Файл: КП. Автоматизированный электропривод типовых производственных механизмов.pdf
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 21.12.2021
Просмотров: 672
Скачиваний: 6

6
При
выборе
уточненного
ЭД
необходимо
стремиться
к
тому
,
чтобы
значение
ω
н
совпадало
с
соответствующим
значением
для
предварительно
выбранного
ЭД
(
для
исключения
пересчета
i,
η
р
и
т
.
д
.).
5.
Разработка
системы
управления
электроприводом
и
схем
электроавтоматики
логического
управления
технологической
установкой
.
Для
выбранного
типа
и
мощности
ЭД
выбираем
комплектный
преобразователь
по
справочной
литературе
.
На
чертежах
системы
управления
электропривода
(
формат
А
4
или
А
3)
приводятся
:
-
силовая
схема
электропривода
;
-
функциональная
схема
управляющей
части
электропривода
;
-
схема
подключения
электропривода
к
силовой
сети
и
схеме
управления
.
Схема
управления
должна
содержать
:
-
схему
задатчика
скорости
с
задатчиком
интенсивности
;
-
схему
логического
управления
электроавтоматикой
,
реализующей
все
режимы
работы
.
Схема
логического
управления
может
быть
реализован
аппаратным
путем
на
базе
релейно
-
контактных
или
логических
элементов
,
или
программным
путем
на
базе
микроконтроллера
.
В
последнем
случае
приводится
схема
подключения
ПК
с
необходимым
набором
согласующих
элементов
и
алгоритм
управления
.
6.
Построение
статических
характеристик
элементов
системы
и
механических
характеристик
электропривода
.
Статические
характеристики
элементов
системы
управления
(
характеристики
вход
выход
преобразователя
и
датчиков
)
и
механические
характеристики
электропривода
строятся
аналогично
курсовым
работам
дисциплин
«
Теория
электропривода
»
и
«
Системы
управления
электроприводами
».
7.
Построение
динамических
характеристик
системы
электропривода
(
частотные
характеристики
контуров
системы
электропривода
,
переходные
характеристики
для
отклонения
в
«
малом
»
и
«
большом
»).
Коррекция
замкнутой
системы
управления
электроприводом
производится
известными
методами
«
Теории
автоматического
управления
»,
в
частности
,
наиболее
распространенными
методами
подчиненного
или
модального
управления
,
позволяющими
получить
стандартные
настройки
на
технический
или
симметричный
оптимум
с
определенными
частотными
и
переходными
характеристиками
.
Необходимо
также
произвести
расчет
точности
останова
,
исходя
из
выбранных
элементов
системы
электропривода
.
8.
В
заключении
делаются
выводы
о
соответствии
параметров
и
свойств
системы
электропривода
техническим
требованиям
,
предъявляемым
к
установке
.
7
2.
ВАРИАНТЫ
ЗАДАНИЙ
2.1.
Автоматизированный
электропривод
высокоскоростного
лифта
2.1.1.
Описание
установки
Расположение
оборудования
лифта
представлено
на
рис
.1.1.
Здесь
приняты
обозначения
: 1-
электродвигатели
лебедки
лифта
(
М
1)
и
открывания
/
закрывания
дверей
М
2; 2-
редукторы
электроприводов
; 3-
ведущий
барабан
лебедки
; 4-
кабина
; 5-
противовес
; 6-
двери
кабины
; 7-
двери
шахты
; 8-
ходовой
винт
дверей
кабины
; 9-
конечные
выключатели
хода
дверей
кабины
.
Управление
лифтом
производится
с
пульта
управления
кабины
(
приказы
)
или
с
кнопок
вызова
кабины
на
этаже
.
Схема
управления
должна
обеспечивать
собирательной
принцип
при
движении
в
обоих
направлениях
(
выполнение
попутных
вызовов
),
а
также
следующие
режимы
работы
:
а
)
нормальная
работа
–
смешанное
управление
лифтом
из
кабины
и
с
этажей
:
при
действии
приказа
выполняются
попутные
вызовы
.
б
)
ревизия
–
управление
производится
только
с
поста
ревизии
на
крыше
кабины
от
кнопок
«
Вверх
», «
Вниз
»
и
«
Стоп
»
с
исключением
действия
кнопок
приказов
и
вызовов
,
управления
из
машинного
отделения
.
в
)
аварийное
перемещение
осуществляется
по
команде
из
машинного
отделения
для
снятия
кабины
с
ловителей
или
ограничительных
концевых
выключателей
.
г
)
тестовый
прогон
используется
при
обкатке
лифта
,
проверки
его
работы
,
регистрации
сбоев
и
отказов
,
локализации
дефектных
мест
.
д
)
пожарная
опасность
–
при
поступлении
сигнала
от
пожарной
защиты
кабина
должна
отправиться
на
этаж
основной
высадки
с
выходом
на
улицу
.
Расчетный
период
работы
лифта
состоит
из
следующих
циклов
:
подъем
пустой
кабины
с
1-
го
этажа
на
верхний
–
пауза
-
спуск
загруженной
кабины
на
1-
й
этаж
-
пауза
-
подъем
загруженной
кабины
на
верхний
этаж
–
пауза
–
спуск
пустой
кабины
.
Применяемый
коэффициент
загрузки
γ
=m
г
/ m
гном
=0,75.
Тахограмма
V(t)
и
графики
ускорения
a(t)
и
рывка
p(t)
приведены
на
рис
.1.2.
8
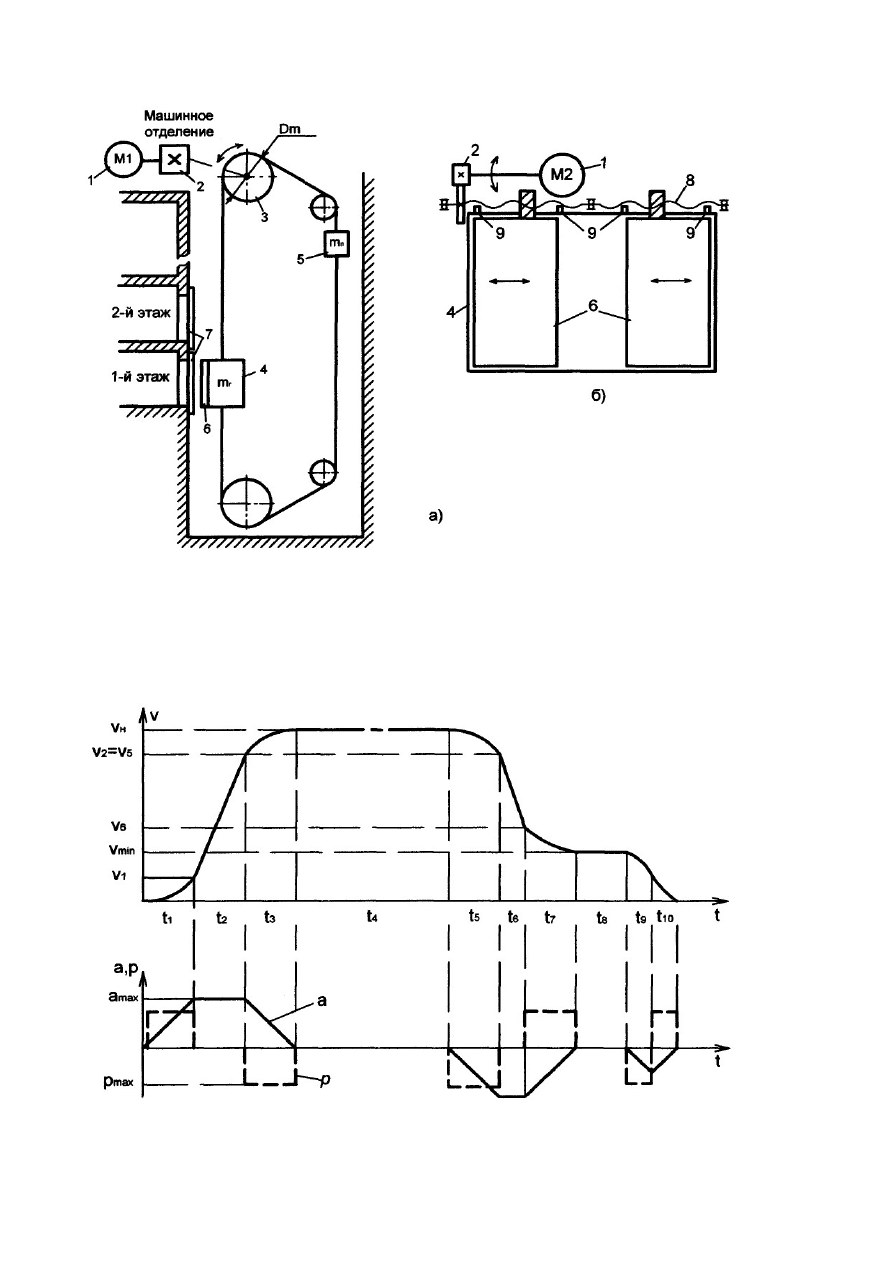
Рис
.1.1.
Расположение
оборудования
в
шахте
лифта
(
а
)
и
схема
механизма
дверей
(
б
):
1-
электродвигатели
лебедки
и
дверей
; 2-
редукторы
; 3-
в
едущий
шкив
лебедки
; 4-
кабина
; 5-
противовес
; 6-
двери
кабины
; 7-
двери
шахты
; 8-
винтовая
передача
привода
дверей
; 9-
ограничители
хода
дверей
.
Рис
.1.2.
Графики
скорости
V(t),
ускорения
a(t)
и
рывка
p(t)
за
один
цикл
(
подъем
)

9
2.1.2.
Исходные
данные
Таблица
1
Параметры
№
по
списку
№
варианта
V
min
,
м
/
с
V
н
,
м
/
с
a
max
,
м
/
с
2
p
max
,
м
/
с
3
m
гном
,
кг
m
к
,
кг
m
пр
,
кг
Н
,
м
D
ш
,
м
1
2 3 4 5 6 7 8 9 10
11
1 1
0,10
2,50
2,0
2,50
1000
2000
2500
100
550
5 2
0,15
2,75
2,0
2,5
1000
2000
2500
100
550
1
2 3 4 5 6 7 8 9 10
11
9 3
0,20
3,00
2,2
2,75
1200
2400
3000
120
600
13 4
0,25
3,25
2,2
2,75
1200
2400
3000
120
600
17 5
0,30
3,50
2,5
3,00
1300
2500
3100
140
650
21 6
0,35
3,75
2,5
3,00
1300
2500
3100
140
650
Здесь
:
Н
-
высота
подъёма
; D
ш
–
диаметр
шкива
лёбедки
.
Точность
останова
для
всех
вариантов
∆
S
≤
20
мм
.
2.1.3.
Методические
указания
После
проведения
предварительных
расчетов
по
п
.1
определяем
параметры
нагрузочной
диаграммы
.
Расчет
моментов
сопротивления
М
ci
:
-
подъем
с
грузом
Ã
k
Ø
Ï Ð
Ø
1
C1
1
g(m +m ) R
g m
R
M
;
i
i
γ
η
η
⋅
⋅
⋅
⋅
=
−
⋅
(1.1)
-
спуск
с
грузом
Ã
k
Ø
2
Ï Ð
Ø
2
C2
2
g(m +m ) R
g m
R
M
;
i
i
γ
η
η
η
⋅
⋅
⋅
⋅
⋅
=
−
⋅
(1.2)
-
подъем
без
груза
k
Ø
Ï Ð
Ø
3
C3
3
g m R
g m
R
M
;
i
i
η
η
⋅
⋅
⋅
⋅
⋅
=
−
⋅
(1.3)
-
спуск
без
груза
k
Ø
4
Ï Ð
Ø
C4
4
g m R
g m
R
M
.
i
i
η
η
⋅
⋅
⋅
⋅
⋅
=
−
⋅
(1.4)

10
Здесь
:
2
1
0.5
0.5
Ã
3
1
1
Ãí î ì
4
3
;
;
.
2 1/
m
m
2 1/
η
η
η
η γ
η
η
η
≅
⋅ =
⋅
=
= −
−
Расчет
интервалов
времени
и
перемещений
производим
по
участкам
.
1-
й
участок
:
1
max
max
2
1
max
1
3
1
max
1
t
a
/
;
V
t /2;
S
t /6.
ρ
ρ
ρ
=
=
⋅
=
⋅
(1.5)
2-
й
участок
:
2
í
1
max
2
1
max
2
2
2
1
2
max
2
ï óñê
1
2
t
(V
2V )/a
;
V
V
a
t ;
S
V t
a
t /2;
t
2t
t .
=
−
=
+
⋅
=
⋅ +
⋅
=
+
(1.6)
3-
й
участок
:
3
1
2
3
3
2
3
max
3
max
3
ï óñê
1
2
3
t
t ;
S
V t
a
t /2
t /6;
S
S
S
S .
ρ
=
=
⋅ +
⋅
−
⋅
= +
+
(1.7)
4-
й
участок
:
ï óñê
4
í
4
í
H 2 S
t
;
V
V
V .
− ⋅
≈
=
(1.8)
5-
й
участок
:
5
1
2
5
4
max
5
3
5
4
5
max
5
t =t ;
V =V -
t / 2;
S =V t -
t / 6.
ρ
ρ
⋅
⋅
⋅
(1.9)
6-
й
участок
:
2
6
7
max
7
max
7
6
5
6
max
2
6
5
6
max
6
V
V
a
t -
/2;
t
(V - V )/a
;
S
V t - a
t /2.
t
ρ
=
+
⋅
⋅
=
=
⋅
⋅
⋅
(1.10)
7-
й
участок
:
7
5
1
7
8
min
2
3
7
6
7
max
7
max
7
t
t
t ;
V
V
V ;
S
V t
a
t /2 -
t /6.
ρ
= =
=
=
=
⋅ + ⋅
⋅
⋅
(1.11)