Файл: КП. Автоматизированный электропривод типовых производственных механизмов.pdf
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 21.12.2021
Просмотров: 673
Скачиваний: 6

16
5-
й
участок
:
5
1
2
5
4
max
5
3
5
4
5
max
5
t
t ;
V
V -
t /2;
S
V t -
t /6.
ρ
ρ
=
=
⋅
=
⋅
⋅
(2.9)
6-
й
участок
:
2
6
7
max
7
max
7
6
5
6
max
2
6
5
6
max
6
V
V
a
t -
t /2;
t
(V - V )/a
;
S
V t - a
t /2.
ρ
=
+
⋅
⋅
=
=
⋅
⋅
(2.10)
7-
й
участок
:
7
5
1
7
8
min
2
3
7
6
7
max
7
max
7
t
t
t ;
V
V
V ;
S
V t
a
t /2 -
t /6.
ρ
= =
=
=
=
⋅ +
⋅
⋅
(2.11)
Торможение
:
òî ðì
5
6
7
òî ðì
5
6
7
t
t
t
t ;
S
S
S
S .
= + +
=
+
+
(2.12)
Время
дотягивания
на
V
min
принимаем
t
8
=0,5 c; V
8
=V
min
.
9-
й
участок
:
8
9
max
2
9
8
max
9
3
9
8
9
max
9
V
t
;
V
V -
t /2;
S
V t -
t /6.
ρ
ρ
ρ
=
=
⋅
=
⋅
⋅
⋅
(2.13)
10-
й
участок
:
10
9
2
10
9
max
10
2
10
9
9
10
max
10
2
3
10
9
10
9
10
max
10
t
t ;
a
t /2 0;
V
V
a t -
t /2 0;
S
/ 2
/ 6.
a
V t
a t
t
ρ
ρ
ρ
=
=
−
⋅
=
=
+ ⋅
⋅
=
= ⋅ + ⋅
−
⋅
(2.14)
Путь
и
время
точного
останова
:
+
+
=
+
+
=
10
9
8
ост
_
точ
10
9
8
ост
_
точ
t
t
t
t
S
S
S
S
(2.15)

17
Время
пауз
принимаем
:
n
n1
n2
n3
=
+
t t
2(t +t ),
(2.16)
где
n1
t
1c
≅
–
захват
(
отпускание
)
груза
из
ячейки
(
в
ячейку
);
n2
t =5c –
перемещение
тележки
из
зоны
загрузки
.
n3
t -
перемещение
тележки
из
зоны
выгрузки
.
Время
цикла
:
ö
äâ
n
T =4(t +t )
(2.17)
Моменты
инерции
пустого
грузозахвата
и
с
грузом
:
4
2
â
äâ
1
2
=
.
m t
J J
4
i
π
⋅
+
⋅ ⋅
(2.18)
2
4
ãí
â
2
äâ
2
2
(m +
m )t
J =J +
.
4
i
γ
π
⋅
⋅
⋅
(2.19)
Далее
,
в
соответствии
с
указанным
по
п
.1,
строим
нагрузочную
диаграмму
,
производим
уточненный
выбор
ЭД
,
разрабатываем
систему
управления
,
рассчитываем
её
параметры
,
строим
статические
и
динамические
характеристики
.
2.3
Автоматизированный
электропривод
экскаватора
-
лопаты
2.3.1
Описание
установки
Общий
вид
карьерного
экскаватора
-
лопаты
представлен
на
рис
. 3.1
Управление
всеми
механизмами
(
установка
стрелы
на
нужный
угол
подъема
,
подъем
ковша
,
напор
рукояти
,
поворот
корпуса
,
открытие
ковша
,
ход
экскаватора
),
осуществляется
из
кабины
машиниста
.
В
настоящем
задании
предусматривается
расчет
электропривода
подъема
ковша
.
Схема
управления
каждым
механизмом
предполагает
ручное
регулирование
скорости
электроприводов
при
помощи
командоконтроллеров
или
джойстиков
(
в
случае
микропроцессорной
системы
управления
)
и
должна
обеспечивать
следующие
режимы
:
а
)
нормальная
работа
с
управлением
из
кабины
машиниста
;
б
)
наладка
(
ревизия
) –
управление
из
кабины
или
при
помощи
вспомогательного
пульта
в
машинном
отделении
;
в
)
аварийное
торможение
при
нагрузках
и
исчезновении
питания
;
г
)
ограничение
ходов
механизмов
;
д
)
блокировки
аварийных
режимов
и
их
индикацию
.
Расчетный
период
работы
механизма
состоит
из
следующих
циклов
:
подъем
ковша
из
начального
положения
(
т
.1
на
расчетной
схеме
по
рис
3.20;
угол
копания
α
1
=0),
начало
копания
(
т
.2;
α
2
=15°),
конец
забора
грунта
(
т
.3;
α
3
=60°),
окончание
подъема
ковша
(
т
.4;
α
4
=75°),
поворот
корпуса
,
открытие
люка
ковша
и
высыпание
грунта
,
поворот
корпуса
в
исходное
положение
,
18
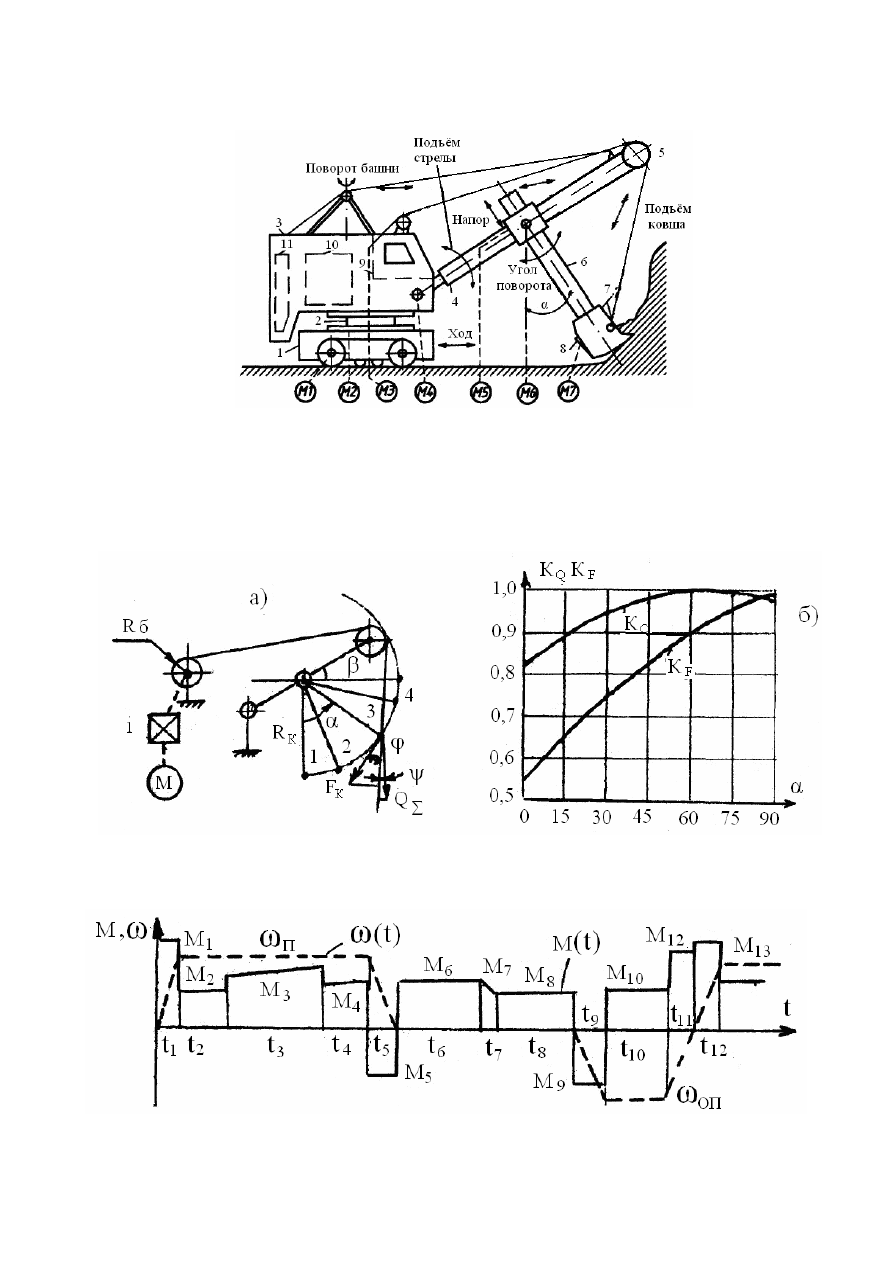
Рис
.3.1.
Общий
вид
экскаватора
-
лопаты
: 1 -
ходовая
часть
; 2 -
поворотная
платформа
;
3 -
корпус
; 4 -
стрела
; 5 -
шкив
подъема
ковша
; 6 -
рукоять
; 7 -
ковш
; 8 -
люк
открытия
ковша
; 9 -
кабина
оператора
; 10 -
машинное
отделение
; 11 -
противовес
;
электродвигатели
Ml
-
хода
,
М
2 -
поворота
,
МЗ
-
подъема
ковша
,
М
4 -
подъема
стрелы
,
М
5 -
напора
рукояти
,
Мб
-
поворота
,
М
7 -
открытия
люка
ковша
Рис
.3.2.
Расчетная
схема
определения
усилий
копания
и
подъема
ковша
(
а
)
и
номограмма
определения
коэффициентов
приведения
(
б
)
Рис
. 3.3.
Тахограмма
и
нагрузочная
диаграмма
электропривода
подъема
ковша
за
цикл

19
опускание
ковша
в
начальную
точку
.
Несмотря
на
то
,
что
копание
осуществляется
при
небольшой
скорости
подачи
рукояти
(
напора
)
для
нормального
забора
грунта
,
длины
вылета
рукояти
и
стрелы
следует
считать
постоянными
и
равными
радиусу
копания
: l
P
=l
C
=R
K
,
т
.
е
.
траектория
движения
ковша
совпадает
с
дугой
окружности
радиуса
R
K
.
Коэффициент
заполнения
ковша
k
З
=0,9.
Тахограмма
угловой
скорости
ЭД
подъема
ω
(t)
и
график
нагрузки
приведены
на
рис
. 3.3.
2.3.2
Исходные
данные
Таблица
3
№
по
списку
№
варианта
V,
м
3
R
K
,
м
V
K
,
м
/
с
V
ОП
,
м
/
с
m
K
,
Т
m
P
,
Т
а
MAX
,
м
/
с
2
R
Ш
,
м
1 2 3 4 5 6 7 8 9 10
3 1
3,0
10,0
0,8
1,4
6,0
3,5
1,2
0,20
7 2
3,5
10,0
0,8
1,4
6,5
3,8
1,0
0,20
11 3 4,0
12,0
0,8
1,2
7,2
4,2
1,0
0,25
15 4 6,0
13,5
0,7
1,2
7,6
4,4
0,8
0,25
19 5 8,0
13,5
0,6
1,0
8,0
4,6
0,8
0,30
23 6
10,0
15,0
0,6
1,0 8,5 4,8 0,7 0,30
Здесь
: V-
объем
ковша
; R
K
-
радиус
копания
; V
K
, V
ОП
–
скорости
подъема
и
опускания
ковша
; m
K
, m
P
–
масса
ковша
и
рукояти
;
а
MAX
–
ускорение
; R
Ш
–
радиус
шкива
лебедки
ковша
.
Общие
данные
:
углы
подъема
-
α
1
=0;
α
2
=15°;
α
3
=60°;
α
3
=75°;
угол
подъема
стрелы
β
=30°;
удельный
вес
грунта
γ
=2
Т
/
м
3
;
удельный
коэффициент
копания
К
УД
=15
кН
/
м
3
.
2.3.3
Методические
указания
Для
определения
тягового
усилия
на
тросе
механизма
подъема
ковша
необходимо
спроецировать
усилия
сопротивления
на
линию
,
параллельную
линии
натяжения
троса
(
рис
. 3.2
а
).
Приведенное
усилие
от
веса
рукояти
,
ковша
и
груза
: Q'
Σ
= Q
Σ
·cos
ψ
=Q·K
Q
=K
Q
·g( m
P
+m
K
+m
гр
);
где
g=9,81
м
/
с
2
–
ускорение
свободного
падения
; m
гр
-
масса
груза
;
увеличивающаяся
при
копании
от
m
гр
=0
до
m
гр
= k
З
·
γ
·V.
Приведенное
усилие
капания
: F'
K
=F
K
cos
φ
=F
K
·k
F
= k
F
·
К
УД
·V.
Полное
приведенное
усилие
сопротивления
:
F
C
= Q'
Σ
+F'
K
.
Номограмма
для
определения
коэффициентов
k
Q
,k
F
приведена
на
рис
.3.2
б
.
Максимальное
значение
F
CMAX
достигается
в
момент
окончания
заполнения
ковша
(
т
.3
по
рис
. 3.2
а
,
α
3
=60°).
Оценочная
мощность
механизма
подъема
ковша
: P= F
CMAX
· V
K
.
По
этой
мощности
выбирается
предварительно
ЭД
,
его
номинальная
угловая
скорость
ω
H
и
момент
инерции
Ј
ДВ
.

20
После
определения
передаточного
числа
i,
КПД
редуктора
η
1
=
η
РН
определяем
параметры
нагрузочной
диаграммы
.
Расчет
моментов
сопротивления
:
-
подъем
с
грузом
и
копание
(
α
=0-75°)
C
Ø
C1
1
F ( ) R
M =
i
α
η
⋅
⋅
;
(3.1)
-
удерживание
ковша
с
грузом
при
повороте
корпуса
(
α
=75°,
m
гр
= k
З
·
γ
·V)
CMAX
Ø
C2
1
F
R
M
i
η
⋅
=
⋅
;
(3.2)
-
удерживание
пустого
ковша
при
повороте
корпуса
(
α
=75°, m
гр
=0)
CMIN
Ø
C3
3
F
R
M =
i
η
⋅
⋅
;
(3.3)
-
опускание
пустого
ковша
в
исходное
положение
(
α
=75°-0, m
гр
=0)
C
Ø
4
C4
F ( ) R
M =
i
α
η
⋅
;
(3.4)
здесь
'
'
H
1
Ï
ñò
âò
J
t
,
M -M -0,5M
ω
=
0.5
CMIN
3
1
CMAX
F
;
F
η
η
=
4
3
1
2
.
η
η
= −
Расчет
интервалов
времени
и
перемещений
проводим
по
участкам
(
см
.
рис
. 3.3)
1-
й
участок
(
пуск
ЭД
):
1
K
MAX
K
1
1
t =V /a
;
V t
S =
.
2
⋅
(3.5)
2-
й
участок
(
α
=0-15°):
2
K
2
2
2
K
S =2
R
/360;
t =S /V .
π
α
⋅ ⋅
(3.6)
3-
й
участок
(
α
=15°-60°):
3
K
3
2
3
3
K
S =2
R ( - )/360;
t =S /V .
π
α α
⋅ ⋅
(3.7)
4-
й
участок
(
α
=60°-75°):
3
K
4
3
4
4
K
S =2
R ( - )/360;
t =S /V .
π
α α
⋅ ⋅
(3.8)
5-
й
участок
(
торможение
ЭД
):
5
1
5
1
t =t ;S =S .
(3.9)