ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 09.11.2023
Просмотров: 278
Скачиваний: 3
СОДЕРЖАНИЕ
3.1. Задачи топографо-геодезического и маркшейдерского обеспечения геологоразведочных работ
3.2. Основные требования к топографо-геодезическому и
навигационному обеспечению геологоразведочных работ
3.3. Организация топографо-геодезических работ
3.4. Требования к закреплению на местности
геодезических пунктов и точек наблюдений
3.7. Определение координат с помощью глобальных спутниковых навигационных систем
Тема: Геометризация россыпного месторождения золота
4.1. Оконтуривание участка россыпного месторождения
4.2. Подсчет запасов золота на участке
4.3. Построение структурных графиков
4.5. Классификация потерь и разубоживания полезного ископаемого
4.6. Показатели использования балансовых запасов
4.7. Определение и учет потерь и разубоживания песков
4.8. Мероприятия по снижению потерь и разубоживания
7.1. Расчет себестоимости маркшейдерских работ
По типу корректируемой геодезической информации оба вышеназванных способа разделяют на два вида: коррекции координат и коррекции первичных навигационных параметров.
При выполнении коррекции координат (координатный способ) непосредственно корректируются координаты мобильной станции. Поправки получают на базовой станции как разности между истинными (эталонными) и определяемыми СП координатами. Необходимым условием реализации координатного способа является использование идентичных созвездий НИСЗ для вычисления местоположения на опорном и определяемом пунктах. При полном развертывании орбитальных группировок спутниковых систем (когда одновременно в зоне видимости СП могут находиться более четырех НИСЗ), выполнение условия относительно продолжительного совпадения рабочих созвездий НИСЗ на опорном и определяемом пунктах становится затруднительным из-за довольно частой смены НИСЗ в созвездии (при заданном геометрическом факторе). Поэтому реализация координатного способа относительных определений трудновыполнима.
При выполнении коррекции первичных навигационных параметров (псевдодальностей, псевдоскоростей) на базовой станции вычисляются поправки к измеренным навигационным параметрам по всем видимым НИСЗ. Для этого одновременно с измерениями навигационных параметров находят их расчетные значения, используя данные эфемерид и истинные координаты базовой станции. Разности между измеренными и расчетными значениями используются в качестве дифференциальных поправок.
СП является основной частью аппаратуры потребителя СНС. В зависимости от получаемой точности и дополнительных возможностей приемники можно условно разделить на три типа.
К первому типу относятся навигационные кодовые приемники пониженной точности. Они, как правило, имеют порты ввода/вывода для связи с персональным компьютером, что позволяет загружать и считывать данные о путевых точках, выполнять длительные накопления данных. Современные приборы данного тина обычно позволяют производить определения координат относительным методом с постобработкой и в реальном времени. Средняя квадратическая погрешность определения координат такими приемниками в статическом режиме (на неподвижном основании) практически составляет абсолютным методом (при отсутствии режима ограниченного доступа) 15-30 м, в режиме ограниченного (селективного) доступа 50 м, а относительным методом 2-10 м.
Встроенные (внутренние) программы СП обеспечивают выполнение разнообразных функций в соответствии с режимами их работы: вычисление (в различных системах относимости и мерах измерений) координат и навигационных параметров, коррекцию координат, подготовку маршрутных данных, вождение по маршруту, двустороннюю связь с компьютером и т.д. Программы обеспечивают запись в память СП альманаха спутниковой системы, выдачу на компьютер или табло (экран) приемника информации о состоянии орбитальной группировки, расчет геометрического фактора и оптимальных рабочих зон видимости спутников. Технологическая схема навигационно-геодезического обеспечения геологоразведочных работ с использованием глобальных СНС в общем виде должна включать:
- подготовительные работы;
- полевые измерения;
- камеральную обработку полевых измерений;
- оценку точности измерений.
В состав подготовительных работ входят:
- составление прогноза видимости спутников на участке работ;
- предварительный расчет геометрического фактора;
- определение рационального времени проведения съемочных работ;
- составление схемы передвижения между определяемыми точками маршрута;
- составление полетной схемы маршрутов (перед производством аэрогеофизических съемок);
- подготовка координат точек маршрутов с занесением их в память спутникового приемника (для работы в навигационном режиме).
Составление прогноза видимости спутников позволяет определить интервалы времени непрерывной видимости заданного числа спутников на участке съемочных работ. Составление прогноза видимости спутников и расчет геометрического фактора производится на основе альманаха, принимаемого СП.
Расчет видимости спутников и параметров геометрического фактора производится в вычислительном устройстве самого приемника или на компьютере. Выполнение расчета на компьютере предпочтительнее, так как позволяет быстро выявить все необходимые сведения о состоянии СНС с распечаткой (при необходимости) этих сведений на принтере.
Для расчета видимости спутников и геометрического фактора кроме альманаха в память вычислительного устройства приемника должны быть занесены: дата и время выполнения работ, приблизительные координаты района работ.
Перед началом работ в режиме навигации (вождения) транспортного средства в память приемника должны заноситься координаты проектных точек или координаты начальных и конечных точек профилей (маршрутов), точек их изломов и пересечений с секущими профилями. После этого в режиме маршрутов приемника формируются конкретные маршруты на предстоящий рабочий день. Сохраненные в памяти приемника точки или маршруты могут вызываться из памяти по своим номерам. Перед началом движения должен вызываться необходимый маршрут или конечная точка предстоящего пути (например, точка начала предстоящего маршрута) и включаться режим навигации.
Расстояние до конечной точки и направление на нее (пеленг) определяются относительно текущей точки. При движении на конечную точку следует стремиться к минимальному боковому уклонению от линии, соединяющей начальную и конечную точки.
Величина бокового уклонения индицируется на экране приемника графически и в числовом виде с пометкой "право лево". Если движение выполняется по заранее сформированному маршруту, то прибор автоматически переключается с одного этапа на другой.
Работа со спутниковыми приемниками на летательных аппаратах требует согласованности действий бортоператора и летного состава.
При подготовке к полетам необходимо согласовывать порядок выхода на начальный проектный маршрут и захода на последующие.
Перед подходом к началу первого маршрута бортоператор должен сообщить экипажу о приближении к начальной точке маршрута. При этом пилот оценивает параметры полета и выполняет доворот (разворот) для выхода на маршрут.
Камеральная обработка спутниковых определений, выполненных абсолютным методом в статическом режиме, включает:
- осреднение накоплений на определяемых точках;
- перевычисление координат в систему относимости, принятую для данной съемки;
- оценку точности;
-формирование каталога координат, в том числе подготовку данных для программ последущей обработки.
Обработка определений, выполненных абсолютным методом в кинематическом режиме, включает:
- перевычисление координат;
- формирование каталогов для программ последующей обработки;
- вывод графической информации в виде фактических линий пути.
Обработка спутниковых определений, выполненных относительным методом с постобработкой информации проводится в следующей последовательности:
- перезапись файлов полевых накоплений в директорию с файлами базовой станции для совместной обработки;
- определение варианта фильтрации измеренных величин и других параметров обработки;
-управление программами обработки;
- подготовка каталога координат для программ последующей обработки (при необходимости в комплексе с геолого-геофизической информацией).
Для оценки точности спутниковых определений выполняют контрольные измерения на геодезических пунктах с известными координатами, а также повторные измерения на тех же пунктах.
При аэрогеофизических съемках выполняют серии залетов над геодезическими пунктами с последующей статистической обработкой измерений (не менее шести парных пролетов курсом 0° и 180°). Моменты пролета над пунктом и определение поправок за уклонение от вертикали координатной точки местности фиксируются с помощью оптического визира или аэрофотоаппарата с одновременной записью курса, истинной и барометрической высот полета. Для исключения систематической составляющей ошибки фиксации (оператором) пролеты делают в прямом и обратном направлениях.
Чтобы уменьшить ошибку, вызванную наклоном воздушного судна, контрольные пролеты выполняют в спокойную погоду на минимальной высоте (100-150 м).
3.8. Вынос в натуру геологоразведочных выработок
Для выноса геологоразведочных выработок в натуру необходимо иметь на местности геодезические пункты с известными координатами. Перед производством разбивочных работ в районе работ создается разбивочная основа для выноса в натуру устьев геологоразведочных скважин и шурфов в виде замкнутого теодолитного хода. В этой же системе должны быть получены координаты объектов выноски. Координаты пунктов геодезической разбивочной основы определяют аналитически или берут из каталогов координат пунктов съемочной основы. Координаты устьев скважин и шурфов снимают с плана графически. [3]
Вынос точек производится электронным тахеометром с помощью специальных прикладных программ. Можно вынести профильные линии двумя способами: по горизонтальным углам и расстояниям, а также по координатам. В первом случае разбивочные элементы определяют графически и затем выносят на местность полярным способом.
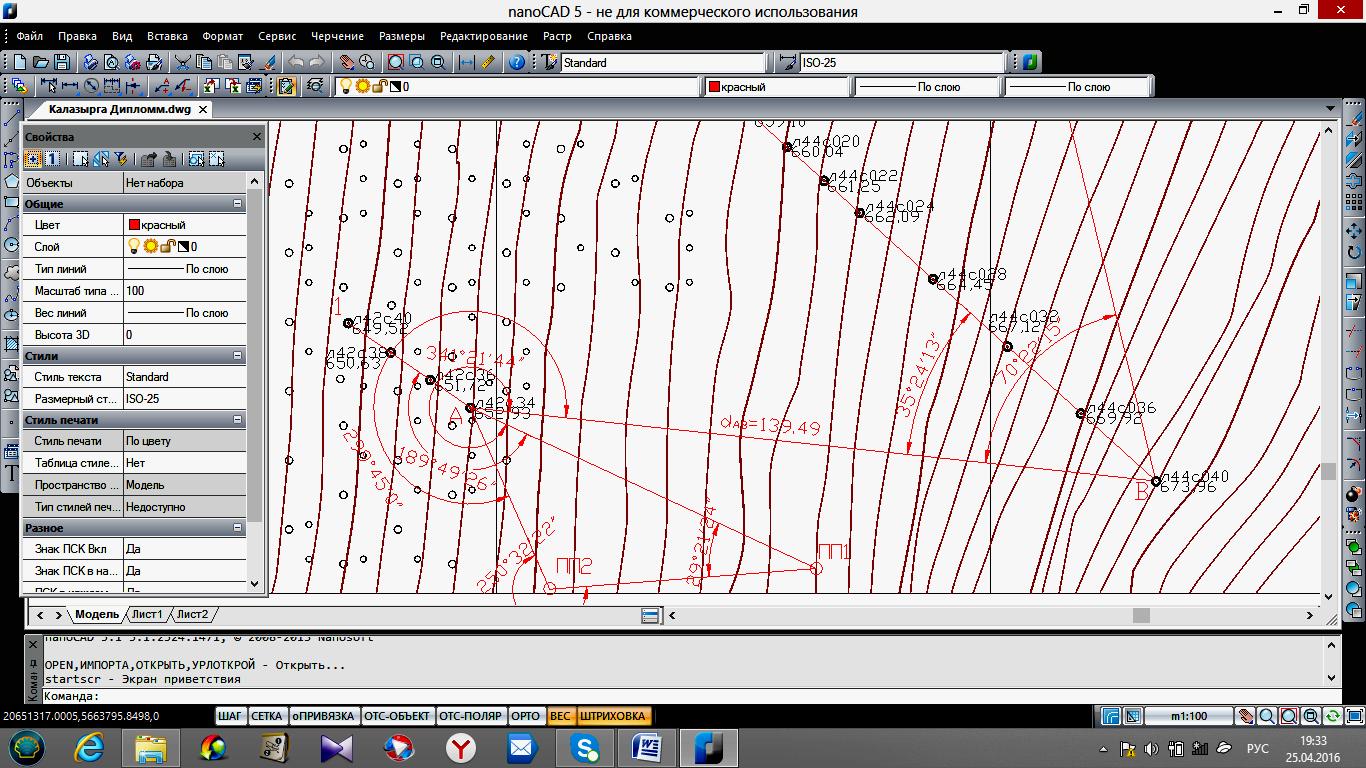
Рис.5. Фрагмент плана разбивки участка
Первую точку А разбивочной основы выносят на местность с пунктов ПП1 и ПП2 способом угловой засечки.
Точки A, B, C, D, E, F, G соединяют в тахеометрический ход и замыкают на пункты ПП3 и ПП4 (табл. 5).
Таблица 5
Таблица геометрических элементов тахеометрического хода
| Обозначение точек | Значение горизонтальных углов | Обозначение линий | Значение длин линий |
| Исх.напр.ПП1-А | βА=341о21/44// | dА-В | 139,49м |
| Исх.напр.ПП2-А | βА/=299о45/00// | dА-В | 139,49м |
| т.В | βВ=70о22/15// | dВ-С | 189,09м |
| т.С | βС=247о48/24// | dС-D | 103,16м |
| т.D | βD=160о30/22// | dD-E | 95,45м |
| т.Е | βЕ=167о47/17// | dE-F | 76,47м |
| т.F | βF=228о11/17// | dF-G | 114,40м |
| т.G на ПП3 | βG=29о15/11// | - | - |
| т.G на ПП4 | βG/=139о13/58// | - | - |
Разведочная линия А-1 разбивается от исходного направления ПП1-А посредством выноса в натуру горизонтального угла β1=189о49/26//.
Разведочная линия В-2 разбивается от исходного направления А-В посредством выноса в натуру горизонтального угла β2=35о24/13//.
Линия С-З разбивается от направления В-С – угол разбивки β3=130о17/29//.
Линия D-4 разбивается от направления С-D – угол разбивки β4=75о46/10//.
Линия E-5 разбивается от направления D-E – угол разбивки β5=88о34/19//.
Линия F-6 разбивается от направления E-F – угол разбивки β6=97о37/31//.
Линия G-7 разбивается от направления F-G – угол разбивки β7=40о45/58//.
Во втором случае вынос разведочных линий выполняется по координатам с помощью специальной программы тахеометра.