Файл: Создание электронного учебного курса Разработка, моделирование и программирование мехатронных устройств.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 22.11.2023
Просмотров: 40
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Содержание
-
Анализ электронных платформ для создания и запуска онлайн курса -
Структура электронного учебного курса «Разработка, моделирование и программирование мехатронных устройств» -
Содержание электронного учебного курса «Разработка, моделирование и программирование мехатронных устройств» -
Построение 3d-модели конструктивной компоновки манипулятора -
Методика исследования динамических процессов 3d-модели механизма в среде Matlab -
Выбор электродвигателей и передаточных механизмов -
Выбор микроконтроллера
Научно-исследовательская работа на тему: «Создание электронного учебного курса «Разработка, моделирование и программирование мехатронных устройств»
-
АНАЛИЗ ЭЛЕКТРОННЫХ ПЛАТФОРМ ДЛЯ СОЗДАНИЯ И ЗАПУСКА ОНЛАЙН КУРСА
Электронный курс (ЭУК) – это образовательное электронное издание, или информационная система комплексного назначения для реализации дидактических возможностей средств информационно-коммуникационных технологий и поддержки учебного процесса в учреждениях общего, специального, профессионального образования, а также для самообразования в рамках учебных программ, в том числе нацеленных на непрерывное образование. ЭУК является частью электронного образования.
С целью разработки ЭУК был произведен анализ существующих платформ, таких как Moodle, Eduardo, Stepik, а также ряд профессиональных платформ CoursLab, iSpring и облачной технологии Sway.
Платформа для создания и запуска онлайн курсов Eduardo позволяет создавать онлайн курс бесплатно (с определенными ограничениями): каждый пользователь может создать не более 5 курсов, на каждый курс можно пригласитьне более 200 слушателей.
На образовательной платформе Stepik курс может создать любой пользователь платформы самостоятельно. Имеется возможность создания онлайн курса бесплатно (с определенными ограничениями).
Профессиональный редактор CoursLab дает возможность создания электронного курса с использованием персонажей, встроенной системой тестирования. Можно размесить курс на сайте, записать на диск.
iSpring является бесплатным приложением (надстройка в PowerPoint). Дает возможность создания очень простого курса в Flash или HTML5 из презентации. Курс можно разместить на сайте или записать на диск.
Недостатком вышеперечисленных платформ является необходимое освоение инструментария редактора.
Для создания электронного учебного курса «Разработка, моделирование и программирование мехатронных устройств» была выбрана платформа Moodle (система управления курсами (электронное обучение), также известная как система управления обучением или виртуальная обучающая среда. Является аббревиатурой от англ. Modular Object-Oriented Dynamic Learning Environment (модульная объектно-ориентированная динамическая обучающая среда). Представляет собой свободное (распространяющееся по лицензии GNU GPL) веб-приложение, предоставляющее возможность создавать сайты для онлайн-обучения). Основной причиной выбора данной платформы является то, что наш университет использует Moodle.
Функционал Moodle:
-
Поддерживаемые форматы. Moodle поддерживает все современные форматы. SCORM, AICC и IMS поддерживаются по умолчанию, для xAPI нужен плагин (например, Logstore API). -
Интеграция. Moodle легко интегрируется с другими системами и сервисами. Если нужно подключить CRM систему, можно воспользоваться Arlo или Edwiser Bridge (подключает все необходимое для eCommerce). WordPress также интегрируется через Edwiser Bridge. Вебинарные сервисы можно подключить через BigBlueButton или OpenMeetings. -
Контент обучения. В Moodle можно загрузить любой тип контента: текстовый (включая PDF и XLS), изображения, презентации (через плагин Presentation), тесты и курсы. Видео можно загрузить просто так или для удобства подключить Medial — стриминговый видеосервис. Можно формировать планы обучения (learning plans). -
Мобильное обучение. На смартфонах и планшетах Moodle можно открывать в мобильных браузерах Chrome и Safari или использовать приложение Moodle Mobile. -
Отчетность. В Moodle можно выгружать любой вид отчета, но для этого нужен плагин. В данном случае плагин отвечает за дизайн отчета (график или таблица) и выгружаемую информацию (пользователи, учебные материалы, просмотры и т.п.).
-
СТРУКТУРА ЭЛЕКТРОННОГО УЧЕБНОГО КУРСА «РАЗРАБОТКА, МОДЕЛИРОВАНИЕ И ПРОГРАММИРОВАНИЕ МЕХАТРОННЫХ УСТРОЙСТВ»
| № | Вид занятия | Примечание |
| 1 | Лекция | Видеолекция, сопровождаемая мультимедийными материалами. Продолжительность не более 2 академических часов. |
| 2 | Самостоятельная работа | Задача самостоятельной работы - изучение дополнительной литературы к модулю, представленной преподавателем. |
| 3 | Домашнее задание | Письменное домашнее задание (выполнение задач и т.д.). Домашнее задание в письменном виде рекомендуется в каждом модуле. Критерии оценки домашнего задания должны быть представлены в информационном разделе. Домашним заданием может быть выполнение теста. |
| 4 | Тестирование по результатам изучения модуля | Тестирование базируется на вопросах, обозначенных в лекции и в дополнительной литературе. |
| 5 | Интерактивное общение | Общение в интерактивном режиме с преподавателем (или ассистентом курса) по вопросам курса. Общение в группе. Преподаватель формирует темы для обсуждения в группе. Общение может осуществляться в режиме видеоконференции. |
-
СОДЕРЖАНИЕ ЭЛЕКТРОННОГО УЧЕБНОГО КУРСА «РАЗРАБОТКА, МОДЕЛИРОВАНИЕ И ПРОГРАММИРОВАНИЕ МЕХАТРОННЫХ УСТРОЙСТВ»
-
Составление кинематической модели манипулятора.
Типичными представителями многокоординатных (многозвенных) механизмов являются манипуляторы – механизмы, обладающие несколькими степенями подвижности (свободы), которые предназначены для перемещения и ориентации объектов в рабочем пространстве. Манипулятор является базовым элементом мехатронного устройства.
Для манипуляторов даются варианты исходных схем (рис. 1).
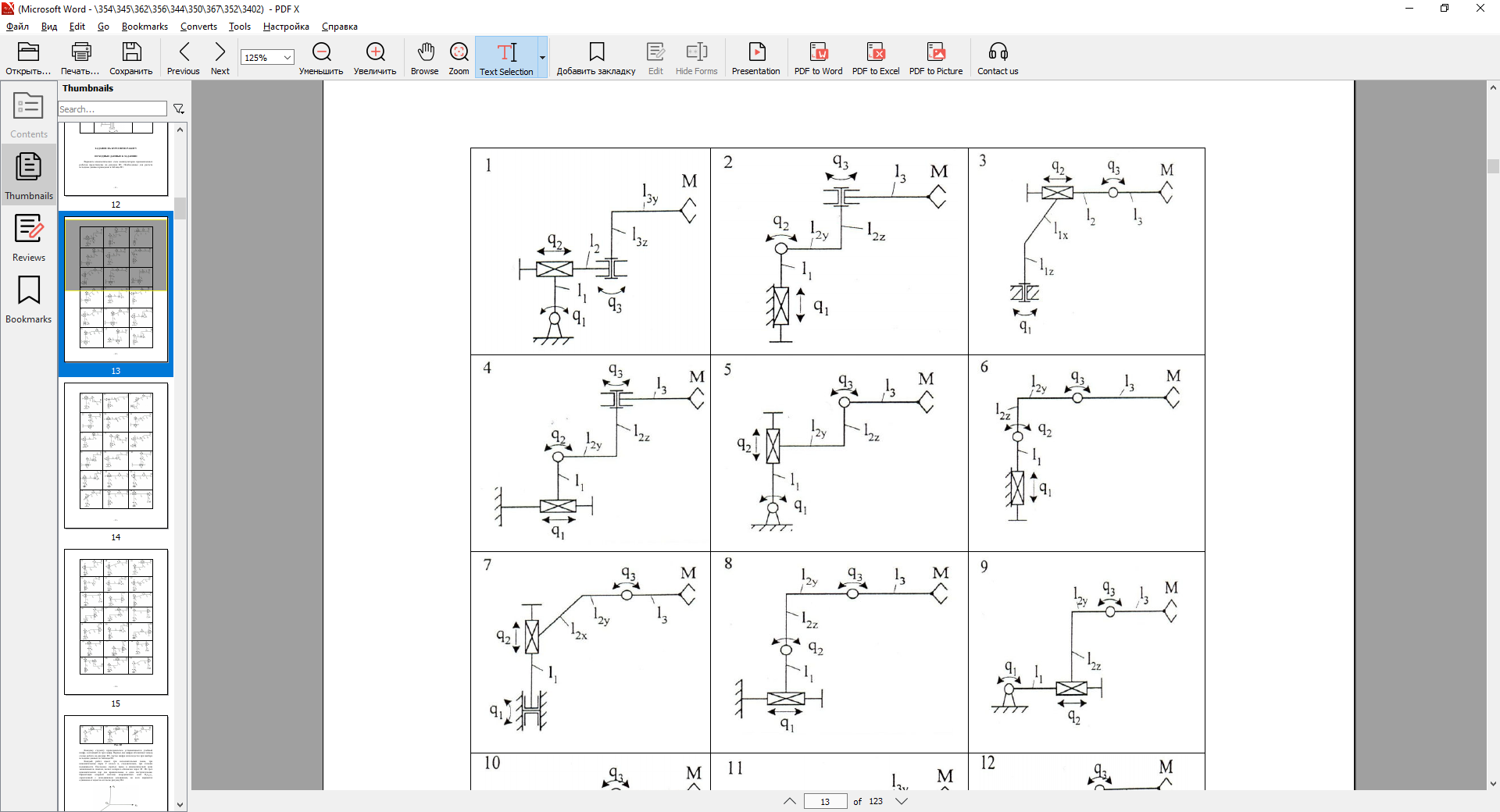
Рис. 1. Варианты кинематических схем манипуляторов мехатронных устройств
Далее на основании исходных данных, необходимо:
-
Изобразить и проанализировать исходную схему. -
Установить, что манипулятор обладает тремя степенями -
подвижности. -
Ввести опорную и локальные системы координатных осей и -
обобщенные координаты q 1 , q 2 , q3 . -
Изобразить кинематическую модель манипулятора.
Далее по предложенной методике выполняются следующие пункты.
-
Расчет программного процесса позиционирования. -
Определение положения полюса схвата. -
Определение ориентации схвата. -
Расчет программной траектории полюса схвата. -
Определение угловых скоростей и ускорений звеньев. -
Определение линейных скоростей и ускорений точек звеньев. -
Расчет геометрических и кинематических ошибок. -
Расчет упругих статических ошибок.
Далее проводим динамическое исследование жесткого робота в программе Mathcad.
-
Расчет инерционных характеристик звеньев. -
Силовой расчет робота. -
Составление дифференциальных уравнений движений робота. -
Выбор электродвигателей и передаточных механизмов. -
Расчет динамических ошибок в парциальной системе.
4. НА ОСНОВАНИИ КИНЕМАТИЧЕСКОГО И ДИНАМИЧЕСКОГО ИССЛЕДОВАНИЯ МЕХАТРОННОГО УСТРОЙСТВА СТРОИТСЯ 3D-МОДЕЛЬ КОНСТРУКТИВНОЙ КОМПОНОВКИ МАНИПУЛЯТОРА (РИС.2).
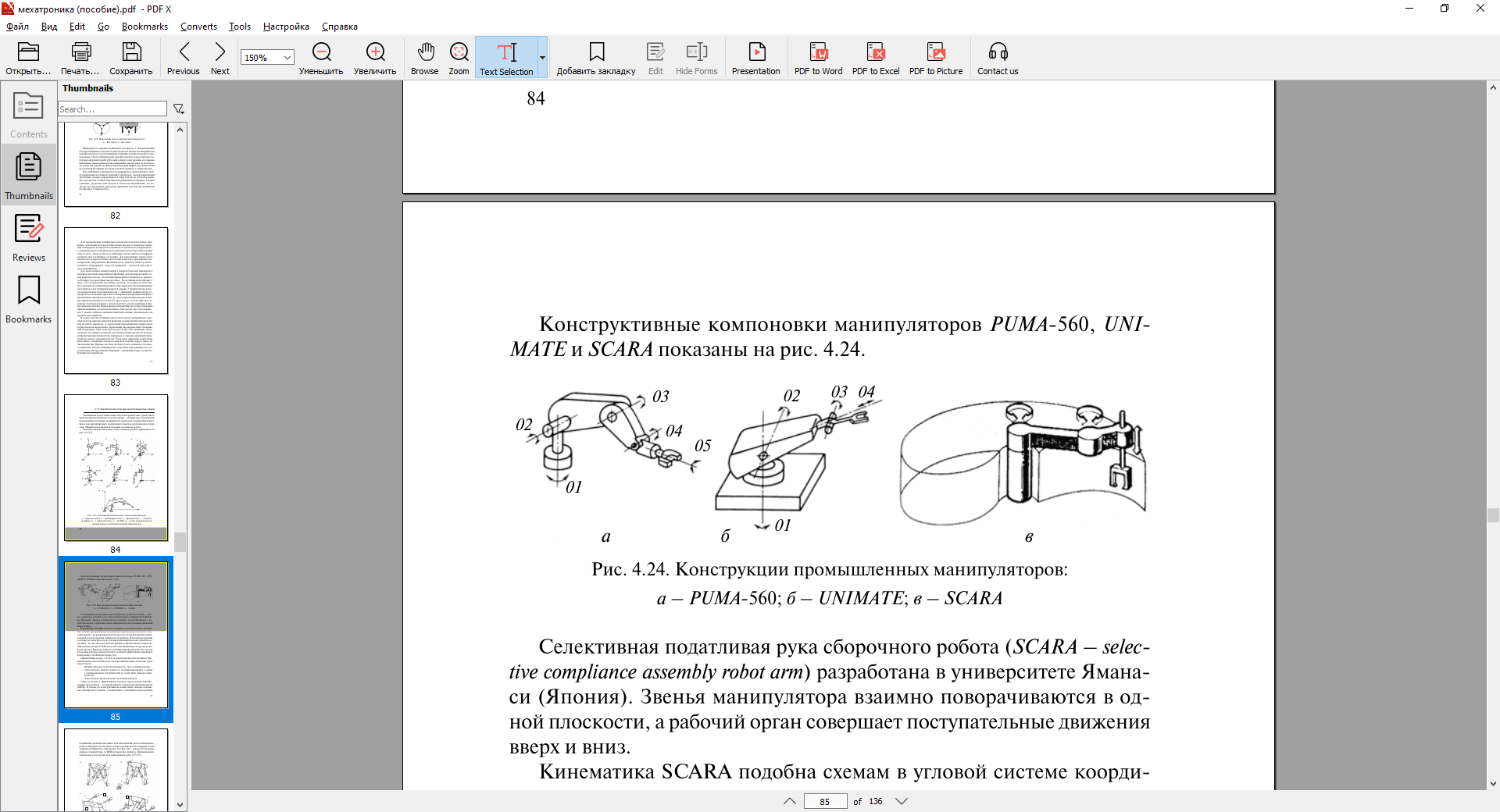
Рис. 2. Примеры конструкций промышленных манипуляторов:
а – PUMA-560; б – UNIMATE; в – SCARA
Проведем анализ и выбор CAD-системы для построения 3-d модели
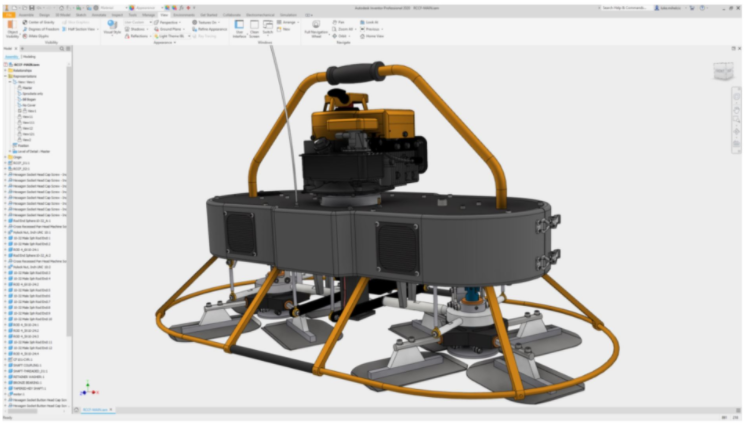
Inventor - Программное обеспечение Autodesk Inventor предоставляет решения для проектирования и инжиниринга. C помощью Inventor инженеры могут интегрировать 2D- и 3D-данные в единую среду проектирования, создавая виртуальное представление конечного продукта, проверяя форму, соответствие и функции продукта еще до его создания.
Преимущества: многообразие методов моделирования трехмерных моделей, широкие возможности сборки — подключение файлов из других САПР, симулятор кинематики.
Недостатки: только для Windows, сильная нагрузка на ПК в процессе работы с обеспечением, сложный для обучения, при большом количестве деталей программа часто “тормозит” “вылетает”.
Вид процесса работы:
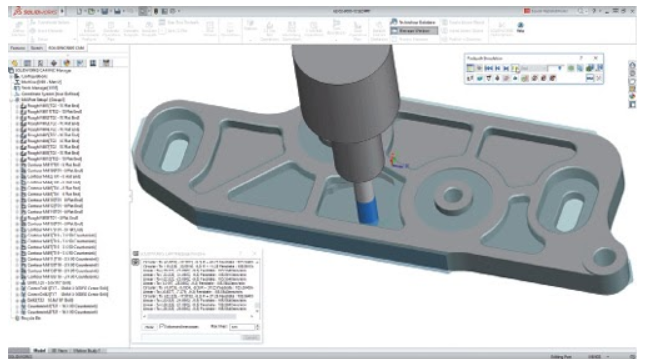
SolidWorks- программное обеспечение автоматизированного проектирования, позволяющее создавать, моделировать, публиковать и управлять 3D моделями.
Преимущества: одна из самых популярных CAD-программ в мире, гибкость в настройке, достаточна простая в понимании программа.
Недостатки: часто “вылетает”, не развиты инструменты для коммуникации внутри проекта, поглощает много ресурса во время работы.
Вид процесса работы:
Компас-3D - Комплексная система автоматизированного проектирования, направленная на машиностроение, разработку чертежей, проектирование кабельных систем и создание документов для инженерных проектов.
Преимущества: простота в освоении, интерфейс и дополнительная информация на русском языке, поддержка многих форматов, широкий инструментарий.
Недостатки: вероятность проблем при импорте 3D моделей из сторонних программ, проектировать в 3D сложнее, чем в 2D, хромает возможность визуализации.
Вид процесса работы
Построение будем проводить в программе SolidWorks. Расчет модели будет производиться в программе MatLab.
5. МЕТОДИКА ИССЛЕДОВАНИЯ ДИНАМИЧЕСКИХ ПРОЦЕССОВ 3D-МОДЕЛИ МЕХАНИЗМА В СРЕДЕ MATLAB
-
Получение из 3D-модели САПР SolidWorks исследуемого механизма математической модели в среде MatLab -
Последовательность трансляции 3D-модели в среду MatLab включает следующие процедуры:
-экспорт 3D-модели САПР SolidWorks в xml-файл данных (рис. 1);
-импорт xml-файла данных в среду MatLab (рис. 2).
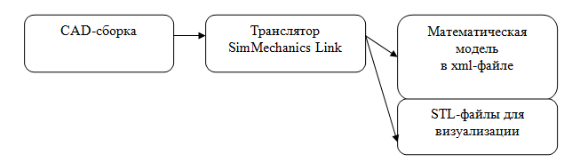
Рис. 3. Экспорт 3D-модели из CAD-системы
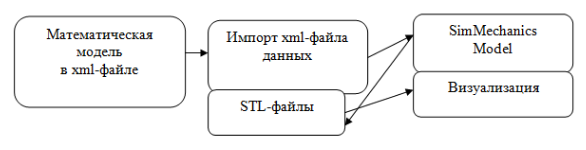
Рис. 4. Импорт xml-файла данных в среду MatLab
5.1.1. Экспорт 3D-модели в xml-файл данных
Для экспорта из CAD-систем SolidWorks 3D-модели механизма в CAE-систему MatLab необходимо сохранить сборку 3D-модели в формате xml. Для версий MatLab 2008b и старше вместе с xml-файлом CAD-транслятор создает stl-файлы, необходимые для визуализации модели в среде MatLab.
XML-файл – текстовый файл, в котором детали исходной сборки механизма интерпретируются как тела, а сопряжения между ними – как степени свободы.
STL-файлы, создаваемые в процессе трансляции, содержат описание геометрии деталей и могут быть получены старшими версиями CAD-трансляторов, начиная с версии 3.0 (MatLab R2008b).
Экспорт 3D-модели может происходить как с раскрытием подсборок, так и без их раскрытия.
Если при экспорте 3D-модели детали, объединённые в подсборку, интерпретируются в системе MatLab как одна деталь, – это экспорт 3D-модели с нераскрытием подсборок.
Если при экспорте 3D-модели детали, объединенные в подсборку, интерпретируются в системе MatLab как разные детали, –это экспорт 3D-моделис раскрытием подсборок.
Для сохранения 3D-модели в xml-файл данных в системе SolidWorks необходимо вызвать пункт меню «Файл» -> «Сохранить как» и выбрать расширение файла *.xml. На рис. 5 и 6 приведен пример сборки из двух деталей – стойки и маятника, SolidWorks и полученной динамической модели в среде MatLab.
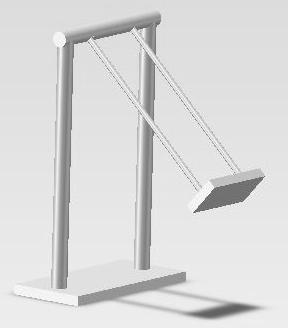
Рис. 5. 3D-модель в SolidWorks

Рис. 6. Модель в MatLab
В Simulink-модели присутствуют обязательные блоки:
- RootGround (обозначает твердое основание, например, землю);
- env (задает параметры модели, такие как направление и величину силы гравитации);
- RootPart (тело нулевой массы, необходимое для создания замкнутой системы). Модель содержит два тела Body (stoika-1 и swing-1) и три типа соединений, задающие степени свободы между телами, Joint (Weld, Weld1 – жесткие соединения и Revolute – вращение).
Изменить настройки трансляции в системе SolidWorks можно двумя способами. Первый способ позволяет изменять свойства трансляции из окна параметров CAD-транслятора (меню SimMechanics Link) (рис. 7). По умолчанию в системе SolidWorks параметры настроены на раскрытие подсборок (опция «Решить свободно»)
Второй способ позволяет изменять свойства трансляции непосредственно в окне свойств компонента подсборки (рис. 8). Вкладка Solve SubAssemblies Using определяет, будет ли данная подсборка транслирована как одна деталь (трансляция без раскрытия) или нет. Включенная опция Flexible Settings определяет трансляцию с раскрытием подсборки. Опция Component properties определяет трансляцию согласно настройкам системы SolidWorks (окно параметров CAD-транслятора). Вкладка Assembly Tolerances определяет точность, с которой все размеры подсборки будут учтены.
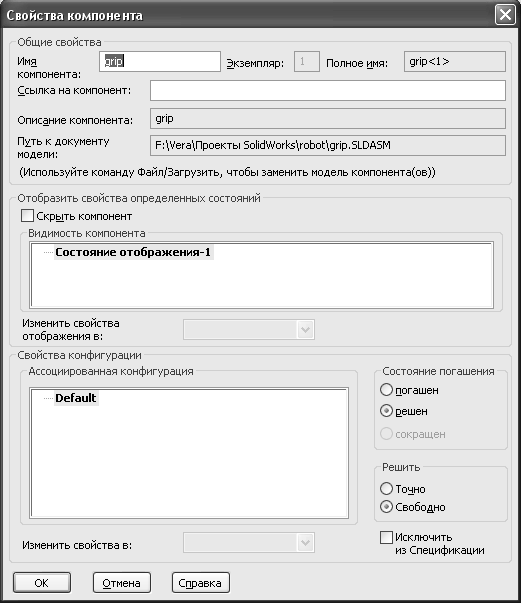
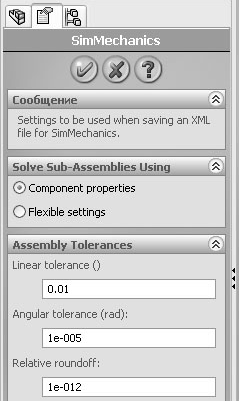
| Рис. 7. Окно параметров настройки трансляции | Рис. 8. Окно свойств компонента сборки (подсборки) |
5.1.2. Экспорт 3D-модели в xml-файл данных
Система MatLab на основе сгенерированного xml-файла данных (рис. 9) строит динамическую модель.
Импорт xml-файла в среду MatLab осуществляется командой import physmod (в версиях MatLab до 2008a включительно), а начиная с версии 2008b - командой mech_import.
В процессе трансляции могут возникать ошибки. CAD-транслятор по каким-либо причинам может не распознать соединение деталей и воспринять его как жесткое соединение (Weld) –тогда вместе с xml-файлом создается файл ошибок. В файле ошибок указываются тела и сопряжения между ними, которые транслятор не смог правильно интерпретировать. Для исправления ошибок можно либо заменить тип сопряжения в исходной сборке 3D-модели, либо заменить степени свободы между телами в динамической модели в соответствии с задачей исследования.
Импорт xml-файла в среду MatLab, начиная с версии 2008b, возможен в разных режимах: создание новой модели; обновление существующей модели или обновление одной, или нескольких подсистем в существующей модели (рис. 9).
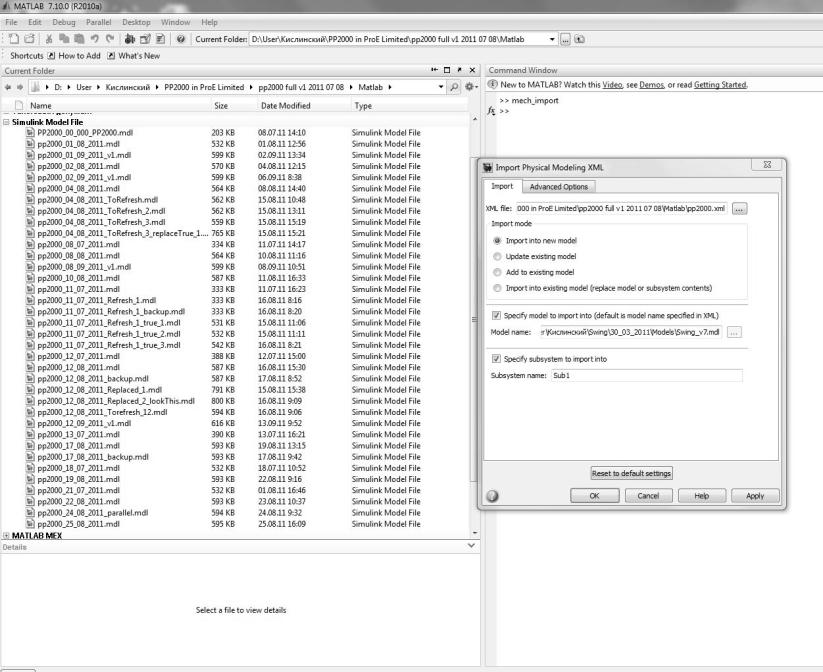
Рис. 9. Чтение xml-файла системой MatLab
При импорте xml-файла данных необходимо, чтобы stl-файлы находились в той же папке.
Таким образом, на этом этапе происходит преобразование геометрии деталей и их сопряжений из 3D-моделей САПР SolidWorks в массоинерционные характеристики и степени свободы между телами динамической модели Matlab.
5.2. Доработка полученной математической модели исследуемого механизма
Полученная динамическая модель в MatLab содержит массоинерционные характеристики деталей и степени свободы между телами, но не содержит действующих сил, и все необходимые силы необходимо моделировать в среде MatLab Simulink самостоятельно в соответствии с задачей исследования.
Для исследования механической системы необходимо воспользоваться библиотекой Simulink SimMechanics (рис. 10-11).


| Рис. 10. Блоки силового воздействия | Рис. 11. Блоки, работающие с сигналами в формате Simulink |
Body Actuator – блок передачи управляющего сигнала.
Body Sensor–блок для измерения параметров механических звеньев. Он присоединяется к звену, в окне настройки его параметров устанавливаются измеряемые величины (сила, момент, угол, угловая скорость, угловое ускорение, линейная позиция и т.д.). Body Sensor преобразует измеренный сигнал к формату Simulink.
Constant – блок, задающий постоянный сигнал. Сигнал формата Simulink.
Gain – блок увеличения или уменьшения сигнала. На число, заданное в этом блоке, умножается сигнал, подключенный к этому блоку.
5.3. Исследование динамики механизма
Моделирование работы механизма в среде Simulink проводится в режимах прямой динамики или обратной динамики.
В режиме прямой динамики входными являются управляющие воздействия (силы, моменты), а выходными (измерения) - параметры движения: величины линейных и угловых перемещений, скорости, ускорения, время перемещений.
В режиме обратной динамики исходными являются перемещения механизмов и их элементов как функции времени. В результате моделирования определяются силы (моменты), вызвавшие перемещения. Для трехмерной визуализации моделируемой сборки в среде MatLab необходимо, чтобы stl-файлы находились в той же папке, что и mdl-файл динамической модели.
После проведенного моделирования необходимо зафиксировать результаты работы и для этих целей в библиотеке элементов Simulink есть элементы, обеспечивающие вывод информации в числовом (Display) или графическом виде (Scope) или передачу ее как массива данных в рабочую область (To Workspace) для последующей обработки.
ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ И ПЕРЕДАТОЧНЫХ МЕХАНИЗМОВ
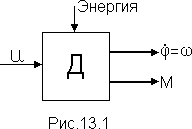 6.1 Характеристики двигателей. Двигатель будем рассматривать как динамическое звено (рис.13.1), на вход которого подается управляющее воздействие u, а выходными переменными являются угловая
6.1 Характеристики двигателей. Двигатель будем рассматривать как динамическое звено (рис.13.1), на вход которого подается управляющее воздействие u, а выходными переменными являются угловаяскорость ɺ и движущий момент на
звена и движущая сила).
валу М (в линейных двигателях это будут линейная скорость выходного
Управляющее воздействие uуправляет потоком преобразуемой энергии. Таким управлением может быть электрическое напряжение или частота тока (в электродвигателях), положение золотникового штока (в пневмо и гидродвигателях), и т.п.
Функциональные зависимости, связывающие между собой переменные u,, и М, называются характеристиками двигателя. Достаточно общей формой характеристики, справедливой для многих типов двигателей, является динамическая характеристика [8]:
ст (u,ɺ).
(13.1)
Здесь параметр, имеющий размерность времени, называется постоянной времени двигателя; он характеризует инерционность процесса преобразования энергии (в электродвигателях его обычно
называют электромагнитной постоянной времени); ст (u,ɺ)
статическая характеристика двигателя, определяющая момент на валу
ст (u,ɺ).
при различных постоянных значениях uи ɺ.
(13.2)
Функциональная зависимость (13.2) чаще всего является нелинейной. В тех случаях, когда в рабочем режиме значения
переменных М, u, ɺ остаются близкими к некоторым номинальным
постоянным значениям Мн,
uн, ɺн, функцию (13.2) можно
линеаризовать и представить в виде
ст (u,ɺ) ru sɺ,
(13.3)
где
1 2 3 4
r регулировочный коэффициент,
s крутизна (жесткость)
 статической характеристики:
статической характеристики: r u uн,
r u uн,s
u uн
ɺ ɺн ɺ ɺн
Линеаризованная динамическая характеристика имеет вид
ɺ
-
ru sɺ
(13.4)
Заметим, что характеристикой (13.4) обладают электродвигатели постоянного тока с независимыми возбуждением, в которых управляющим воздействием uявляется подводимое к обмотке якоря напряжение.
В двигателях, обладающих жесткой статической характеристикой, скорость ɺ практически не зависит от момента М. Если к тому же предположить, что постоянная времени
0, приходим к идеальной характеристике двигателя
ɺ ru
s
(13.5)
Следует отметить, что параметры rи sможно найти используя
каталожные данные: номинальный момент Мн и номинальную
скорость н при номинальном напряжении uн, а также скорость
холостого хода xx . Из уравнений
н ruн sн, 0 ruн sхх
получаем
s н ,
хх н
r sхх.
uн
(13.6)
-
Мощность двигателя. Программная мощность, которую должен развивать двигатель s - ой кинематической пары для
осуществления программного движения s - го звена определяется в виде
qsп (t),
Psп
(t)
1
sп
Qдsп
-
qɺsп
(t),
s 1, 2.
(13.7)
Здесь
sп КПД
s - го передаточного механизма;
qɺsп (t)
текущее значение программной скорости звена;
Qдsп (t) текущее
значение программной обобщенной движущей силы, действующей со стороны передаточного механизма на s- ое звено и определяемой из дифференциальных уравнений движения робота (12.6).
-
Выбор электродвигателя. При проектировании электропроводов приходится учитывать большое число факторов: требуемая мощность; допустимая перегрузка по моменту; частота включений; диапазон регулирования скорости; требуемая точность, и т.п. [7, 16].
Опуская подробности, ограничимся упрощенной постановкой задачи. Будем исходить из условия приблизительного равенства
номинальной мощности электродвигателя Pн
и максимального
значения программной мощности
(Pп) max, т.е.
Pн (Pп) max.
(13.8)
По расчетному значению
(Pп) max
из приложения П1 выбираем
подходящий двигатель с каталожными данными: