падает до нуля. Если в этот момент времени обмотку якоря не отключить от сети, то направление вращения изменяйся на противоположное (график механической характеристики размещен в 3 квадранте), т.е. двигатель реверсируется. Это, безусловно, накладывает определенные ограничения на применимость данного способа торможения.
С энергетической точки зрения данный способ не экономичен, т.к. большое количество энергии выделяется на добавочном сопротивлении, которое необходимо включать в якорную цепь для ограничения бросков тормозного тока.