ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Книга
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 21589
Скачиваний: 19

2-7
Chapter
2.1
Signals and Spectra
Douglas Preis
2.1.1
Introduction
Signals serve several purposes in audio engineering. Primarily, they carry information, for exam-
ple, electrical analogs of music or speech or numerical data representing such information. Dis-
crete-time signals, formed from sampled values of continuous signals, are now used extensively
in digital recording, processing, storage, and reproduction of audio signals. Signals devised and
used solely to elicit a response from an audio system are called test signals. Control signals mod-
ify the internal operation of signal-processing devices. Certain signals, such as electronic ther-
mal noise, magnetic-tape hiss, or quantization noise in digital systems, may be present but
unwanted.
Essential to a deeper understanding of all kinds of signals is the spectrum. The spectrum is
defined in slightly different ways for different classes of signals, however. For example, deter-
ministic signals have a mathematical functional relationship to time that can be described by an
equation. whereas nondeterministic signals, such as noise generated by a random process, are not
predictable but are described only by their statistical properties. Their spectra are defined in dif-
ferent ways. There are also two types of deterministic signals, classified by total energy content
or average energy content; and, again, their spectra are defined differently. All spectral represen-
tations provide information about the underlying oscillatory content of the signal. This content
can be concentrated at specific frequencies or distributed over a continuum of frequencies, or
both.
2.1.2
Signal Energy and Power
A deterministic, real-valued signal f(t) is called a finite-energy or transient signal if
(2.1.1)
where t is time. The integrand f
2
(t) can be interpreted as the instantaneous power (energy/time)
if f(t) is assumed to be a time-varying voltage across a l-
Ω resistor. The numerical value of the
0
f
2
t
( )dt ∞
<
∞
–
∞
∫
<
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Source: Standard Handbook of Audio and Radio Engineering
2-8 The Audio Spectrum
integral in Equation (2.1.1) is the signal's total energy. A finite power deterministic signal satis-
fies
(2.1.2)
That is, the average energy per time or average power is finite. For example, f(t) could be a con-
stant dc voltage existing for all time across a 1-
Ω resistor.
Fundamental to understanding spectral analysis is an elementary periodic signal, that is, one
that oscillates with constant frequency and does not decay as time progresses. This simplest
oscillating signal is called a sinusoid. It predicts‘, for example, the motion of a swinging pendu-
lum (without friction) or the exchange of energy between inductor and capacitor in a lossless res-
onant circuit. The sinusoid is the solution to a differential equation that describes a wide variety
of physical oscillatory and vibrational phenomena.
2.1.2a
Sinusoids and Phasor Representation
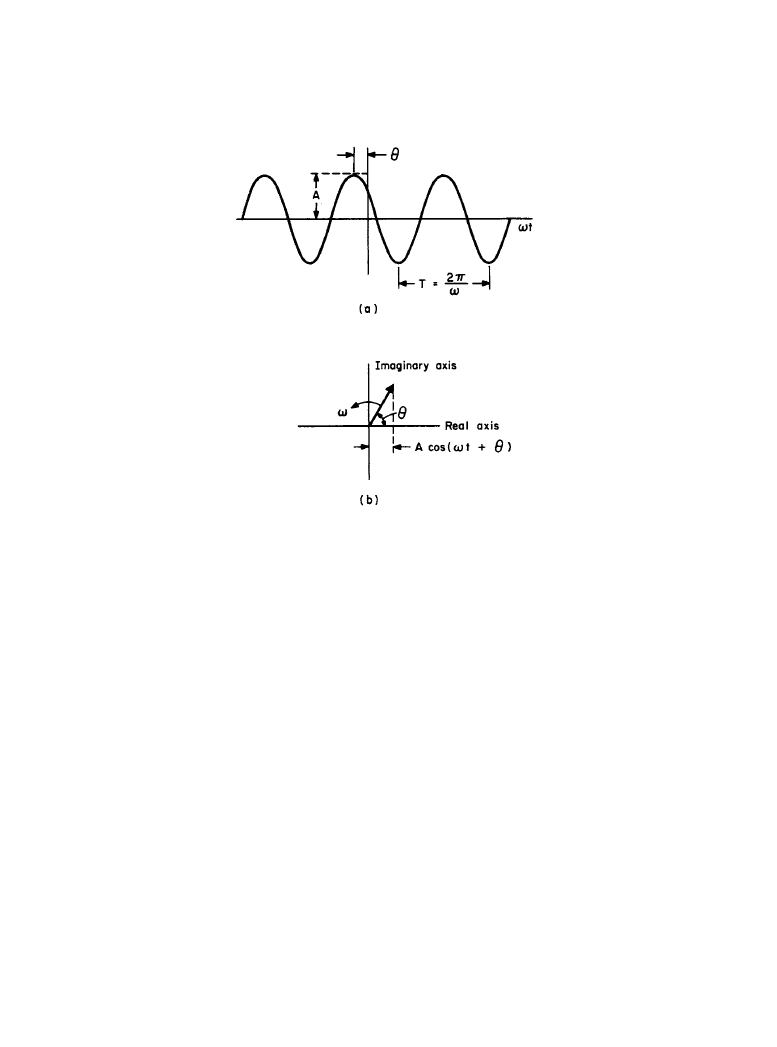
The sinusoidal signal illustrated in Figure 2.1.1a and described mathematically by
(2.1.3)
is a finite-power signal characterized by its real amplitude A, radian frequency,
ω rad/s, and θ,
which is a constant phase angle (in radians). The quantity
ω/(2π) is the cyclic frequency or num-
ber of oscillations per second, called hertz, and equals the reciprocal of the sinusoid's period T,
the time taken for one full oscillation. These relationships are illustrated in Figure 2.1.la.
The peak, or maximum, value of the signal is A. Its root-mean-square (rms) value found from
taking the square root of the expression in Equation (2.1.2), is
, and the
average value of |f(t)| over one period is 2A/
π = 0.6366A. The average power, from Equation
(2.1.2), equals A
2
/2. or simply the rms value squared. By appropriately changing the phase angle
θ, a pure cosine wave or sine wave is realized. For example, θ = 0, π/2, π, 3π/2, 2π corresponds to
, , ,
, respectively. If the phase of a sine wave is
increased by
π/2 (that is, 90° positive phase shift or phase lead), it becomes a cosine wave. A
phase shift of
π rad, or 180°, inverts the polarity of a sinusoid.
By using the Euler identity,
(2.1.4)
where ,
f(t) in Equation (2.1.3), can also be written as the real part of a time-varying
complex number (phasor), namely
(2.1.5a)
A conceptual picture of Equation (2.1.5a), called a phasor diagram, is given in Figure 2.1.1b. The
tip of the arrow describes the locus of points in the complex plane of the expression in brackets
0
1
T
---
T
∞
→
lim
f
2
t
( )dt ∞
<
T/2
–
T/2
∫
<
f t
( )
A
ωt θ
+
(
)
cos
=
A
2
(
)
⁄
0.7071A
=
A
ωt
( )
cos
A
ωt
( )
sin
–
A
ωt
( )
cos
–
A
ωt
( )
sin
e
jx
x
( )
cos
j sin x
( )
+
=
j
1
–
=
f t
( )
real Ae
j
ωt θ
+
(
)
[
]
=
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Signals and Spectra
Signals and Spectra 2-9
in Equation (2.1.5a) as the arrow itself rotates counterclockwise with angular velocity
ωrad/s. As
time progresses, the projection (or shadow) of the arrow's length A onto the horizontal (real) axis
has the values A cos (
ωt + θ). By convention, the phasor diagram is drawn when t = 0 or, equiva-
lently, showing the phase
θ of the sinusoid relative to a cosine reference phasor, cos (ωt), which
would lie on the positive real axis. Note that multiplication of this phasor by e
j
ψ
advances its
phase by
ψ rad, as can be shown by using Equation (2.1.5a). For example, multiplication of the
phasor by j = e
j
π/2
advances its phase by
π/2, or 90°.
The phasor concept can be extended on the basis of the following two identities derived from
Equation (2.1.4)
(2.1.5b)
and
(2.1.5c)
cos(
ωt)
1
2
--- e
j
ωt
e
j
ωt
–
+
[
]
=
sin
ωt
( )
1
2
--- e
j
ωt
e
j
ωt
–
[
]
=
Figure 2.1.1
Sinusoid characteristics: (
a) sinusoid
, (
b) phasor diagram representa-
tion of sinusoid.
A
ωt θ
+
(
)
cos
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Signals and Spectra

2-10 The Audio Spectrum
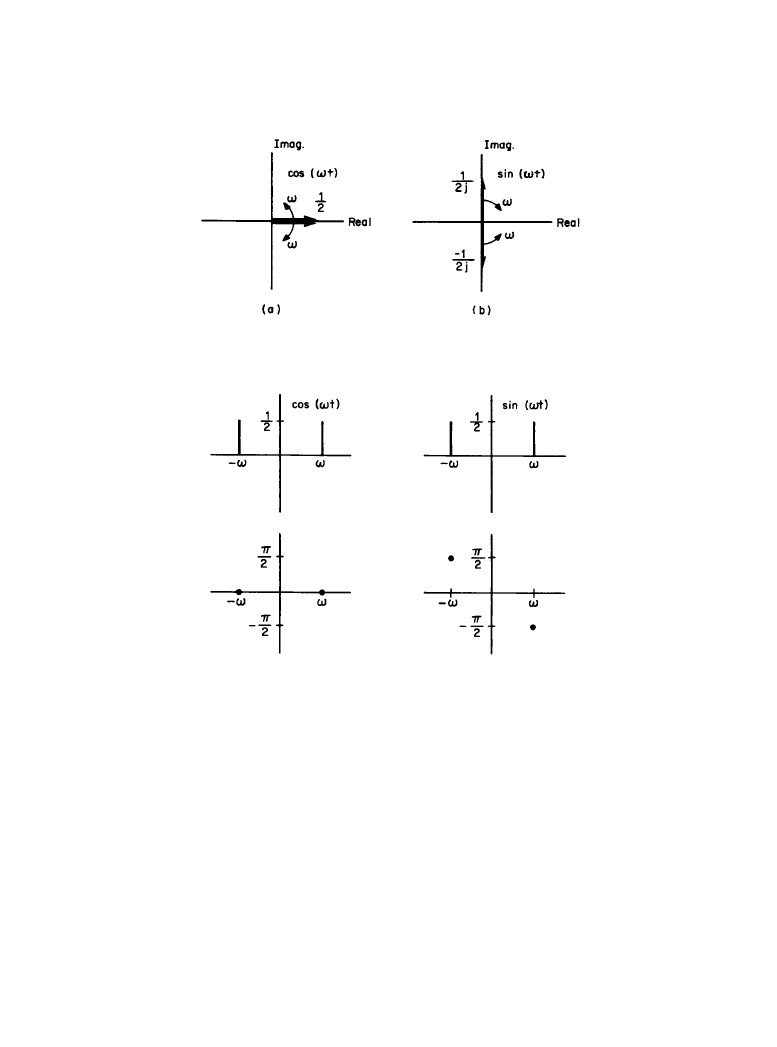
where the negative signs in the exponents are associated with
ω, implying negative angular veloc-
ity
. Thus, cos (
ωt) and sin (ωt) in Equation (2.1.4) each can be interpreted simply as a sum of
two counter-rotating phasors, as shown in Figure 2.1.2. On the left side of this figure, the imagi-
nary parts of the two phasors always cancel because they are equal and opposite, and the real
parts add to form cos (
ωt). On the right side, imaginary parts cancel at all times, and the real parts
add to yield sin (
ωt).
There are two ways to represent a sinusoid A cos (
ωt + θ) in terms of counter-rotating phasors.
The simpler method is to scale the lengths of the phasors for cos (
ωt) in Figure 2.1.2 by the
amplitude A and then to change the phase of each phasor by rotating it in its direction of rotation
θ rad. This operation corresponds to advancing or leading the phase of the +ω phasor and
advancing or leading the phase of the
phasor by
θ rad. The other way makes use of the trigo-
nometric identity
(2.1.6)
which states that a sinusoid with an arbitrary phase angle can always be represented as the sum of
a cosine wave and a sine wave whose coefficients are A cos and
, respectively. Depend-
ing on the phase angle
θ, these coefficients can be positive, negative, or zero. When either is neg-
ative, the polarity of the associated sine wave or cosine wave is just inverted; i.e., its phase is
changed by
π rad, or 180°, so that the negative sign is absorbed and the coefficients represent
nonnegative amplitudes. So, the phasors for cos (
ωt) and sin (ωt) in Figure 2.1.2 with their lengths
multiplied by the coefficients in Equation (2.1.6) also represent A cos (
ωt + θ).
2.1.2b
Line Spectrum
An alternative to counter-rotating phasors is the line spectrum (discrete spectrum). Because each
phasor shown in Figure 2.1.2 contains only three pieces of information, its length (amplitude). its
angular velocity +
ω
or
, and its phase (measured relative to the positive horizontal axis shown
in Figure 2.1.2), the same information can be presented differently as shown in Figure 2.1.3. At
points and
+
ω
on the horizontal frequency axis, a vertical line is drawn whose length equals
that of its corresponding phasor to give the amplitude. The phase of each phasor is plotted above
or below its frequency on a separate graph called the phase spectrum. The range of the phase
spectrum is from
, or
°, to +
π, or 180°. Consider, for example, sin (ωt) as represented on
the right side of Figure 2.1.2 and Figure 2.1.3. The phase of the counterclockwise phasor is
, or
°, and that of clockwise phasor is
π/2, or +90°.
The real advantage of the line-spectrum representation is evident when the signal is com-
posed of several different frequency components ±
ω
1
, ±
ω
2
, ±
ω
3
, . . , because a separate phasor
diagram would be needed for each frequency pair ±
ω
n
, whereas all frequencies can be displayed
in one line-spectrum plot. A slight and apparent disadvantage is that the concept of negative fre-
quencies is used and signal amplitude is split evenly between the positive and negative frequen-
cies. This representation is a matter of convention, however. If only the total amplitude at each
specific frequency is of interest, then phases can be ignored and line spectra drawn at dc (zero
frequency) and only at positive values of frequency. The amplitudes are simply doubled at posi-
tive frequencies from their values in the “two-sided” line-spectra representation. It is also possi-
ble, by a different convention, to define the spectrum by using only positive frequencies and
simply giving the amplitude A and phase
θ for each sinusoid in the form of Equation (2.1.3). In
ω
–
ω
–
A
ωt θ
+
(
)
cos
A
θ
cos
ωt
( )
cos
A
θ
sin
ωt
( )
sin
–
=
A
φ
sin
–
ω
–
ω
–
π
–
180
–
π 2
⁄
–
90
–
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Signals and Spectra
Signals and Spectra 2-11
some applications, it is more useful to give the power A
2
/2, rather than the amplitude A, associ-
ated with each spectral line.
The complex exponentials not only have an interesting interpretation as counter-rotating pha-
sors but also have the advantage of representing arbitrary sinusoids without explicitly using the
sine and cosine functions themselves, or having to take the real part of a complex number as in
Equation (2.1.5a). Because complex exponentials form the basis for all mathematical transfor-
mations between the time domain and frequency domain, their use has become the method of
choice.
While a sinusoid mathematically represents a pure tone at a specific frequency
ω
0
/2
π = l/T
Hz, most periodic musical sounds or periodic signal waveforms have harmonic structure, mean-
ing that they also contain frequencies that are integer multiples of the lowest or fundamental fre-
quency
ω
0
which determines the period T. These higher frequencies do, in general, have different
Figure 2.1.2
Waveform representations: (
a) cosine wave, (b) sine wave represented by counter-
rotating phasors.
Figure 2.1.3
Line-spectrum representation of
at left and
at right.
ωt
( )
cos
ωt
( )
sin
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Signals and Spectra