Файл: Электропривод (ЭП) с трехфазным асинхронным двигателем (АД) является самым массовым видом привода в промышленности, коммунальном и сельском хозяйстве.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 09.11.2023
Просмотров: 9234
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Двигатели с глубокими пазами.
Как показано на рис.3.25, паз ротора выполнен в виде узкой щели, глубина которой примерно в 10 раз больше, чем ее ширина. В эти пазы-щели укладывается обмотка в виде узких медных полос. Распределение магнитного потока показывает, что индуктивность и индуктивное сопротивление в нижней части проводника значительно больше, чем в верхней части.
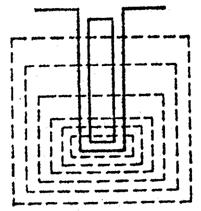
Рис.3.25
Поэтому при пуске ток вытесняется в верхнюю часть стержня и активное сопротивление значительно увеличивается. По мере разгона двигателя скольжение уменьшается, и плотность тока по сечению становится почти одинаковой.
В целях увеличения эффекта вытеснения тока глубокие пазы выполняются не только в виде щели, но и трапецеидальной формы. В этом случае глубина паза несколько меньше, чем при прямоугольной форме.
Двигатели с двойной клеткой.
В таких двигателях обмотки ротора выполняются в виде двух клеток (рис.3.26): во внешних пазах 1 размещается обмотка из латунных проводников, во внутренних 2 – обмотка из медных проводников.

Рис.3.26
Таким образом, внешняя обмотка имеет большее активное сопротивление, чем внутренняя. При пуске внешняя обмотка сцепляется с очень слабым магнитным потоком, а внутренняя – сравнительно сильным полем. В результате ток вытесняется во внешнюю клетку, а во внутренней тока почти нет.
По мере разгона двигателя ток из внешней клетки переходит во внутреннюю и при s =sНОМ протекает в основном по внутренней клетке. Ток во внешней клетке при этом сравнительно небольшой.
Результирующий пусковой момент, складывающийся из моментов от двух клеток, значительно больше, чем у двигателей нормальной конструкции, и несколько больше, чем у двигателей с глубоким пазом. Однако следует иметь в виду, что стоимость двигателей с двойной клеткой ротора выше.
Пуск переключением обмотки статора.
Если при нормальной работе двигателя фазы статора соединены в треугольник, то, как показано на рис.3.27, при пуске первоначально они соединяются в звезду.
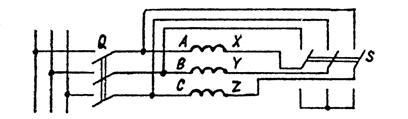
Рис.3.27
Для этого сначала включается выключатель Q, а затем переключатель S ставится в нижнее положение Пуск. В таком положении концы фаз Х, Y, Z соединены между собой, т.е. фазы соединены звездой. При этом напряжение на фазе в √3 раз меньше линейного.
В результате линейный ток при пуске в 3 раза меньше, чем при соединении треугольником. При разгоне ротора в конце пуска переключатель S переводится в верхнее положение и, как видно из рис. 3.27, фазы статора пересоединяются в треугольник.
Недостатком этого способа является то, что пусковой момент также уменьшается в 3 раза, так как момент пропорционален квадрату фазного напряжения, которое в √3 раз меньше при соединении фаз звездой. Поэтому такой способ применим при небольшом нагрузочном моменте и только для двигателей, нормально работающих при соединении обмоток статора в треугольник.
Пуск при включении добавочных резисторов в цепь статора.(рис. 3.28)
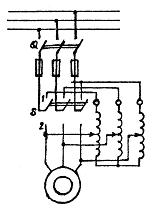
Рис.3.28
Перед пуском выключатель (пускатель) находится в разомкнутом состоянии и замыкается выключатель Q1.
При этом в цепь статора включены добавочные резисторы RДОБ. В результате обмотка статора питается пониженным напряжением U1n = U1НОМ – InRДОБ. После разгона двигателя замыкается выключатель Q2 и обмотка статора включается на номинальное напряжение U1НОМ. Подбором RДОБ можно ограничить пусковой ток до допустимого.
Следует иметь в виду, что момент при пуске, пропорциональный U21П, будет меньше и составляет (U1П / U1НОМ)2 номинального. Важно отметить, что при этом способе пуска значительны потери в сопротивлении RДОБ (RДОБI21n). Можно вместо резисторов RДОБ включить катушки с индуктивным сопротивлением ХДОБ, близким к RДОБ.
Применение катушек позволяет уменьшить потери в пусковом сопротивлении.
Автотрансформаторный пуск.
Кроме указанных способов можно применить так называемый автотрансформаторный пуск.
Соответствующая схема показана на рис.3.29.
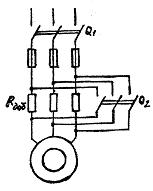
Рис.3.29
Перед пуском переключатель S устанавливается в положение 1, а затем включается автотрансформатор и статор питается пониженным напряжением U1П. Двигатель разгоняется при пониженном напряжении и в конце разгона переключатель S переводится в положение 2 и статор питается номинальным напряжением U1ном.
Если коэффициент трансформации понижающего трансформатора n, тогда ток I на его входе будет в n раз меньше. Кроме того, пусковой ток будет также в n раз меньше, т.е. ток при пуске в сети будет в n2 раз меньше, чем при непосредственном пуске.
Этот способ, хотя и лучше рассмотренных в п.3.14.7, но значительно дороже.
Пуск двигателя с фазным ротором.
Пуск двигателя с фазным ротором осуществляется путем включения пускового реостата в цепь ротора, как это показано на рис.3.30.
Начала фаз обмоток ротора присоединяются к контактным кольцам и через щетки подключаются к пусковому реостату с сопротивлением Rp.
Приведенное к обмотке статора сопротивление пускового реостата Rp рассчитывается так, чтобы пусковой момент был максимальный, т.е. равен критическому. Так как при пуске скольжение sП = 1, то sП = 1 = sК , равенство МП = М Пmaх = МК будет обеспечено. Тогда
 .
.Пуск двигателя происходит по кривой, показанной на рис.3.31. В момент пуска рабочая точка на механической характеристике находится в положении а, а при разгоне двигателя она перемещается по кривой 1, соответствующей полностью включенному реостату.
При моменте, соответствующем точке е , включается первая ступень реостата и момент скачком увеличивается до точки b – рабочая точка двигателя переходит на кривую 2; в момент времени, соответствующей точке d, выключается вторая ступень реостата, рабочая точка скачком переходит в точку
с и двигатель выходит на естественную характеристику 3 и затем в точку f. Реостат закорачивается, обмотка ротора замыкается накоротко, а щетки отводятся от колец.
Таким образом, фазный ротор позволяет пускать в ход асинхронные двигатели большой мощности при ограниченном пусковом токе. Однако этот способ пуска связан со значительными потерями в пусковом реостат .
Кроме того, двигатель с фазным ротором дороже двигателя с короткозамкнутым ротор Поэтому двигатель с фазным ротором применяется лишь при больших мощностях и высоких требованиях к приводу.
3 ОРГАНИЗАЦИЯ ДЕЯТЕЛЬНОСТИ ПРОИЗВОДСТВЕННОГО ЭЛЕКТРОТЕХНИЧЕСКОГО ПОДРАЗДЕЛЕНИЯ
3.1 Контроль качества работ, эффективного использования технологического оборудования и материалов
Особое место в управлении качеством продукции занимает контроль качества. Именно контроль как одно из эффективных средств достижения намеченных целей и важнейшая функция управления способствует правильному использованию объективно существующих, а также созданных человеком предпосылок и условий выпуска продукции высокого качества. От степени совершенства контроля качества, его технического оснащения и организации во многом зависит эффективность производства в целом.
Именно в процессе контроля осуществляется сопоставление фактически достигнутых результатов функционирования системы с запланированными. Современные методы контроля качества продукции, позволяющие при минимальных затратах достичь высокой стабильности показателей качества, приобретают все большее значение. Процесс контроля должен пройти следующие стадии:
-
Определение концепции контроля; -
Определение цели контроля (решение о целесообразности, правильности, регулярности, эффективности процесса управления); -
Планирование проверки:
а) объекты контроля (потенциалы, методы, результаты, показатели и т.д.);
б) проверяемые нормы (этические, правовые, производственные);
в) субъекты контроля (внутренние или внешние органы контроля);
г) методы контроля;
д) объем и средства контроля (полный, сплошной, выборочный, ручной,
автоматический, компьютеризированный);
е) сроки и продолжительность проверок;
ж) последовательность, методики и допуски проверок.
-
Определение значений действительных и предписанных. -
Установление идентичности расхождений (обнаружение, количественная оценка). -
Выработка решения, определение его веса. -
Документирование решения. -
Метапроверка (проверка проверки). -
Сообщение решения (устное, письменный отчет).
10) Оценка решения (анализ отклонений, локализация причин, установление ответственности, исследование возможностей исправления, меры по устранению недостатков).
-
Виды контроля различают по следующим признакам:
а) По принадлежности субъекта контроля к предприятию:
-внутренний;
-внешний;
2) По объекту контроля:
-контроль за процессами;
- контроль за решениями;
- контроль за объектами;
- контроль за результатами.
3) По регулярности:
-системный;
-нерегулярный;
-специальный.
Контроль качества должен подтверждать выполнение заданных требований к продукции, включая в себя:
- входной контроль (материалы не должны использоваться в процессе без контроля; проверка входящего продукта должна соответствовать плану качества, закрепленным процедурам и может иметь различные формы);
- промежуточный контроль (организация должна иметь специальные документы, фиксирующие процедуру контроля и испытаний внутри процесса, и осуществлять этот контроль систематически);
- окончательный контроль (предназначен для выявления соответствия между фактическим конечным продуктом и тем, который предусмотрен планом по качеству; включает в себя результаты всех предыдущих проверок и отражает соответствие продукта необходимым требованиям);
- регистрация результатов контроля и испытаний (документы о результатах контроля и испытаний предоставляются заинтересованным организациям и лицам).
Для принятия решения о контроле и организации процессов контроля могут иметь значение ряд критериев: его эффективность, эффект влияния на людей, задачи контроля и его границы.
3.2 Показатели, характеризующие эффективность работы производственного подразделения
Ремонт – это комплекс операций по восстановлению исправности или работоспособности оборудования и восстановлению ресурсов оборудования.