Файл: КП. Автоматизированный электропривод типовых производственных механизмов.pdf
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 21.12.2021
Просмотров: 675
Скачиваний: 6

11
Торможение
:
òî ðì
5
6
7
òî ðì
5
6
7
t
t
t
t ;
S
S
S
S .
= + +
=
+
+
(1.12)
Время
дотягивания
на
V
min
принимаем
t
8
=1 c.
9-
й
участок
:
8
9
max
2
9
8
max
9
3
9
8
9
max
9
V
t
;
V
V -
t /2;
S
V t -
t /6.
ρ
ρ
ρ
=
=
⋅
=
⋅
⋅
⋅
(1.13)
10-
й
участок
:
10
9
2
10
9
max
10
2
10
9
9
10
max
10
2
3
10
9
10
9
10
max
10
t
t ;
a
t /2 0;
V
V
a t -
t /2 0;
S
/ 2
/ 6.
a
V t
a t
t
ρ
ρ
ρ
=
=
−
⋅
=
=
+ ⋅
⋅
=
= ⋅ + ⋅
−
⋅
(1.14)
Путь
и
время
точного
останова
:
òî ÷í .î ñò.
8
9
10
òî ÷í .î ñò.
8
9
10
S
=S +S +S
t
=t +t +t .
(1.15)
Время
пауз
принимаем
:
1
2
3
2 (
),
ï
ï
ï
ï
t
t
t
t
=
+ ⋅
+
(1.16)
где
t
п
1
≈
2
с
–
опрос
,
нажатие
кнопке
; t
п
2
≈
1,5 c –
открывание
/
закрывание
дверей
; t
п
3
≈
10 c –
вход
выход
пассажиров
.
Время
цикла
:
T
ц
=4(t
дв
+t
п
).
(1.17)
Продолжительность
включения
:
ö
äâ
4 t
Ï Â=
100%;
T
⋅
⋅
(1.18)
Моменты
инерции
пустой
кабины
и
с
грузом
:
2
ê
ï ð
ø
1
äâ
2
(m
m ) R
J =J
;
i
+
⋅
+
(1.19)
2
ê
ï ð
ã
ø
2
äâ
2
(m +m +m ) R
J =J
.
i
⋅
+
(1.20)
Далее
,
в
соответствии
с
указаниями
по
п
.1,
строим
нагрузочную
диаграмму
,
производим
уточненный
выбор
ЭД
,
разрабатываем
систему
управления
,
рассчитываем
её
параметры
,
строим
статические
и
динамические
характеристики
.

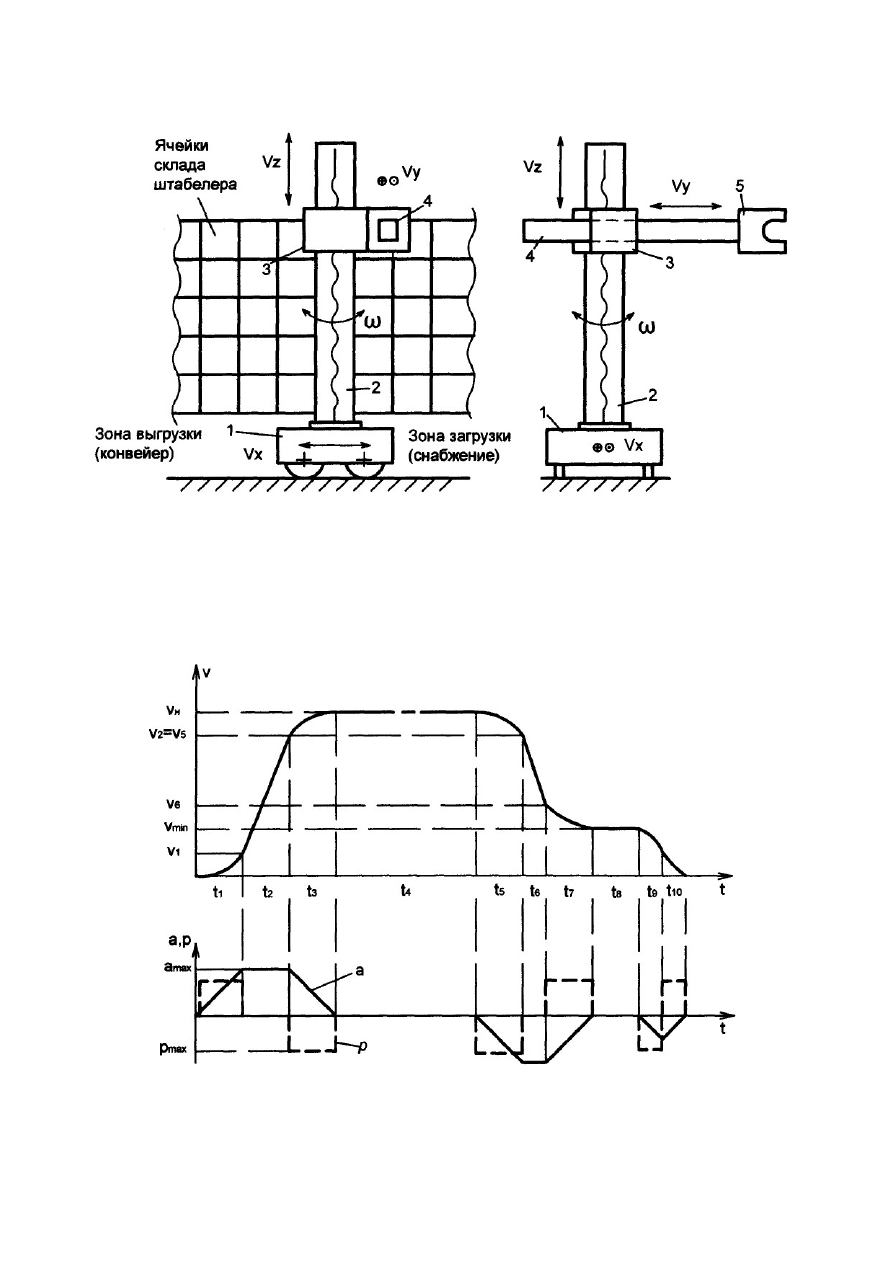
12
2.2.
Автоматизированный
электропривод
робота
-
манипулятора
2.2.1.
Описание
установки
Расположение
механизмов
робота
-
манипулятора
приведено
на
рис
.2.1.
Из
зоны
загрузки
комплектующие
изделия
и
детали
передаются
роботом
-
манипулятором
в
соответствующие
ячейки
склада
-
штабеллера
,
и
по
мере
надобности
требуемых
изделий
,
на
конвейере
передаются
из
ячеек
склада
в
зону
выгрузки
.
Цикл
работы
робота
состоит
из
следующих
интервалов
(
начиная
с
зоны
загрузки
):
-
захват
изделия
;
-
перемещение
тележки
до
заданного
столбца
ячеек
склада
;
-
поворот
несущего
механизма
4;
-
подъем
несущего
механизма
4
при
помощи
вертикального
механизма
3;
-
выдвижение
механизма
4
с
грузом
в
ячейку
;
-
отпускание
изделия
;
-
выдвижение
механизма
4
от
ячейки
;
-
перемещение
тележки
и
подъемного
механизма
к
нулевой
ячейке
с
требуемым
на
конвейере
изделием
;
-
перемещение
грузозахвата
в
ячейку
;
-
захват
груза
;
-
выдвижение
механизма
4
от
ячейки
;
-
перемещение
поворотного
,
подъемного
механизмов
и
тележки
в
зону
выгрузки
;
-
отпускание
изделия
;
-
перемещение
тележки
и
поворотного
механизма
в
зону
загрузки
.
В
данной
работе
рассчитывается
электропривод
механизма
подъема
робота
-
манипулятора
.
Время
,
затрачиваемое
на
остальные
движения
и
операции
,
считается
при
этом
временем
паузы
.
Период
работы
подъемного
механизма
состоит
из
следующих
циклов
:
подъем
пустого
грузозахвата
–
пауза
–
опускание
грузозахвата
с
грузом
–
пауза
–
подъем
грузозахвата
с
грузом
–
пауза
–
опускание
пустого
грузозахвата
.
Команды
на
управление
роботом
–
манипулятором
приходят
от
центральной
ЭВМ
диспетчирования
производства
;
сюда
же
собираются
ответные
сигналы
от
робота
об
исполнении
команд
.
Бесконтактная
схема
приема
передачи
команд
управления
на
робот
может
быть
реализована
на
базе
полупроводниковых
приборов
инфракрасного
излучения
или
радиолокационным
способом
(
в
настоящей
работе
не
рассматривается
).
Схема
управления
роботом
,
расположенная
на
тележке
,
должна
обеспечивать
следующие
режимы
работы
:
а
)
нормальный
автоматический
режим
с
управлением
от
центральной
ЭВМ
;
13
б
)
наладочный
режим
с
управлением
от
кнопок
«
Вперед
», «
Назад
»,
«
Стоп
»,
и
переключателя
выбора
механизма
робота
,
пульта
управления
,
расположенного
на
тележке
робота
.
Применяемый
средний
коэффициент
загрузки
механизма
подъема
γ
=m
н
/m
ном
=0,75.
Тахограмма
V(t) ,
графики
ускорения
a(t)
и
рывка
ρ
(t)
приведены
на
рис
.2.2.
2.2.2.
Исходные
данные
Таблица
2
Параметры
№
по
списку
№
варианта
V
min
,
м
/
с
V
н
,
м
/
с
a
max
,
м
/
с
2
p
max
,
м
/
с
3
m
4
,
кг
m
гн
,
кг
Н
,
м
t
в
,
мм
2 1
0,05
0,20
0,50
4,0
50
100
2,0
5,0
6 2
0,05
0,25
0,55
4,0
50
120
2,0
5,0
10 3 0,05
0,30
0,60
4,5
75
150
2,2
5,0
14 4 0,06
0,35
0,65
4,5
75
170
2,2
10,0
18 5 0,06
0,4
0,70
5,0
100
200
2,5
10,0
22 6 0,06
0,45
0,75
5,0
100
250
2,5
10,0
Здесь
:
Н
–
высота
подъёма
; t
в
–
шаг
винта
механизма
подъёма
; m
4
–
масса
механизма
подъёма
с
грузозахватом
; m
гн
–
номинальная
масса
груза
.
Точность
останова
для
всех
вариантов
∆
S
≤
0.5
мм
.
14
Рис
.2.1.
Расположение
механизмов
робота
-
манипулятора
склада
штабелера
:
1 -
тележка
; 2 -
поворотная
колона
; 3 -
вертикальный
несущий
механизм
; 4 -
несущий
механизм
грузозахвата
; 5 –
грузозахват
Рис
. 1.2.
Графики
скорости
V(t),
ускорения
a(t)
и
рывка
p(t)
за
один
цикл

15
2.2.3.
Методические
указания
После
проведения
предварительных
расчетов
по
п
.1
определяем
параметры
нагрузочной
диаграммы
.
Расчет
моментов
сопротивления
М
с
i
:
-
подъём
с
грузом
C1
ãí
4
1
M
( m
m ) t / 2 i
;
â
g
γ
π η
=
⋅
+
⋅
⋅ ⋅
(2.1)
-
спуск
с
грузом
C2
ãí
4
â
2
M
( m
m ) t
/2 i;
g
γ
η π
=
⋅
+
⋅ ⋅
⋅
(2.2)
-
подъём
без
груза
C3
ãí
4
â
3
M
( m +m ) t /2 i
;
g
γ
π η
=
⋅
⋅
⋅ ⋅
(2.3)
-
спуск
без
груза
C4
ãí
4
â
í
M
( m +m ) t
/ 2 i;
g
γ
η
π
=
⋅
⋅ ⋅
⋅
(2.4)
Здесь
:
1
2
1
3
1
4
3
;
2 1/ ;
;
2 1/ ;
0,95
ð
â
â
η η η
η
η
η
γ η
η
η
η
=
⋅
= −
=
⋅
= −
≈
-
КПД
винта
.
Расчет
интервалов
времени
и
перемещений
производим
по
участкам
.
1-
й
участок
:
1
max
max
2
1
max
1
3
1
max
1
t =a
/p
;
V =p
t /2 ;
S =p
t /6.
⋅
⋅
(2.5)
2-
й
участок
:
2
í
1
max
2
1
max
2
2
2
1
2
max
1
ï óñê
1
2
t =(V -2 V )/a
;
V =V +a
t
;
S =V t +a
t /2;
t
=2t +t .
⋅
⋅
⋅
⋅
(2.6)
3-
й
участок
:
3
1
2
3
3
2
3
max
3
max
3
ï óñê
1
2
3
t
t ;
S
V t
a
t /2
t /6;
S
S
S
S .
ρ
=
=
⋅ +
⋅
−
⋅
= +
+
(2.7)
4-
й
участок
:
ï óñê
4
í
4
í
H 2 S
t
;
V
V
V .
− ⋅
≈
=
(2.8)